| 编辑推荐: |
本文关注汽车智能化和网联化发展趋势,重点介绍相关细分领域,希望对您的学习有所帮助。
本文来自于
TC View
,由火龙果软件Alice编辑、推荐。 |
|
智能网联汽车(Intelligent and Connected Vehicle,
ICV ) 是指搭载先进的车载传感器、控制器、执行器等装置,并融合现代通信与网络技术,实现车与X(
车、路、人、云等) 智能信息交换、共享,具备复杂环境感知、智能决策、协同控制等功能,可实现安全、高效、舒适、节能行驶,并最终实现替代人来操作的新一代汽车。
智能网联汽车按功能可分为车载网络通信模块和自动(辅助)驾驶模块两部分,其中车载网络通信模块负责车联与外部的通信(包括车与车之间、车与路之间、车与网之间的通信),自动(辅助)驾驶模块实现车辆的辅助驾驶和自动驾驶功能。本文关注汽车智能化和网联化发展趋势,重点介绍相关细分领域。
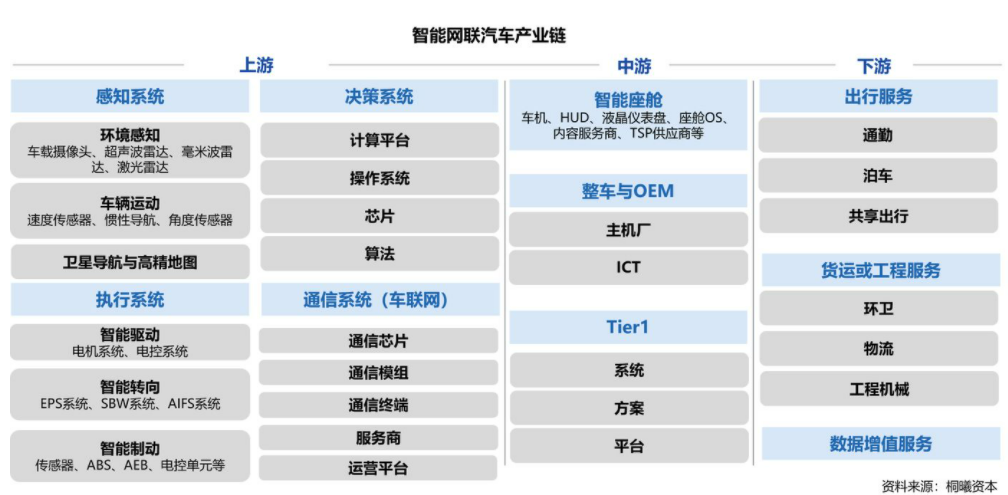
上游:包含感知系统、决策系统、执行系统和通信系统
重点关注摄像头、雷达、高精地图、V2X(车联网)、自动驾驶芯片等细分领域。
1、 摄像头
车载摄像头的工作原理是目标物体通过镜头(LENS)生成光学图像投射到图像传感器上,将光信号转变为电信号,再经过模数转换(A/D)后变为数字图像信号,最后由数字信号处理芯片(DSP)进行加工,处理成特定格式的图像输出到下游需求方。从摄像头的组成看,主要子系统为镜头、CMOS传感器、模组组件、独立ISP芯片以及算法等。按照其配置的区域不同,可以分为前置、侧视、后视和内视、环视摄像头等。一般来讲,典型的辅助驾驶系统由4个环视、1个前视和1个后视至少6个摄像头组成。
2、 雷达
汽车雷达是指用于汽车或其他地面机动车辆的雷达。 因此, 它包括基于不同技术(如超声波、微波、激光),有着不同的功能(如发现障碍物、预测碰撞、
自适应巡航控制),以及运用不同的工作原理( 如脉冲雷达、FMCW雷达、微波冲击雷达) 的各种不同雷达。按技术分类,汽车雷达一般分为3种:超声波雷达、毫米波雷达、激光雷达。
超声波雷达的工作原理,是通过发射频率超过40KHz的超声波,根据时间差测算0.2m至5m内障碍物的距离,其测距精度大约是1~3厘米左右。超声波雷达主要支撑倒车辅助、自动泊车等驾驶辅助功能。
毫米波雷达是通过天线向外发射毫米波(频率主要集中在24GHz和77GHz),接收目标反射信号,经后方处理后快速准确地获取汽车车身周围的物理环境信息(如汽车与其他物体之间的相对距离、相对速度、角度、运动方向等)。利用毫米波雷达可以实现自适应巡航控制(Adaptive
Cruise Control),前向防撞报警(Forward Collision Warning),盲点检测(Blind
Spot Detection),辅助停车(Parking aid),辅助变道(Lane change
assistant),自主巡航控制(ACC)等高级驾驶辅助系统(ADAS)功能。
车载激光雷达又称车载三维激光扫描仪,是一种移动型三维激光扫描系统。其工作原理就是通过不断向周围目标发射探测信号(激光束),并接收返回的信号(目标回波)来计算和描述被测量物理的有关信息,如目标距离、方位、高度、姿态、形状等参数,以达到动态3D扫描的目的。激光雷达虽然有分辨率高、抗干扰能力强、获取信息量丰富等优点,但部分汽车厂商自动驾驶解决方案中不使用激光雷达,如特斯拉、华人运通等企业。


