| 编辑推荐: |
本文主要介绍了自动驾驶--系统架构相关内容。希望对你的学习有帮助。
本文来自于微信公众号雪岭飞花,由火龙果软件Linda编辑,推荐。 |
|
01
分级和典型功能
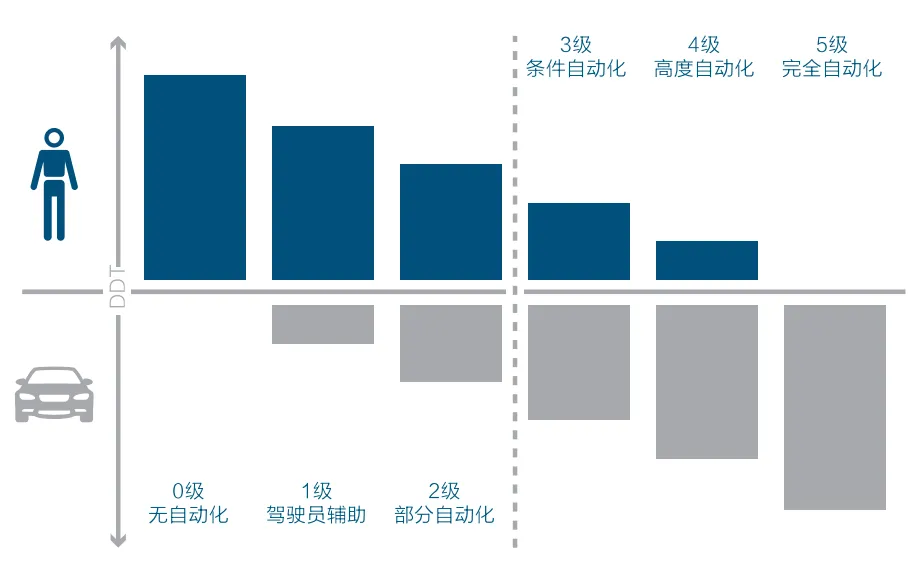
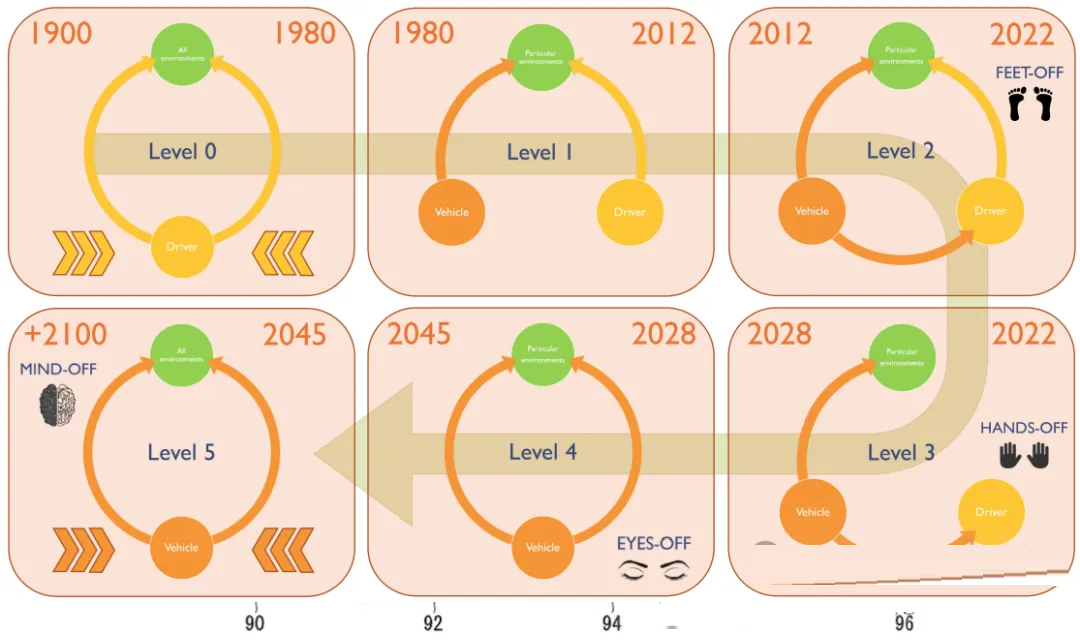
SAE(美国汽车工程师学会)在J3016标准中,定义了自动驾驶技术的六个级别,从L0到L5。
每个级别代表了自动驾驶系统的不同等级,每个等级对应系统不同的自主性,以及需要驾驶员不同的参与程度。

在不同自动驾驶等级中,人类驾驶员和自动驾驶系统的驾驶工作占比:
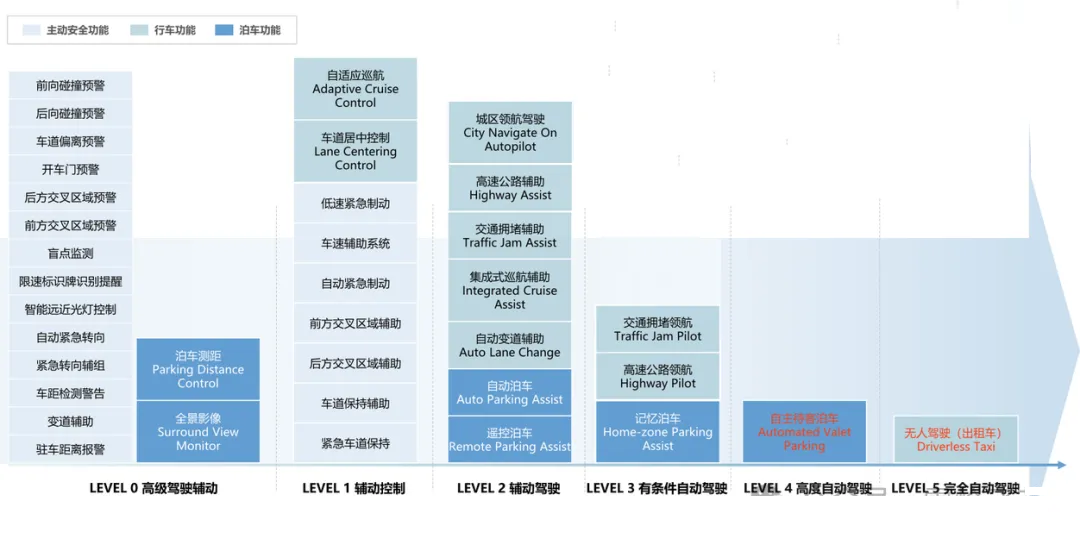
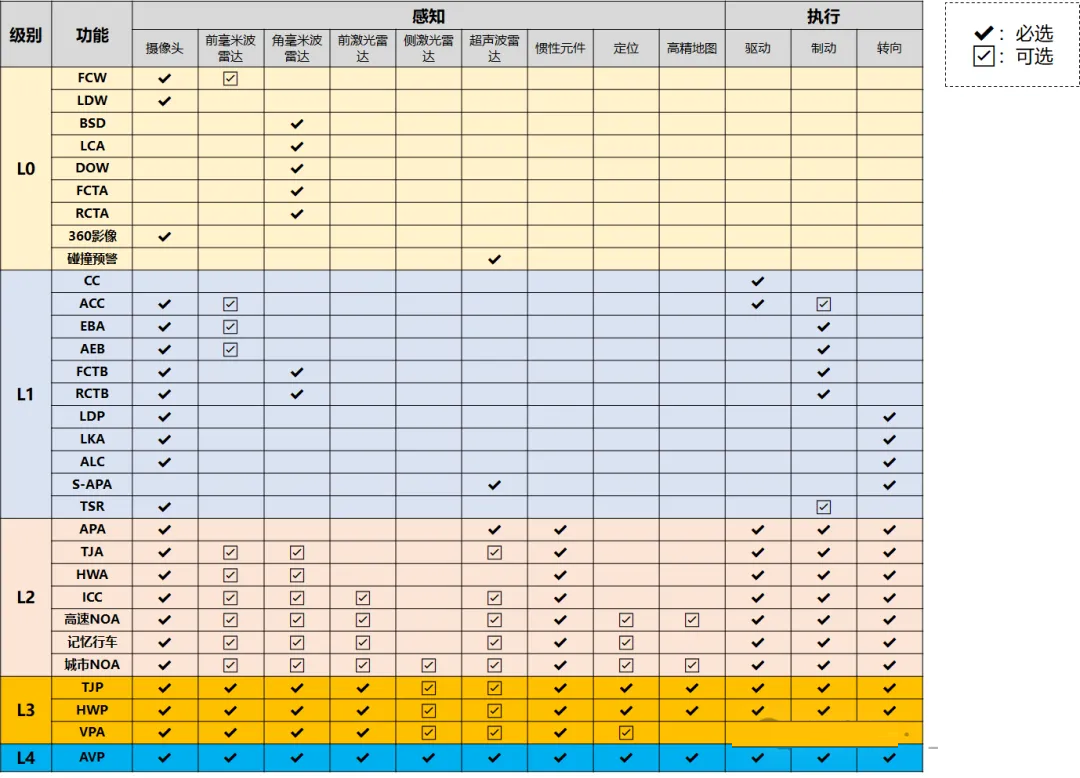
主要自动驾驶功能的分级概览:
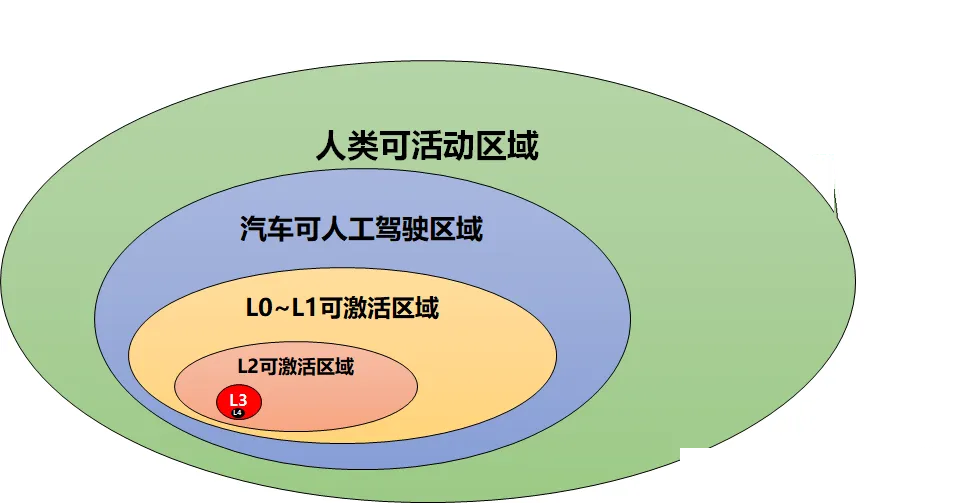
随着自动驾驶等级的提升,限制条件越来越多,可激活区域越来越小,如下图所示:
L0 - 无自动化
驾驶员完全负责车辆的操控,系统只实现报警、提醒类功能,不做任何的车辆控制。在使用L0驾驶辅助功能时,驾驶员需要全神贯注地驾驶车辆,借助L0系统的提示,提前识别环境风险,提升驾驶的安全性。
典型功能:
FCW(Forward Collision Warning,前向碰撞预警),通过摄像头或者雷达识别前向目标,当识别到有碰撞风险时,通过声音或者震动的方式,提示驾驶员。
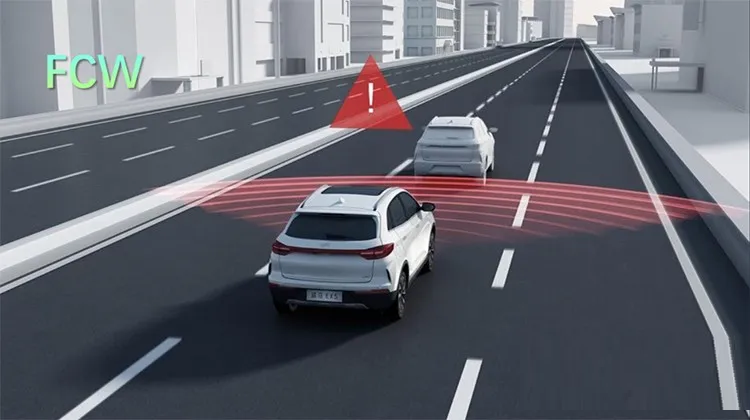
图片来源:威马
LDW(Lane Departure Warning,车道偏离预警),LDW系统通过摄像头监测车道线,当车辆无意识地偏离车道时,系统会发出警告,提醒驾驶员注意车道位置。

