| 编辑推荐: |
本文主要介绍了无人机(UAV)及集群任务规划相关内容。希望对你的学习有帮助。
本文来自于知乎,由火龙果软件Linda编辑,推荐。 |
|
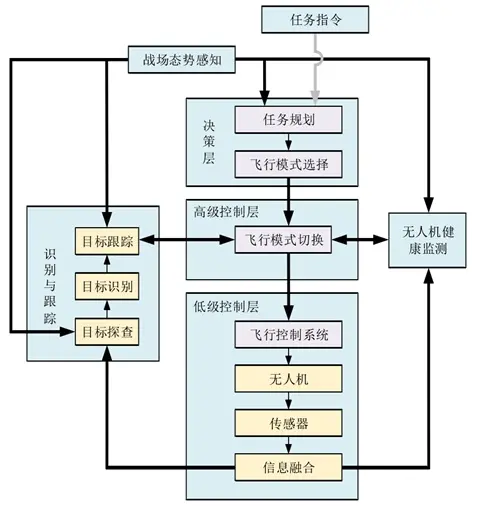
典型多无人机自主决策与控制系统
自主决策和控制使无人机有能力在无人操作的情况下独立完成任务。目前国际上采用自主控制级别(Autonomous
Control Level,ACL)这一概念来衡量各类自动化载具的实现自主决策与控制的程度。美国的有关部门建立了衡量ACL标准,将各类自动化载具的ACL划分为10级。而对于无人机而言,ACL的10个等级则大致可以分为三大类:低级别自主(ACL1∼4)、中级别自(ACL5∼7),和高级别自主(ACL8∼10)。在低级别自主等级下,无人机被远程遥控。通过操作人员的操控,无人机能够完成各种复杂的任务。低级别自主的无人机(ACL1∼4)基于远程遥控控制,是目前最普遍使用的无人机控制方式。远程遥控控制的系统结构简单,属于集中化控制方式。ACL中级别自主等级要求当人工参与有限的情况下,多无人机能够在一定程度上自主决策和自适应地完成任务。ACL高级别自主等级强调无人控制的无人机的群体作战能力。
任务规划技术是实现多无人机自主决策与控制的关键。
无人机在完成任务过程中,需要对如何有效、安全地完成自己的任务过程进行规划,这就是所谓的任务规划(
Mission Planning).无人机任务规划包括针对单无人机的任务规划和针对多无人机协同作战的任务规划。单无人机任务规划,就是自作战目标确定到作战任务完成的整个过程中,安排无人机在飞行过程中执行何种飞行任务以及如何实施这些飞行任务,使无人机生存概率和作战效能达到最佳。多无人机协同任务规划,除了需要考虑任务本身构成要素的要求外,还必须考虑多个无人机之间协调一致共同执行任务的约束关系,并根据任务规划指标为无人机设计出协同的飞行航路,使其整体作战效能最优或近似最优。因此,无人机任务规划是一个约束条件众多、复杂且耦合的多目标优化与决策问题,需要综合利用运筹学、智能计算以及计算几何等理论和技术降低问题求解难度并求解。
所以,有效的多无人机任务规划系统是提高多无人机集群化作战能力的关键。而先进的多无人机任务规划系统要求能够尽可能提高任务的整体执行效率,并且要求其反应速度快、运行效率高、具备战场实时运行能力,且能够处理大规模的无人机集群决策需求。在这一过程中,对于每一架无人机,可能无法保证其任务执行过程的局部最优化,但是对于整个无人机集群,却应该尽可能保证任务执行的整体最优化。
1常用的任务规划方法
1.1单无人机航路规划方法
航路规划和航路生成作为任务规划的子问题,首先充分考虑无人机内在约束、避障约束,以及环境扰动的因素的情况下,进行飞行航路的初步规划,其次根据分配结果利用优化搜索算法为每个载具个体或无人机个体生成最佳航路,最后进行航迹平滑处理,使得每架无人机在满足运动学、动力学、障碍规避、威胁躲避等要求的前提下,达到任务执行效果的最优化。
航路规划从是否已知障碍和威胁可以分为静态航路规划和动态航路规划。
由于选择路径规划算法是依据所构建的环境模型而定的。空间环境的分类如下:
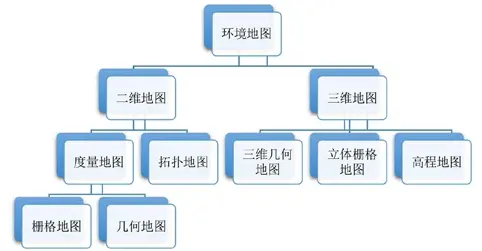
航路规划空间环境的分类
无人机的常用二维空间环境建模表达方法分为1、拓扑地2、度量地图。其中描述方法包括:1、通视图法2、Voronoi图法3、可视图法4、切线图法5、栅格地图法6、拓扑地图法。