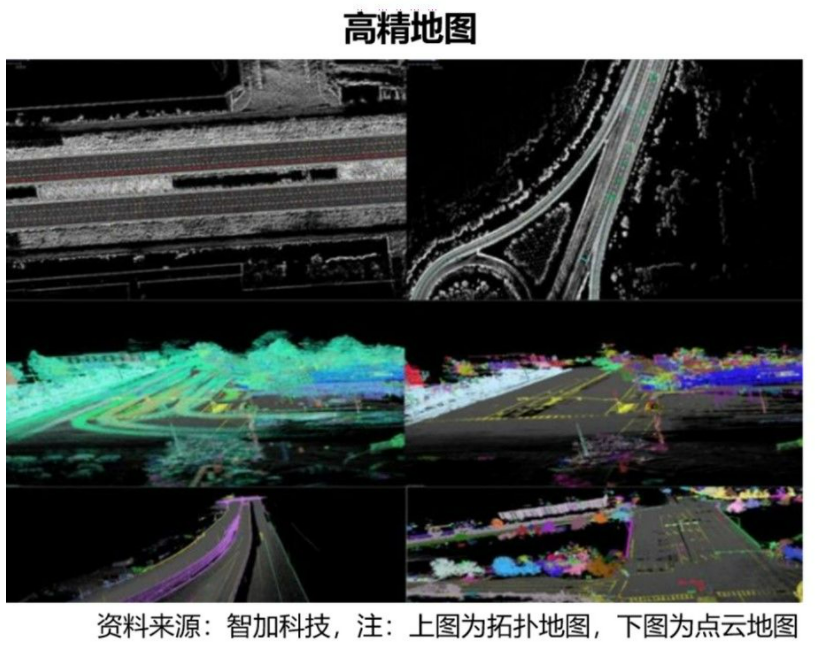
3、 高精地图
高精地图分为高精拓扑地图和高精点云地图,具体包含道路属性(车道数、施工状态等)、车道模型(车道线、曲率/坡度、中心线、车道属性变化等)、交通设施模型(交通信号灯、斑马线、停止线、交通标志等),以及可以叠加实时动态交通状况等信息,为自动驾驶车辆构建一个映射现实的虚拟道路环境模型,实现车路协同,为自动驾驶车辆规划行驶路径,躲避拥堵和交通障碍。
4、 V2X(车联网)
车路协同的核心基于V2X, V2X的主要内容包括车与车之间的直接通信(V2V),汽车与行人通信(V2P),汽车与道路基础设施通信(V2I),以及车辆通过移动网络与云端进行通信(V2N)。目前而言,基于V2V通信车辆能实现前方碰撞预警、变道辅助、左转辅助、协同式自适应巡航控制等,基于V2I通信可以实现速度建议、交通优先权、路况预警、闯红灯预警、当前天气影响预警、停车位和充电桩寻位等应用;基于V2P通信,能实现弱势道路使用者的预警和防护,基于V2N通信可实现实时交通路线规划、地图更新等服务。
5、 自动驾驶芯片
自动驾驶芯片主要包括通用计算芯片(CPU、GPU)、FPGA和专用芯片(ASIC),其中FPGA和ASIC是未来自动驾驶芯片的主流产品。FPGA
是在AI 芯片本身需要不断迭代改进的情况下,利用具备可重构特性来实现半定制的人工智能芯片的最佳选择之一。ASIC可进行全定制,使性能、功耗和面积等指标面向深度学习算法做到最优。自动驾驶等级与计算能力正相关,L2级别自动驾驶需求10TOPS算力,L3级别自动驾驶需求30TOPS以上算力,L4级别自动驾驶需求200TOPS以上算力,L5级别自动驾驶需求2000TOPS算力。
中游:包含智能座舱、整车厂与OEM、Tier1
重点关注高级辅助驾驶系统、智能座舱等细分领域。
1、 ADAS(高级辅助驾驶系统)
ADAS(Advanced Driver Assistance System),高级驾驶辅助系统,借助安装在汽车上的毫米波雷达、激光雷达、摄像头、超声波雷达等传感器设备来感知车身周围环境并收集数据,在进行静、动态物体辨识、侦测与追踪后通过系统的运算与分析,使司乘人员预先察觉可能发生的情况与危险,从而有效增加汽车驾驶的舒适性与安全性,减少交通事故出现的可能性。ADAS涵盖了L0-L2级别范围。我国参与ADAS领域的企业主要是整车企业、零部件企业、人工智能企业、通信企业等。

2、 智能座舱
智能座舱,即以多屏融合(液晶仪表 + HUD + 中控屏 + 后座娱乐)实现的交互体验。 多屏互动在未来有望由一颗芯片提供运算能力输出,以
UI 创新设计和 CAN 总线协议打通为基础,通过液晶仪表、HUD、中控屏及中控车载信息终端、后座HMI娱乐屏、车内外后视镜等载体,实现语音控制、手势操作等更智能化的交互方式。未来汽车智能座舱的发展方向是人车交互智能化,智能座舱将为驾驶者提供更高效更便捷的信息操作和交互方式,提升行车驾乘体验。
下游:包含出行服务、货运或工程服务和数据增值服务
自动驾驶商用车落地比乘用车更为领先,目前商用无人驾驶营运主要分为两块,一块是公共道路,主要是高速公路等干线运输重卡的无人驾驶;另一块是受限制区域,包括港口、矿山、短途无人配送、城市及园区环卫等。
|






 订阅
订阅