图片来源:威马
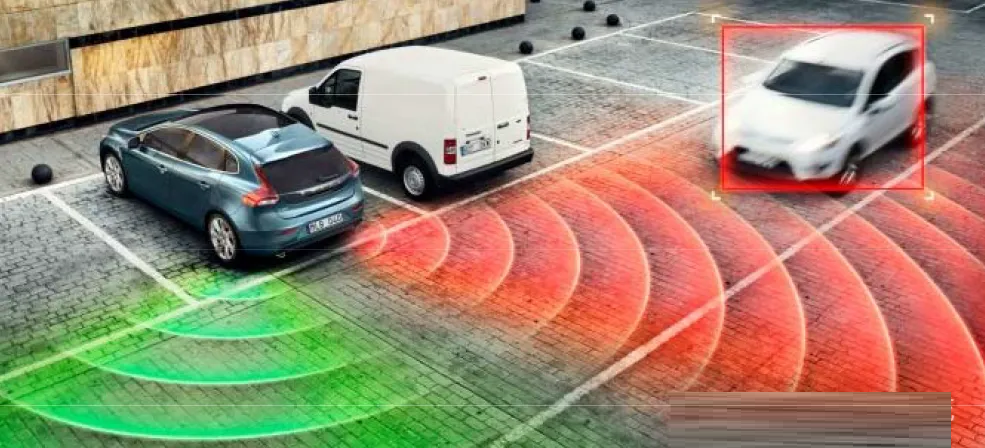
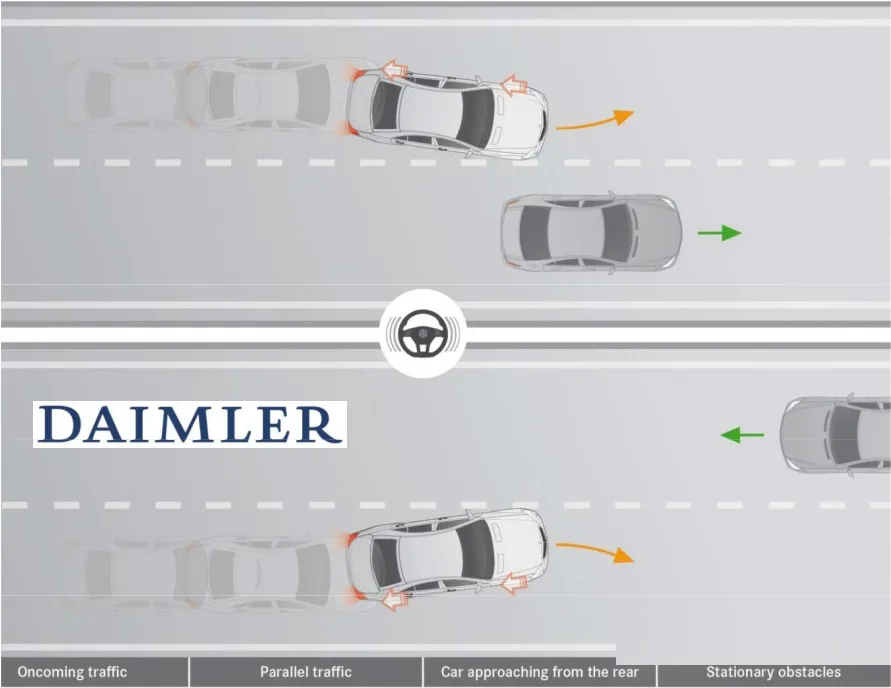
BSD(Blind Spot Detection,盲点监测系统),BSD持续监测盲区,如果有车辆位于车辆盲区时,BSD将点亮盲区警告指示灯和组合仪表获得相关警告提示。如果有车辆目标在盲区中,驾驶员打转向灯,一般情况下BSD会进行升级报警,一般是指示灯闪烁,或者增加声音报警。
LCA(Lane Change Alert,变线警告),当驾驶员向一侧车道变道时,LCA监测该车道后方快速接近本车的车辆,如果有碰撞风险,则LCA通过报警的方式提示驾驶员。