常用的三维地图包括:1、三维栅格图2、三维几何地图3、高程图
在已知环境的情况下,静态航路规划方法有:1、几何法2、单元划分法3、基于模糊逻辑的路径规划法。
动态航路规划方法根据算法原理可分为基于控制理论的优化算法以及基于几何学的搜索算法,其中基于几何学的搜索算法又分为随机性搜索和确定性搜索,随机性搜索算法包括:1、遗传算法2、神经网络算法、3、粒子群算法4、模拟退火算法5、禁忌搜索算法6、人工免疫系统算法7、人工势场法8、蚁群算法9、快速随机搜索树法等。确定性搜索算法包括:1、填充函数法2、打洞函数法3、D.C.规划算法4、区间法5、单调规划6、分支定界方法7、积分水平集方法等。
常见的航迹平滑研究方法有1、圆弧段串联法2、地形光滑法3、力平衡法4、平滑算子法5、滤波法6、B
样条曲线法7、Dubins path法等。
1998年在机器人领域航路规划已被证明是一个NP问题,因此为解决单无人飞行器航路规划计算量大求解困难的问题,目前比较普遍采用的数学计算方法包括:1、最速下降法2、最优控制算法、3、牛顿迭代法4、梯度法5、整数规划算法6、电势理论法7、参数优化法以及8、图论方法,如可视图法、Dijkstra法、V图法等。
在1、数学计算方2、智能启发方3、自主行为方法等三类航路规划算法的基础上,有一些基于多种算法的结合算法在航路规划问题求解中取得了较好的效果。因此发展趋势呈现出多种规划方法有机结合的特点,使得算法既能在全局规划过程中快速地收敛至最优解,又具备在局部规划过程中对于突然出现的扰动和不确定性迅速作出反应的能力,使整个规划过程更加智能。
1.2多无人机协同航路规划方法
针对多无人机编队轨迹规划问题中,现有的研究通常分为两种思路,第一种为数值优化求解思路,基于伪谱法直接求解最优轨迹,这种方法优点在于求解精度高,但伪谱法对于单机轨迹规划问题来说,求解实时性较强;但当约束形式过于复杂时,往往很难快速获得最优轨迹。第二种思路是传统优化求解思路,首先基于路径搜寻或启发式算法或者无人机最优路径点,路径点间通过插值拟合方式获得最优轨迹,优点在于实时性强,但最优轨迹求解过程中,没有考虑无人机运动模型。
1.3多无人机协同任务分配方法
多无人飞行器协同任务分配是一个多约束优化问题,对多无人机协同任务分配问题的分类中最有影响力且已经被广泛接受的,是
Gerkey 和 Mataric 于 2004 年提出的分类方法,主要从任务需求无人机的数量,无人机同时执行任务的能力,以及分配情况在时间上的体现情况这三个维度对多无人机协同任务分配问题进行分类:
1) 单无人机(SR)和多无人机任务(MR):该维度从一个任务需求的无人机数量出发,SR 指任务要求由单独的一个无人机完成,MR则指任务需要由两个或以上的无人机协作才能完成。
2) 单任务无人机(ST)和多任务无人机(MT):该维度从一个无人机可以同时执行任务数量的能力出发,ST
指无人机只能同时执行一个任务,MT 则指无人机可以同时执行多个任务。
3) 即时分配( IA)和延时分配(TA):IA 指关于任务对无人机的分配是实时的,对将来没有计划的,而
TA 指知道所有需要被分配的任务的集合的情况,可以对无人机未来随着时间的推移如何推进不同任务进行计划。
根据上述三个维度的分类准则,则多无人机协同任务分配问题一共被分为 8 类:STSRIA、STSRTA、MTSRIA、MTSRTA、STMRIA、STMRTA、MTMRIA、MTMRTA。
