| 编辑推荐: |
本文主要介绍了CAN总线相关内容。希望对你的学习有帮助。
本文来自于知乎,由火龙果软件Linda编辑,推荐。 |
|
概要
上世纪八十年代以来,汽车ECU越来越多,如ABS,电控门窗,电子燃油喷射装置。如果仍然采用常规的点对点布线方式,即电线一段与开关相接,另一端与用电设备相通,将会导致车上电线数目的急剧增加,从而带来线束的冗余及维修成本的提高。这就对汽车的线束分布及信息通讯提出了更高的要求。总线技术可以实现信息的实时共享,解决了传统布线方式中线束多,布线难,成本高等问题,CAN(Controller
Area Network)总线技术应运而生。

点对点通信

总线通信
CAN总线是由德国研发和生产汽车电子产品著称的BOSCH公司开发的,并最终成为国际标准(ISO11519),是国际上应用最广泛的现场总线之一。CAN总线是一种多主控(Multi-Master)的总线系统。传统总线系统如USB或以太网等是在总线控制器的协调下,实现从A节点到B节点大量数据的传输。CAN网络的消息是广播式的,即在同一时刻网络上所有节点侦测的数据是一致的,它是一种基于消息广播模式的串行通信总线。

CAN总线的很多优点,使得它得到了广泛的应用,如传输速度最高到1Mbps, 通信距离最远到10km,无损位仲裁机制,多主结构。
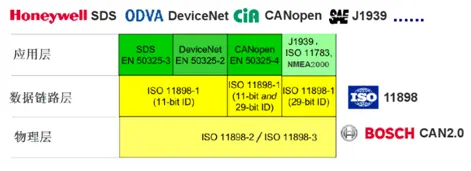
CAN总线标准
CAN总线标准之规定了物理层和数据链路层,至于应用层需要用户自定义。不同的CAN标准仅物理层不同。物理层和数据链路层:ISO11898;应用层:不同的应用领域使用不同的应用层标准。

CAN物理层
CAN拓扑网络
连接在CAN总线上的设备叫做节点设备(CAN Node),CAN网络的拓扑一般为线型。线束最常用的是双绞线,线上传输为对称的差分电平信号。下图为CAN总线网络示意图,节点主要包括Host、控制器和收发器。Host常集成有CAN控制器,CAN控制器负责处理协议相关功能,以减轻Host的负担。CAN收发器将控制器连接到传输媒介。通常控制器和总线收发器通过光耦或磁耦隔离,这样即使总线上过压损坏收发器,控制器和Host设备也可以得到保护。
在发送数据时,CAN控制器把要发送的二进制编码通过CAN_Tx线发送到CAN收发器,然后由收发器把这个普通的逻辑电平信号转化成差分信号,通过差分线CAN_High和CAN_Low输出到CAN总线网络。接收数据过程,相反。采用差分信号,可以取得更好的电磁兼容效果。因此,CAN总线物理传输媒介只需要两根线。

高速CAN总线最高信号传输速率为1Mbps,支持最长距离40m。ISO11898-2要求在高速CAN总线两段安装端接电阻RL(端接电阻一般为120Ω,因为电缆的特性阻抗为120
Ω,为了模拟无限远的传输线。)以消除反射。低速CAN最高速度只有125Kbps,所以ISO11898-3没有端接要求。

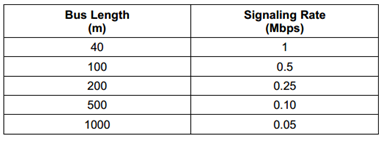
因为传输距离越大,信号时延也越大,为了保证消息的正确采样,总线上的信号速率相应也要下降。下图是推荐的信号速率与距离的关系。
CAN收发器
CAN总线分高速CAN和低速CAN,收发器也分为高速CAN收发器(1Mbps)和低速CAN收发器(125Kbps)。低速CAN也叫Fault
Tolerance CAN,指的是即使总线上一根线失效,总线依然可以通信。如同串口中的MAX3232用作电平转换,CAN收发器的作用则是把逻辑信号转换为差分信号。

差分信号
CAN总线采用差分信号传输,通常情况下只需要两根信号线就可以进行正常的通信。在差分信号中,逻辑0和逻辑1是用两根差分信号线的电压差来表示。当处于逻辑1,CAN_High和CAN_Low的电压差小于0.5V时,称为隐性电平(Recessive);当处于逻辑0,CAN_High和CAN_Low的电压差大于0.9V,称为显性电平(Dominant)。
高速CAN


低速容错CAN (Fault Tolerance CAN)

CAN总线遵从“线与”机制:“显性”位可以覆 盖“隐性”位;只有所有节点都发 送“隐性”位, 总线才处于“隐性”
状态。这种“线与”机制使CAN总线呈现显性优先的特性。

CAN总线连接器

|