图片来源:Carhs
DOW(Door Open Warning,开门报警),DOW持续监测自车两侧后方目标,当有行人或者车辆快速接近时,DOW进行提示或者报警,以避免开门时发生碰撞。
FCTA(Front Cross Traffic Alert,前方穿行交通报警),当车辆在低速前进时,FCTA监测车辆前部接近的横向穿行道路使用者,当可能发生碰撞时,FCTA发出警告信息。
RCTA(Rear Cross Traffic Alert,后方穿行交通报警),和FCTA功能类似,只不过RCTA是监测车辆后方的横穿目标。
图片来源:VOLVO
360影像或者倒车影像,由环视摄像头或者后视摄像头实现。
低速碰撞预警,由超声波雷达检测车辆和周围目标距离,当距离过近时,发出声音提示。
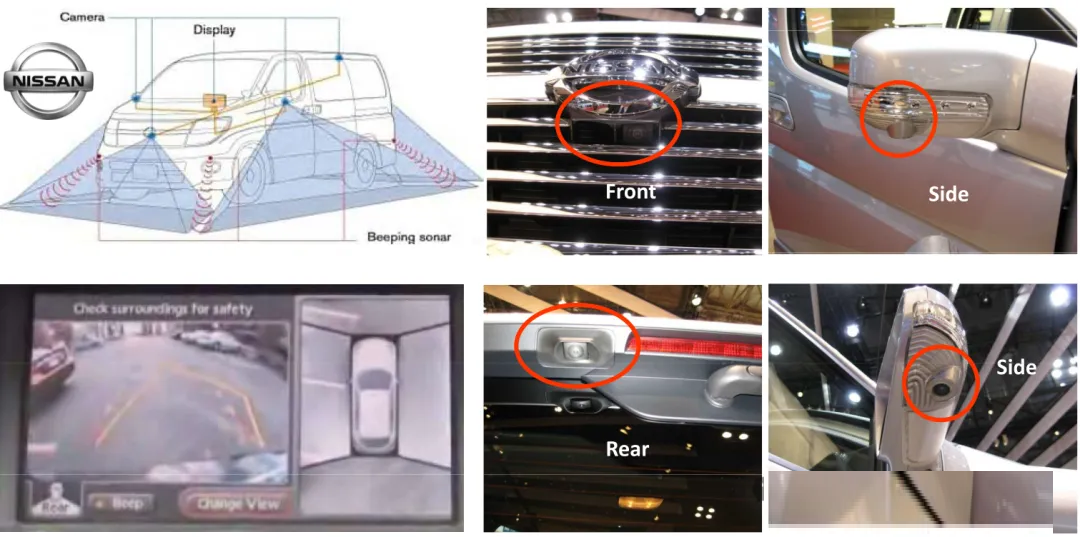
图片来源:NISSAN
L1 - 驾驶员辅助
L1辅助驾驶系统可以提供纵向或者横向中的1个方向的自动控制,此时驾驶员仍然需要全程关注车辆状态和环境信息,不过可以不用踩加速/制动踏板,或者转动转向盘。L1辅助驾驶系统可以一定程度地降低驾驶员驾驶负荷,减轻驾驶疲劳。
典型功能:
CC(Cruise Control,巡航控制),一般也称为定速巡航,CC可以自动控制车辆在设定的速度下匀速行驶,驾驶员不需要踩加速踏板。该功能无法识别前方目标,无法自动减速。
ACC(Adaptive Cruise Control,自适应巡航控制),ACC可以自动控制车辆在设定的速度下匀速行驶,驾驶员不需要踩加速踏板。同时,ACC可以识别并跟随前方目标,并保持一个合适的安全距离。例如,当距离前方目标过近时,ACC控制自车自动减速,当前方目标到停止时,ACC也可以刹停自车,当前方目标再次启动时,ACC可以控制自车自动起步。
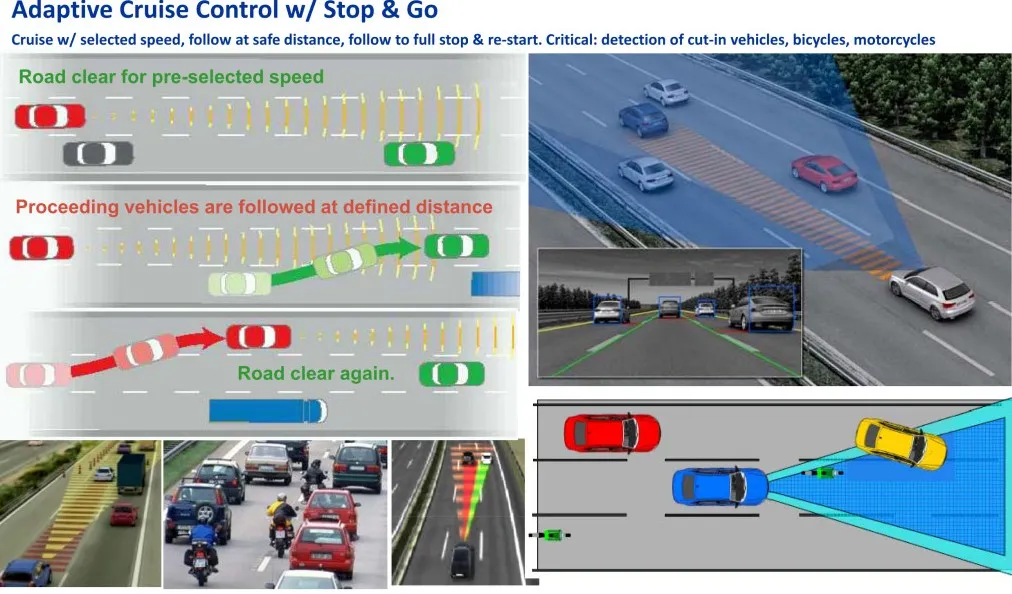
图片来源:Carhs
EBA(Emergency Breaking Assistant,紧急制动辅助),通过摄像头或者雷达识别前向目标,当识别到驾驶员的制动力不足,有碰撞风险时,通过施加辅助制动力,从而避免碰撞。
AEB(Autonomous Emergency Breaking,自动紧急制动),通过摄像头或者雷达识别前向目标,当识别到驾驶员的制动力不足或者完全没有制动动作时,有碰撞风险时,自动施加制动力,从而避免碰撞。
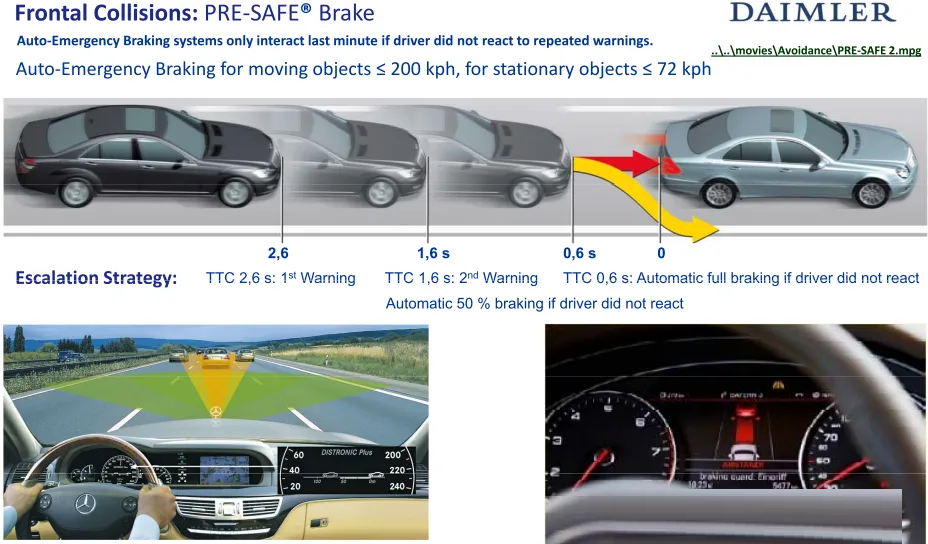
图片来源:戴姆勒
FCTB(Front Cross Traffic Braking,前方穿行交通制动),在车辆低速前进时,实时监测车辆前部横向接近的其他道路使用者,并在可能发生碰撞风险时自动启用车辆制动系统使车辆减速,以避免碰撞或减轻碰撞后果。
RCTB(Rear Cross Traffic Braking,后方穿行交通制动),和FCTB功能类似,只不过RCTA是监测车辆后方的横穿目标。
LDP(Lane Departure Prevention,道偏离预防系统),LDP是LDW的进阶版本,不仅提供预警,还能在必要时自动进行小幅度的转向调整,帮助车辆回到车道中心。LDP有时和ELK(Emergency
Line Keeping,紧急车道保持)是同一含义。
图片来源:戴姆勒
LKA(Lane Keeping Assist,车道保持辅助),LKA通过摄像头监测车道线,通过自动进行转向调整,控制车辆行驶在车道中间行驶。LKA有时和LKS(Lane
Keeping System,车道保持系统),以及LCC(Line Centering Control,车道居中辅助)是同一含义。