STSRIA 是其中最简单的一类,也就是经典的最优分派问题。在搜救场景中,对应的情况为关键位置的数量与搜索无人机个数恰好相等的情况,或需要救援的任务个数与救援无人机个数恰好相等。每个无人机可以完成一个任务并对应相应的效用值,则该问题模型的目标为分配后所有无人机完成任务的总效用最高。该模型可以通过匈牙利算法等集中式方法[152–156]
或者拍卖算法等分布式方法求得最优解。
STMRIA 是另一类瞬时分配的问题,这类问题中,无人机数量一般大于任务数量(n > m),每个任务需要同时由一个或多个无人机协作完成,在搜救场景中,对应的情况有:受灾人员同时需要多种不同的救援资源(如食物、医疗等),单台搜索无人机不具备收集关键地点所有需要的信息的功能等。不同的无人机子集完成不同的任务对应不同的效用值,解决该问题需要找到效用最大的子集划分方式。
在实际情况中的大部分任务分配场景中,由于资源的限制,通常任务数量远大于无人机数量(m > n),如在搜救场景中,进行搜索或救援的人员、设备往往远少于需要被搜索的地点、需要被救援的人员,这种情况下一个无人机需要被分配多个任务,但同一时刻,只能完成一个任务,则需要按一定顺序依次完成被分配的任务,STSRTA
指的就是这类任务分配问题。STSRTA 问题与 STMRIA 问题恰好相反,需要将任务划分为n个没有交集的子集并分配给各个无人机,并需要额外为每个无人机安排任务执行顺序的序列一个任务序列的效用值与任务序列对应的任务集合以及任务在序列中的排列顺序相关,所以,STSRTA
问题也是调度问题的一种。当问题存在其他约束条件导致不是所有任务都能被成功分配时,任务序列中的任务个数可能小于任务子集中的任务个数。显然,STSRTA
问题也是强 NP 难问题,且比 STMRIA 更加复杂。
在任务数量远大于无人机数量(m > n)的场景中,如果一个任务可能同时需要多个无人机协同完成,该类问题归类为
STMRTA 问题。找到解决这类问题的最优解,需要考虑对所有无人机集合的划分方式的所有调度情况,显然为强
NP 难问题。目前解决这类问题的一种方式是将问题视为迭代的 STMRIA 问题进行求解。
其他几个多任务无人机(MT)类型的问题(MTSRIA, MTSRTA, MTMRIA,MTMRTA)在现实中不太常见,因为需要无人机同时执行多个任务,这类问题可以使用与上述类型的问题的类似的方法解决。
这类问题是强 NP 难问题,但已经被很多学者进行深入的研究,并提出大量求解方法,主要有两种框架及相应的两种求解形式:混合整数线性规划框架(MILP)和马尔科夫决策过程(MDP)框架,集中式和分布式两种求解形式。
集中式控制中的求解方法主要包括:1、最优化方法2、启发式方法。
分布式控制中的求解方法主要包括:1、基于市场机制的算2、协商一致理3、对策论4、基于拍卖的算法等。
MILP框架集中式求解方法主要有传统优化方法:1、分支定界法2、动态规划法3、启发式优化方法:遗传算法、蚁群算法等。MILP框架分布式求解方法主要有1、蚁群算法2、粒子群算法等。
MDP框架集中式求解方法主要有1、MDP模型求解2、部分可观MDP模型求解;分布式求解方法1、多智能体部分可观MDP求2、分散式部分可观MDP求解等。
2问题一般解决步骤:
建立无人机任务规划问题的数学模型,然后建立无人机及任务场景的模型,包括无人机物理模型、无人机任务基本模型、任务模型分类、任务绩效模型、无人机碰撞威胁模型,以及禁飞区威胁模型等场景数学模型,提出任务分配问题及任务调度问题的基本假设及问题模型。给出航路规划问题的基本假设、简化动力学模型、航路规划基本模型、航路规划问题分解。 |






 订阅
订阅