图片来源:奥迪
ALC(Automatic Line Change,自动变道辅助),ALC可以按照驾驶员的变道指令,自动控制车辆进行变道,ALC工作时,驾驶员仅需要拨动转向杆,之后的变道操作由ALC自动完成。
S-APA(Semi-Automatic Parking Assist,半自动泊车辅助),S-APA基于车辆的超声波传感器实现车位感知,向驾驶员提供车位信息,并进行路径规划,系统自动控制车辆转向系统,驾驶员仅需按照仪表盘的提示对车辆纵向进行控制(控制加速踏板和制动踏板即可)。半自动泊车需要驾驶员实时监督,并控制档位、加速和减速,对驾驶过程要求较高,且操作流程复杂,用户体验较差。
TSR(Traffic sign recognition,交通标志识别),TSR识别路边交通标志牌,例如限速标志和停止标志,如果自车车速过高,会警示驾驶员,或者自动控制车辆车速,达到速度限制要求。
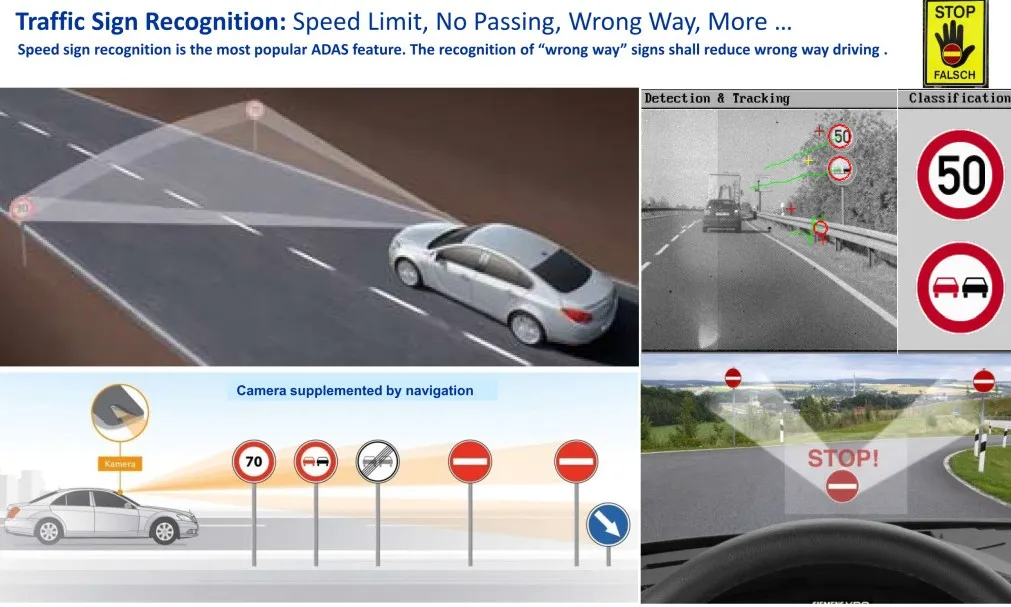
图片来源:Carhs
IHC(Intelligent High-beam Control,智能远光灯控制),也叫AHBC,Automated
High-Beam Control。在检测到对面有来车时,自动将自车的远光灯切换为近光灯,当对面来车通过后,再自动切换回远光灯。在更高级一些的车辆中,安装矩阵大灯,实现ADB(Adaptive
Driving Beam,自适应远光灯),可以实现更精确的前向照明控制。
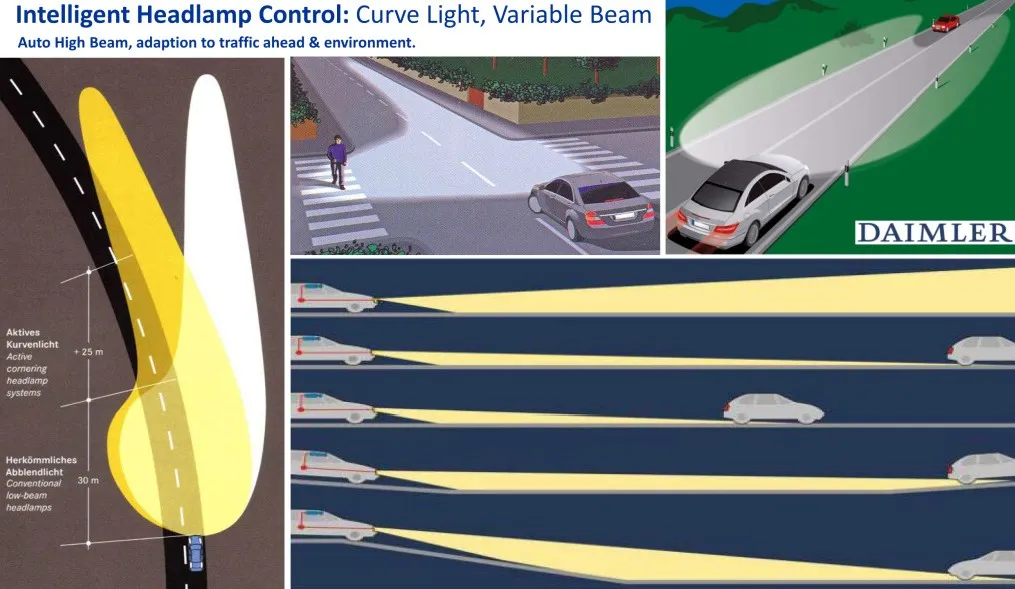
图片来源:戴姆勒
L2 - 部分自动化
L2辅助驾驶系统可以同时提供纵向和横向2个方向的自动控制,此时驾驶员不用控制踏板和方向盘,但仍然需要关注车辆状态和环境信息,眼睛需要实时观察路况,手不可以离开方向盘。L2辅助驾驶系统进一步降低驾驶员驾驶负荷,提升驾驶舒适性,不过在L2系统无法应对所有环境,驾驶员需要“随时”接管。
典型功能:
TJA(Traffic Jam Assistant,交通拥堵辅助),TJA可以在60kph以下的堵车工况,为驾驶员提供一定的辅助系统,通过同时控制车辆纵向和横向运动,自动跟车,缓解驾驶员的疲劳。
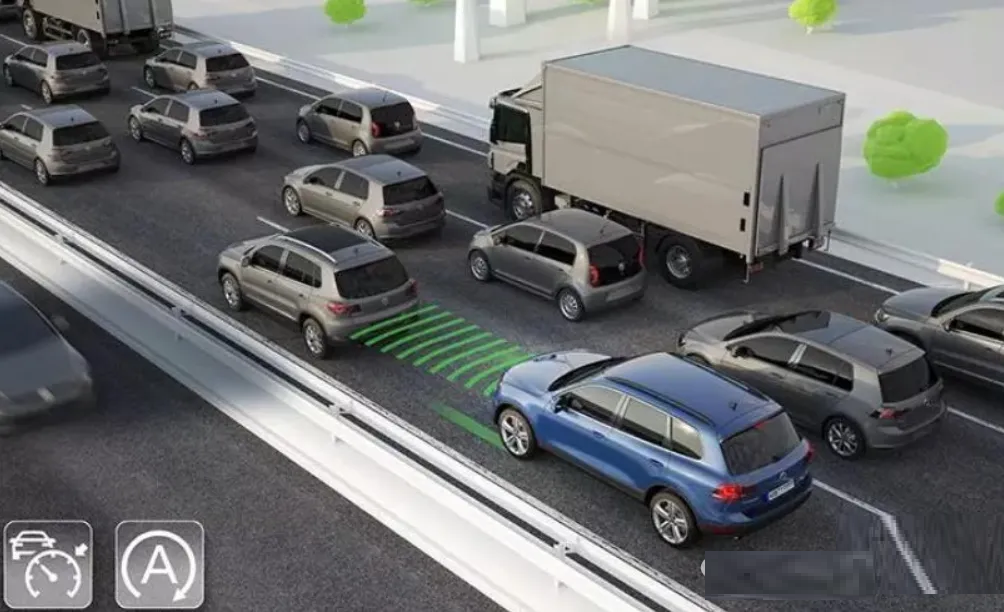
图片来源:网络
HWA(High Way Assistant,高速公路辅助),和TJA类似,只不过HWA是工作在60kph以上,同时控制车辆纵向和横向运动,控制车辆保持在车道内居中行驶,当前方有车辆时,可以自动保持安全距离。HWA和ICA(Integrated
Cruise Assist,集成式巡航辅助系统)含义相同。
ICC(Integrated Adaptive Cruise Control,智能自适应巡航),可以认为是HWA和TJA的结合,可以在全车速范围内同时控制车辆的纵向运动和横向运动。
NOA(Navigate on Autopilot,自动辅助导航驾驶),NOA在ICC的基础上,增加了自动变道、自动进出匝道功能,是目前等级较高的L2自动驾驶功能。目前各家对NOA的名称稍有区别,例如特斯拉/理想/智己是NOA,小鹏是XNGP,蔚来是NOP,长城是NOH等。
根据应用场景不同,可以在快速路上使用的NOA称为高速NOA:

可以在城区道路使用的,称为城区NOA。城区由于环境更为复杂,因此城区NOA的实现难度要高于高速NOA。

记忆行车,或者通勤模式。在不依赖高精地图的情况下,通过在线实时感知,对固定路线进行记忆,之后可以使用该路线进行自动驾驶功能。该功能由于使用了“记忆路线”,实现难度比城市NOA稍低。
APA(Automatic Parking Assist,全自动泊车系统),APA可以实现对车辆的横向和纵向控制,自动完成泊车操作,驾驶员只需监控和特定情况下接管即可。按照传感器组成的不同,全自动泊车分为基于超声波雷达的全自动泊车、基于超声波与视觉融合的全自动融合泊车。APA还有一种产品形态是RPA(Remote
Parking Assist,遥控泊车)。RPA在APA 的基础上增加了遥控部分,允许驾驶员在车外一定可视范围内使用遥控装置(手机APP或遥控钥匙)控制车辆实现泊入、泊出、直进、直出等功能。

L3 - 有限自动化
L3级自动驾驶功能可以在某些特定条件下,完全承担驾驶任务,但在系统失效或者系统无法应对的复杂环境时,驾驶员需要进行接管控制。在L3系统激活时,驾驶员可以将注意力暂时转移到其他事务,眼睛可以不看前方,手可以不放置在方向盘上,但是不能睡觉,需要在系统提示,对车辆进行接管。
从L3级开始,车辆事故责任的认定会出现明显的不同。
对于L0~L2的驾驶辅助系统,在任何情况下,责任都由驾驶员承担。而在L3功能激活时,以及在一定的接管时间内(一般是10s),车辆责任由L3辅助驾驶系统承担,其他时间的责任由驾驶员承担。
典型功能:
TJP(Traffic Jam Pilot,交通拥堵领航),功能和TJA类似,只不过功能激活时,驾驶员不再需要关注路面。

图片来源:BMW
HWP(High Way Pilot,高速公路领航),功能和HWA类似,只不过功能激活时,驾驶员不再需要关注路面。
VPA(Valet Parking Assist,记忆泊车),VPA可以按照用户设定的路线,辅助驾驶员将车辆从设定路线的起点,开往设定路线的终点,期间可以实现智能调节车速、转弯、绕行障碍物、会车、停车避让行人以及避让出入库车辆等功能,并泊入终点附近已被系统记忆的车位。记忆泊车系统应用区域不需要提前采集高精地图,适用于高频、高重复性的泊车行为。(注意:有些厂家的VPA功能要求驾驶员时刻注视路面,此时VPA仍然为L2功能)
L4 - 高度自动化
L4级别自动驾驶车辆能够在特定的环境和条件下,完全自主地执行驾驶任务,而无需驾驶员的干预。
但在某些情况下,例如系统故障、天气恶劣或交通状况复杂时,可能需要驾驶员接管控制,驾驶员可以根据情况判断是否需要接管。如果驾驶员不接管,L4系统所具备的冗余系统也可以实现继续驾驶或者安全停车。在任何驾驶员没有接管车辆的时间中,车辆责任均由L4自动驾驶系统承担。
L4车辆在运行时,驾驶员可以不在车内。
L4级别自动驾驶功能(图片来源:网络)
典型功能:
AVP(Automated Valet Parking,自主代客泊车),AVP系统工作时,用户在指定点下车,通过手机下达泊车指令,车辆在收到指令后,自动行驶到停车位,不需要用户操纵与监控。用户通过手机下达取车指令,车辆在接收到指令后可以从停车位自动行驶到指定上客点,该功能也被称为召唤(summon)。AVP最显著的特点是车内无人,车辆自动完成行驶、泊入和泊出动作。
BOSCH和奔驰研发的AVP系统:
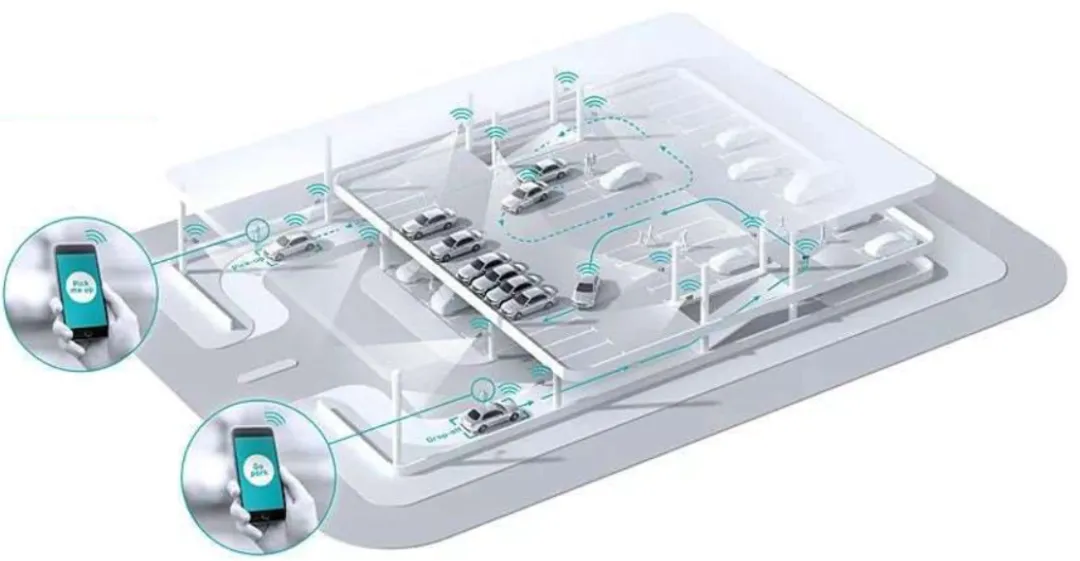
图片来源:BOSCH、奔驰
TESLA的召唤功能:

图片来源:TESLA
L5 - 完全自动化
这是最高级别的自动驾驶功能,车辆完全能够在任何条件下执行所有驾驶任务,无需驾驶员介入。
L5级别的自动驾驶汽车没有方向盘和加速制动踏板:

图片来源:网络
目前还没有任何车辆可以实现L5级别自动驾驶功能。
02
系统方案
一个完整的自动驾驶系统一般包括“云端”和“车端”:

图片来源:亿欧智库
本文主要介绍自动驾驶“车端”的系统架构,主要是感知和决策部分(这部分通常被认为是自动驾驶系统的核心),其他内容会在后续文章中再详细展开。
L0-L4级别自动驾驶传感器和执行器的一般应用方案:
1)L0和L1系统方案
L0和L1系统发展较早,功能相对简单,因此这类系统的感知和控制一般由一个电子控制器完成。感知器件主要以毫米波雷达、超声波雷达和摄像头为主。
主要架构示意如下:
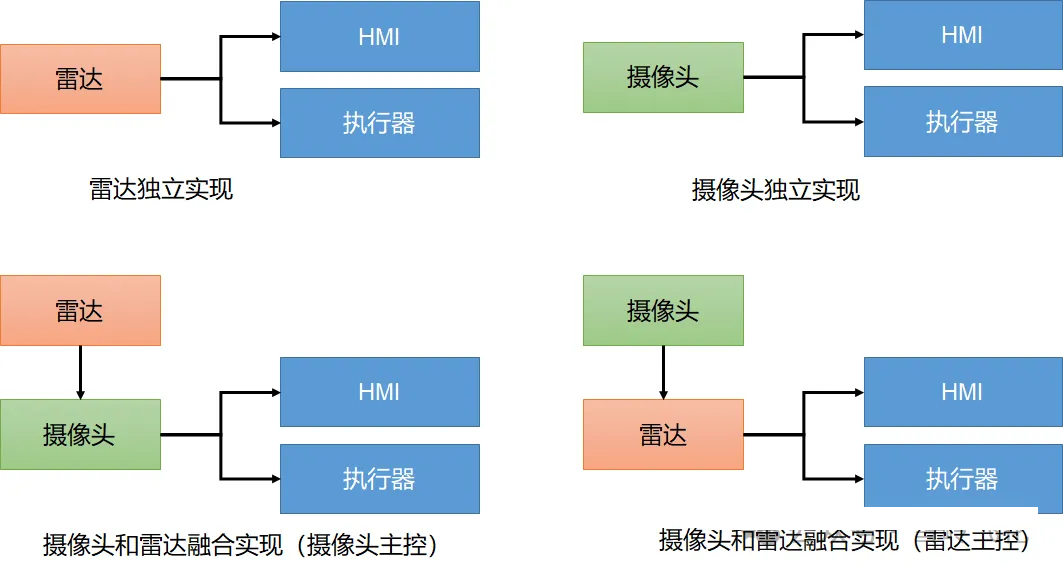
例如,BSD主要由毫米波雷达实现,常见的基本架构如下:

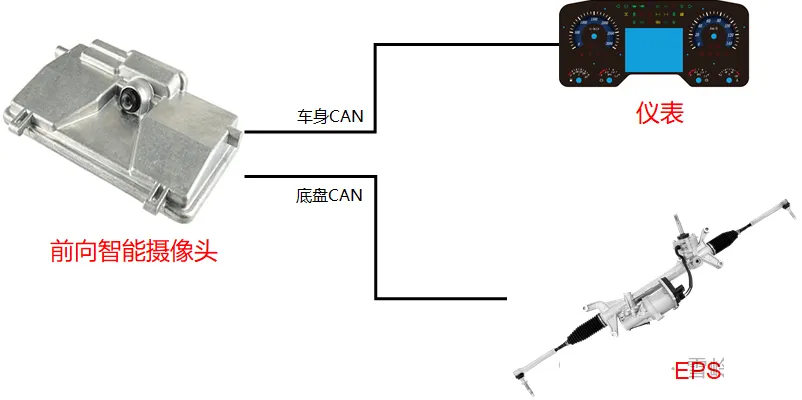
LKA主要由摄像头实现,常见的基本架构如下:
2)L2系统方案
L2系统方案目前并不完全统一,在感知单元的配置方案以及域控制器的芯片选择上有所不同,主要取决于L2系统支持功能的多少,以及技术路线的不同。
L2系统的感知单元通常按照下面方式布置(实际情况会有所增减):
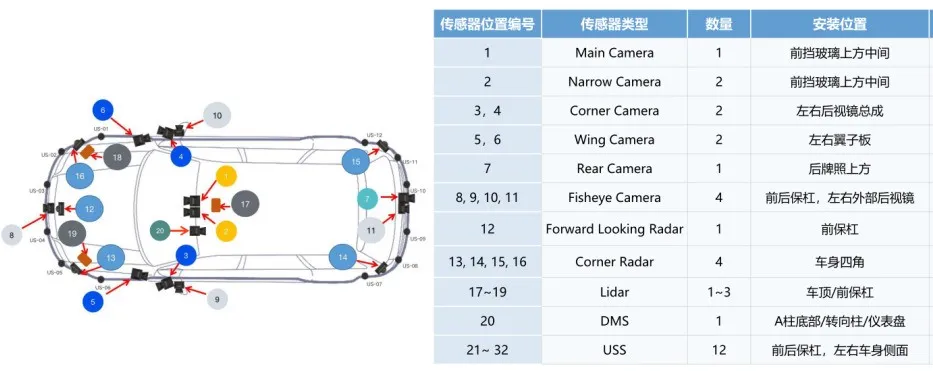
图片来源:安波福
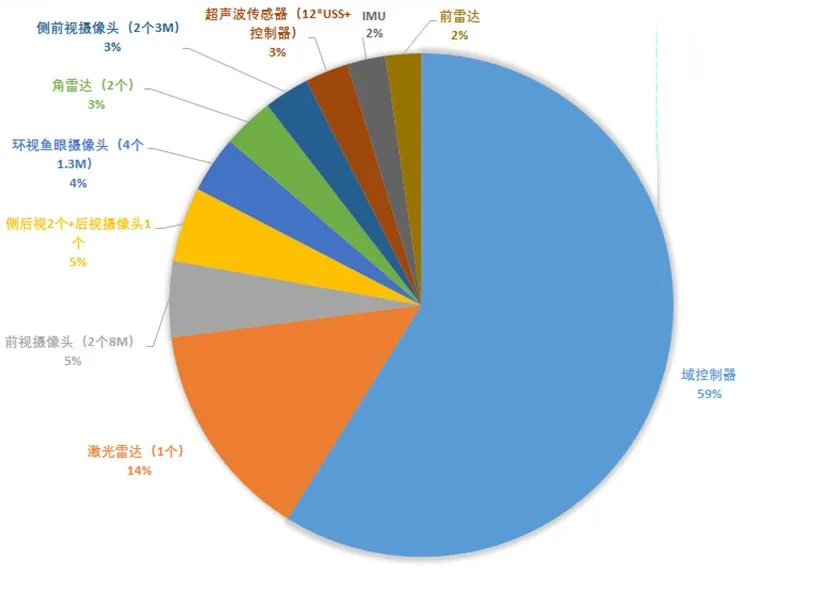
L2自动驾驶系统的感知和控制单元BOM成本大概在1~2万RMB左右,比例大致如下(由于方案的不同,成本和占比有可能差异较大):
2.1)特斯拉
特斯拉的自动驾驶系统经历了从1.0、2.0、2.5、3.0,直至最新4.0的发展历程。其中HW1.0~3.0的系统配置如下:
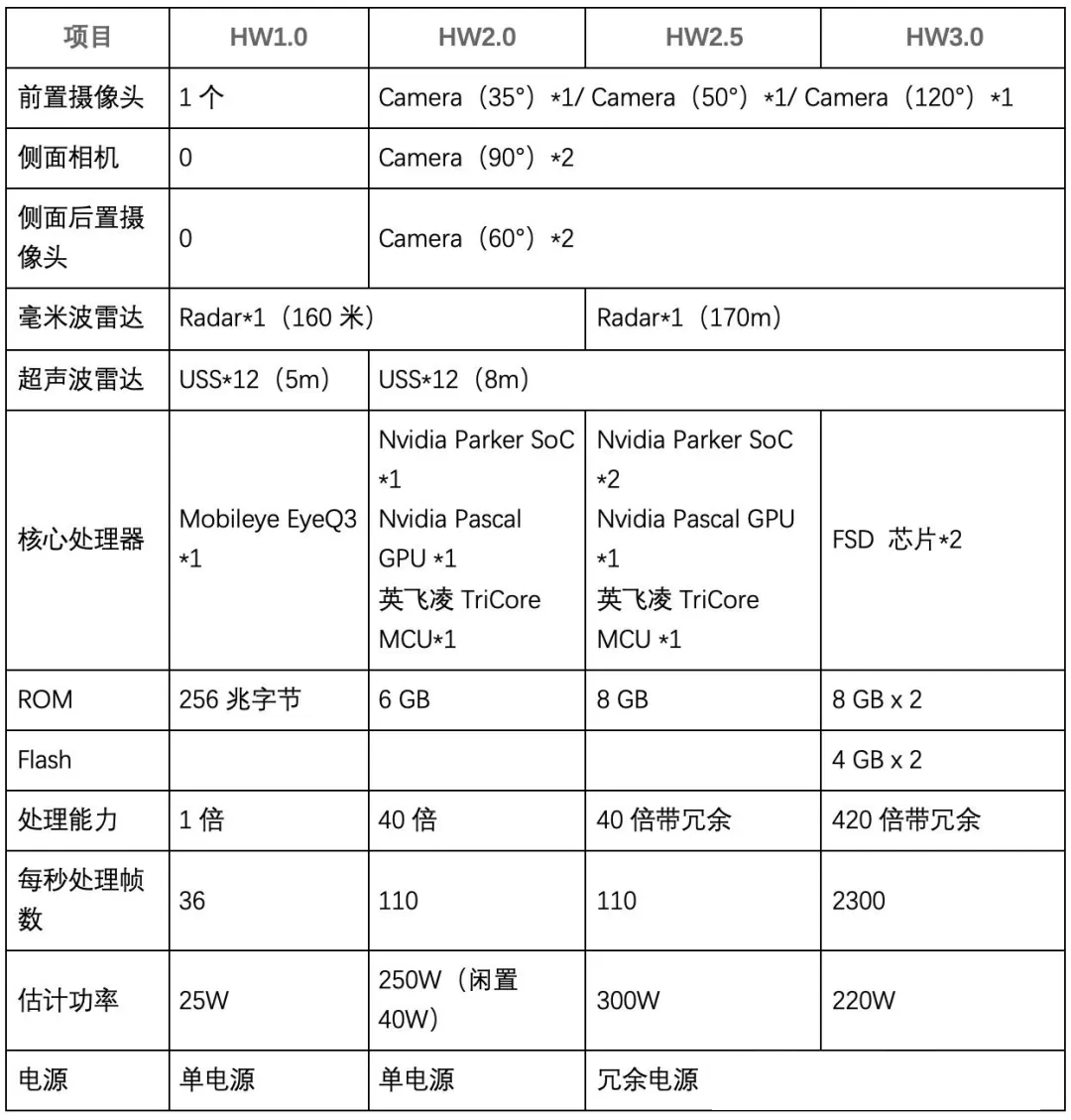
特斯拉在HW3.0进行了硬件的重大革新,首次采用了自研的自动驾驶芯片FSD。
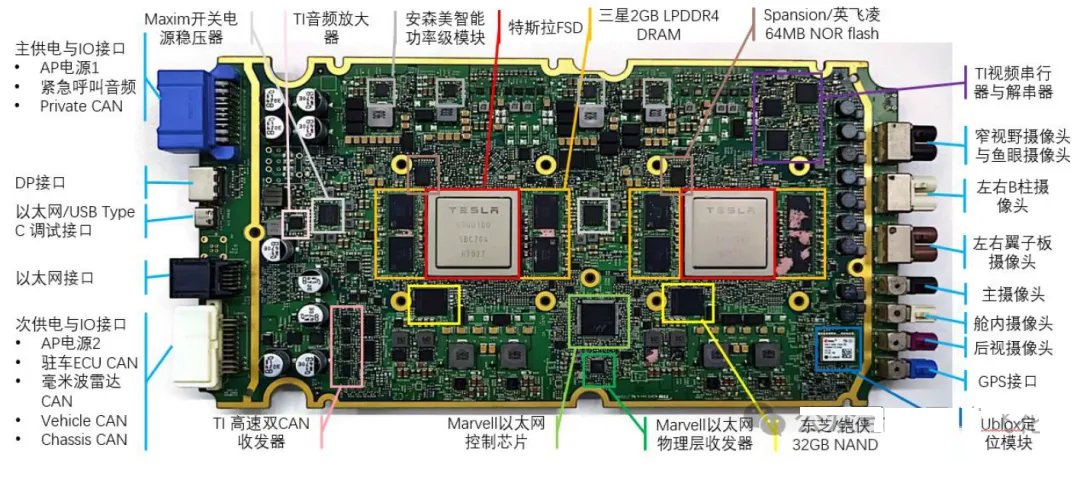
资料来源:中城康帕斯科技发展(深圳)有限公司,中信证券研究部,TESLA
HW 3.0的传感器配置:
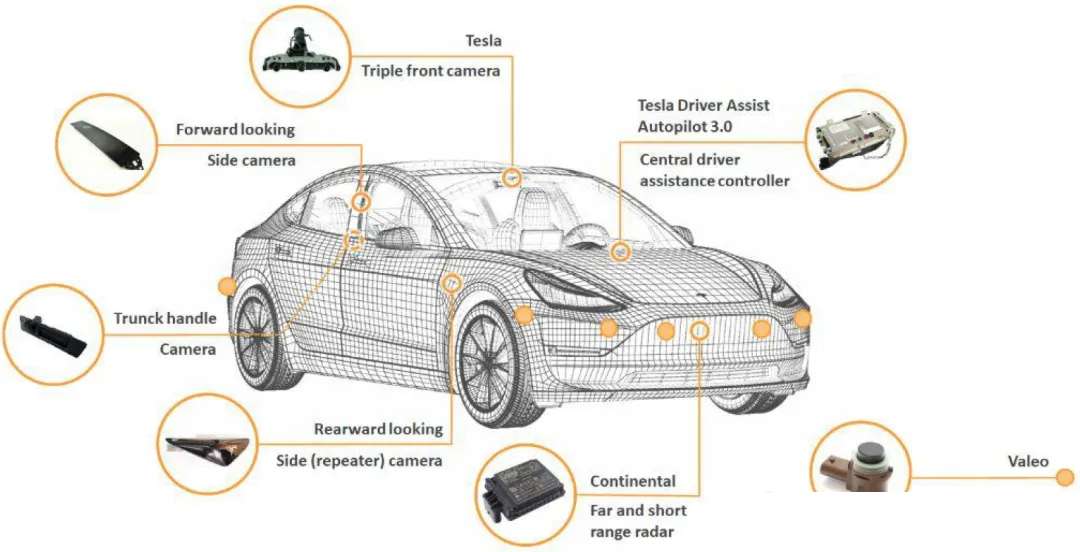
图片来源:特斯拉
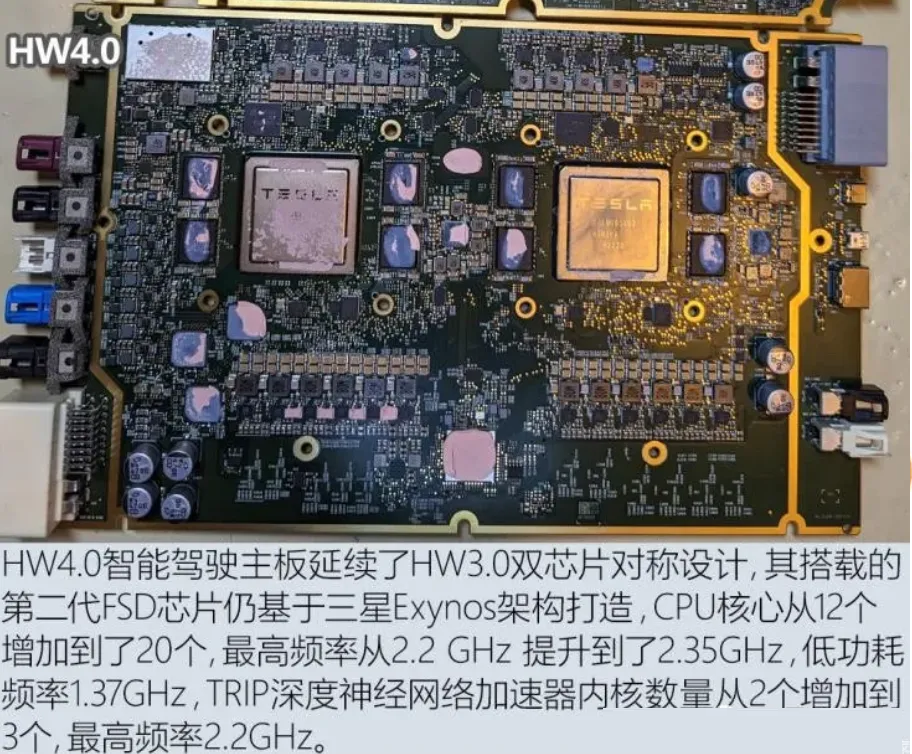
特斯拉HW 4.0域控制器依然采用2片FSD芯片,性能比上一代有所提升。
特斯拉自动驾驶功能的迭代进程:
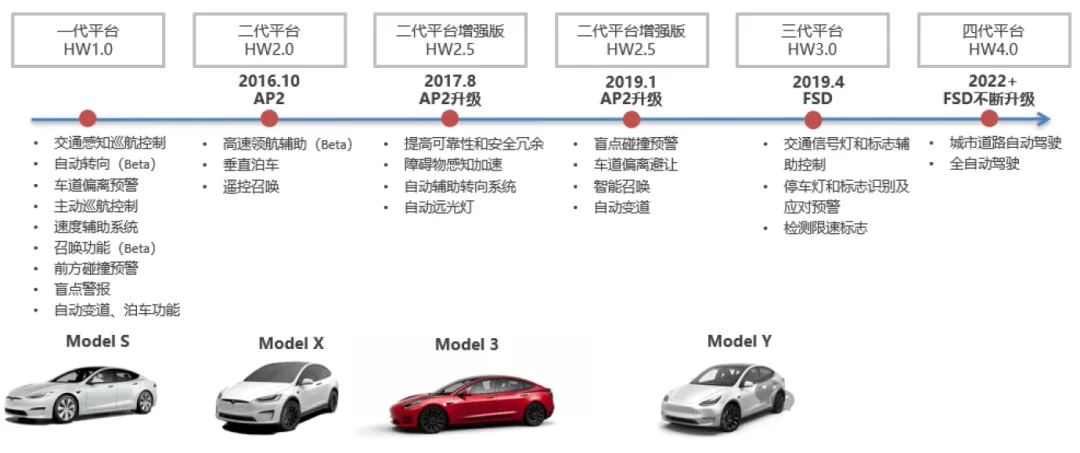
图片来源:基于网络数据整理
目前,特斯拉Autopilot选装包共有三种:
基础版 Autopilot(BAP),针对全系车型免费,主要实现主动安全和主动巡航等基本功能;
增强版自动辅助驾驶(EAP),主要包含:自动辅助变道、高速NOA、APA、智能召唤等;
完全自动驾驶(FSD),可以实现全部自动驾驶功能;
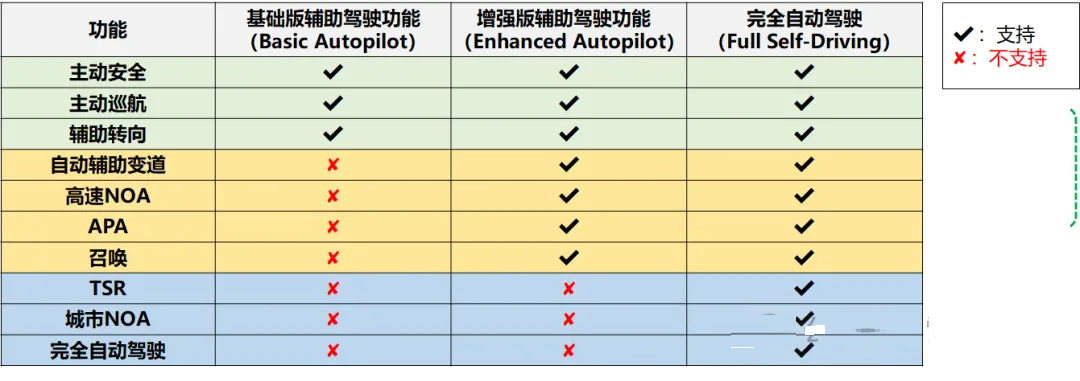
目前由于数据的问题,特斯在国内还无法使用FSD功能。不过近期频繁传出特斯拉在国内即将落地FSD的消息,非常期待FSD在国内可以落地使用,终于可以和华为、小鹏等国内自动驾驶头部品牌做正面PK。
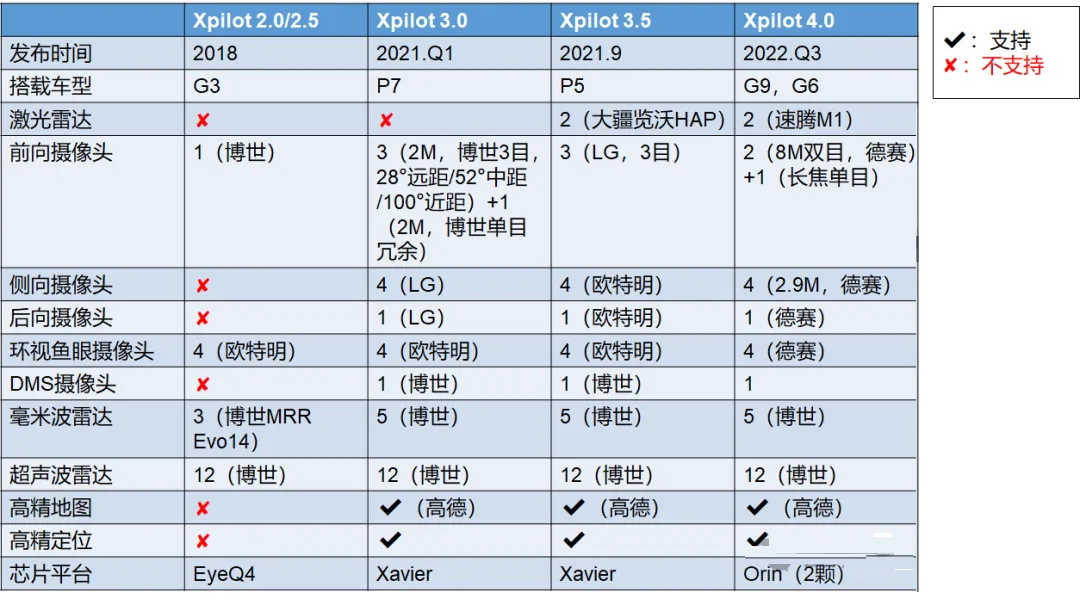
2.2)小鹏
2018年,小鹏首个自动驾驶系统Xpilot 2.0在小鹏G3上首发。此后,小鹏汽车通过OTA为小鹏G3开放了TJA、ACC、ALC等智能驾驶能力,进入XPilot
2.5。
2021年1月,XPilot 3.0在P7智尊版以及鹏翼版首发,开放NGP。
2021年9月,XPilot 3.5在P5上发布。
2022年Q3,XPilot 4.0发布,搭载在G9和G6。
XPilot具体系统方案如下:
小鹏自动驾驶功能的迭代进程:

图片来源:基于网络数据整理
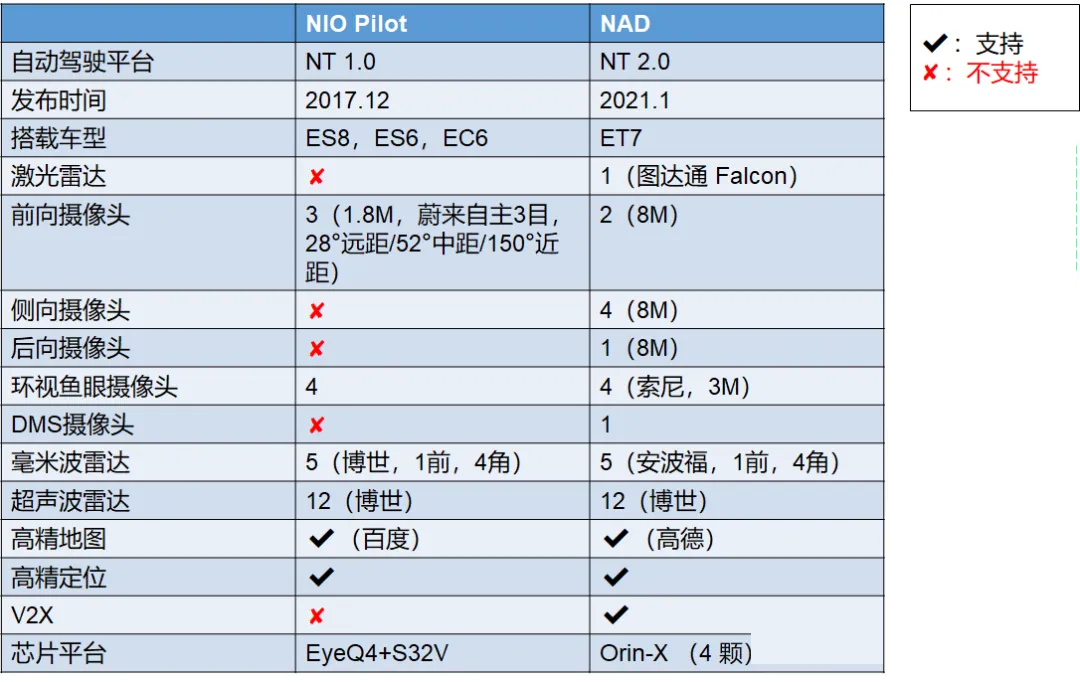
2.3)蔚来
2017年12月,蔚来首次发布驾驶辅助系统 NIO Pilot,并搭载于 ES8,ES6,EC6 三款车型。
2021年1月,蔚来发布自动驾驶系统NAD,包含NIO Aquila蔚来超感系统和NIO Adam蔚来超算平台,建立了全栈自动驾驶技术能力。
具体系统方案如下:
NIO Adam蔚来超算平台:
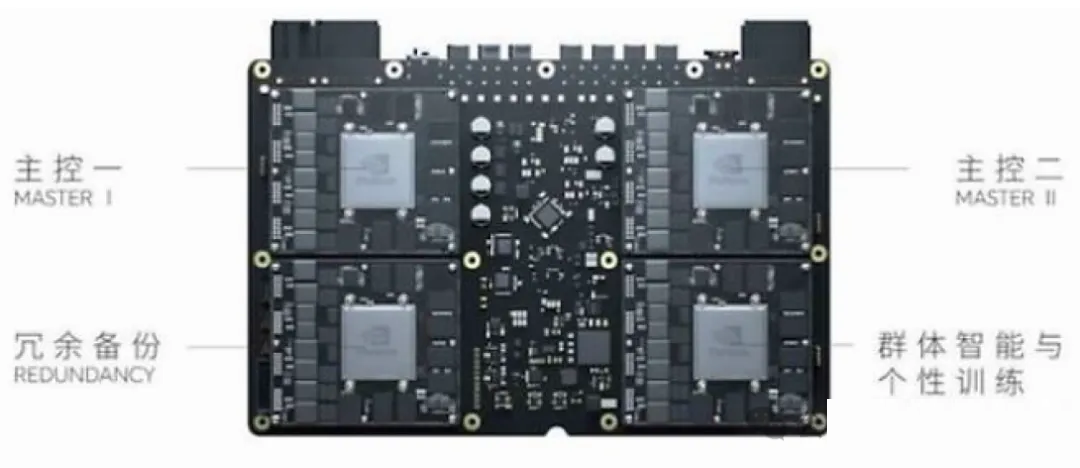
图片来源:蔚来
NIO Adam平台采用了4颗英伟达Orin-X,算力合计1016TOPS,4颗芯片分工如下:
2颗主控:实现NAD算法的全栈运算,包含多方案相互校验感知,多源的高精度定位,多模态的预测与决策;
1颗冗余备份:任何一个主芯片失效,使用这颗冗余芯片以确保安全;
1颗群体智能与个性训练专用:可以加快NAD的进化进度,同时又可以针对每个用户的用车环境进行个性化的本地训练,提升每位用户的自动驾驶体验。
NIO Adam平台的电源、影像和主控系统均采用了热备份设计。
蔚来自动驾驶功能的迭代路径:
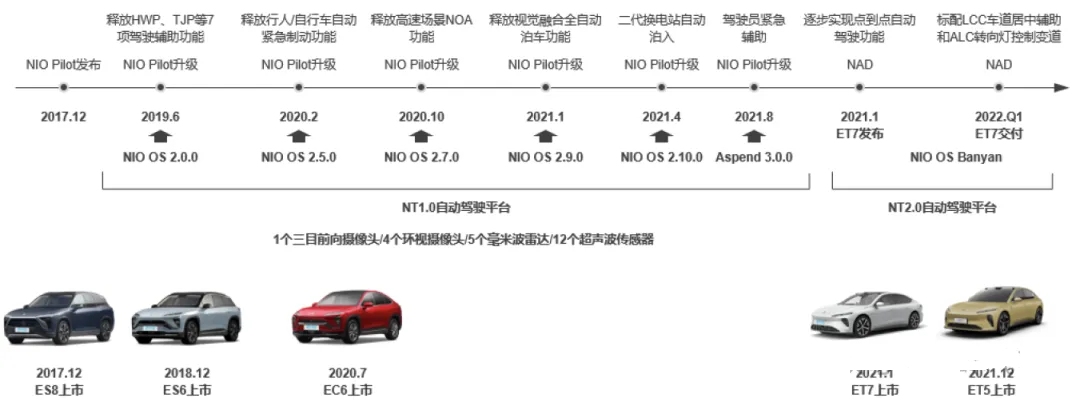
图片来源:基于网络数据整理
2.4)理想
2019年,理想ONE标配辅助驾驶系统,采用EyeQ4,主要实现基本L2级驾驶辅助功能。
在2021款理想One和L9上,分别部署了理想AD和AD Max自动驾驶系统,相关硬件配置进行了升级。
具体系统方案如下:
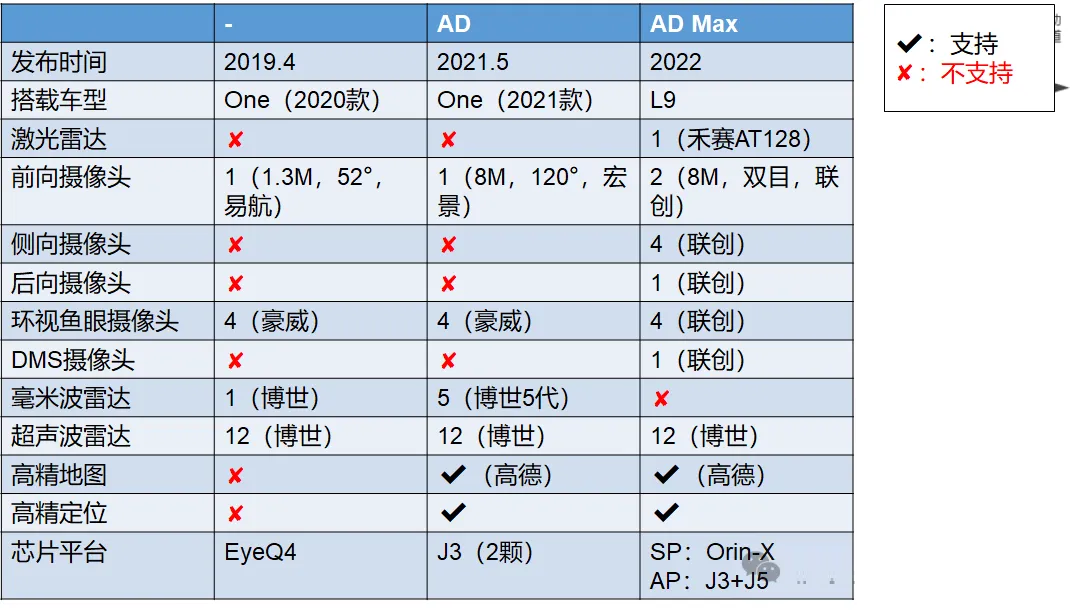
理想自动驾驶功能迭代路径:
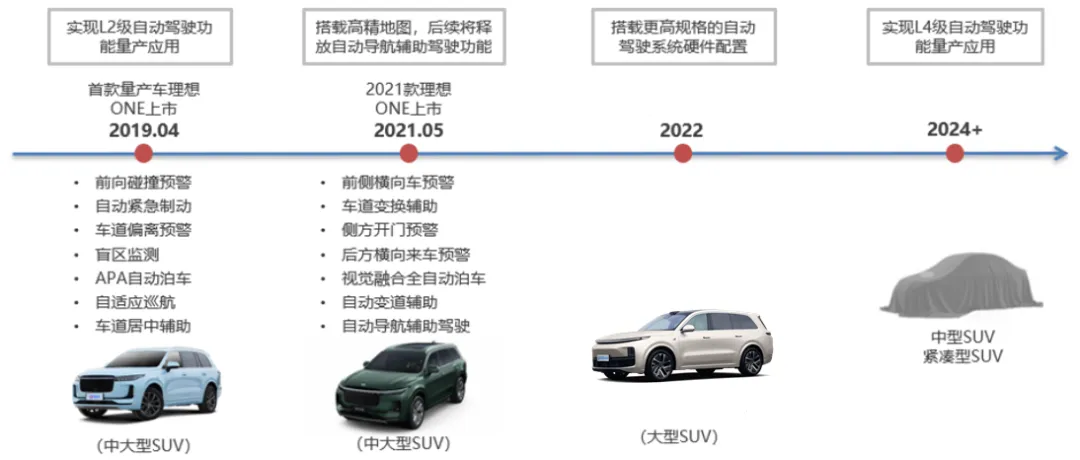
图片来源:基于网络数据整理
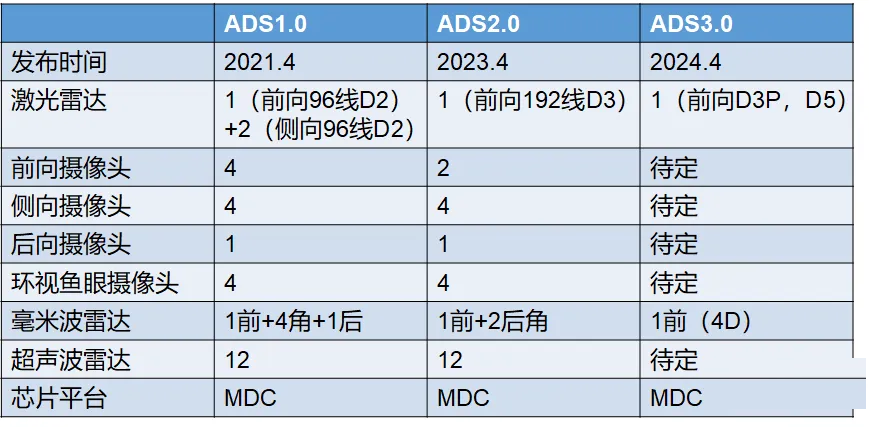
2.5)华为
华为智能汽车解决方案布局如下所示:

图片来源:华为
华为智能驾驶汽车中包含四个核心子系统:计算平台、传感器、执行器与应用算法。
其中,自动驾驶计算平台是华为MDC:

图片来源:华为
具体系统方案如下:
2.6)其他
其他还有许多厂家有自己的L2系统方案,例如Momenta、大疆、元戎启行等,这些放到后面文章中再仔细展开。
3)L3系统方案
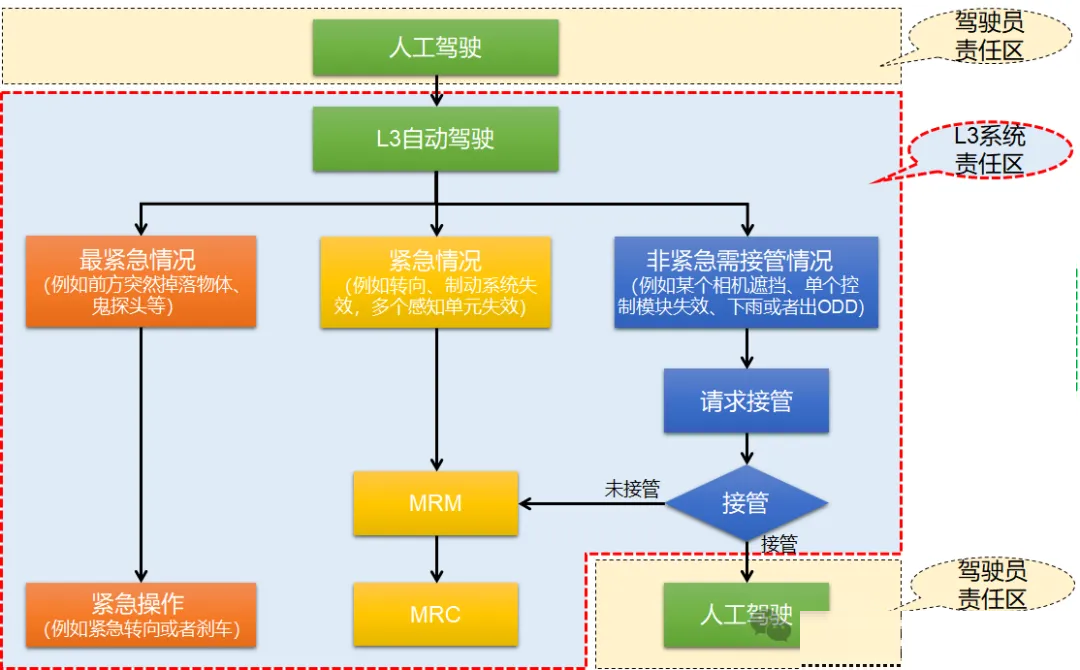
L3系统在激活之后(驾驶员未接管前),安全责任将由L3系统承担,因此安全设计对于L3系统来说非常重要。
L3系统的工作过程和安全责任分工如下:
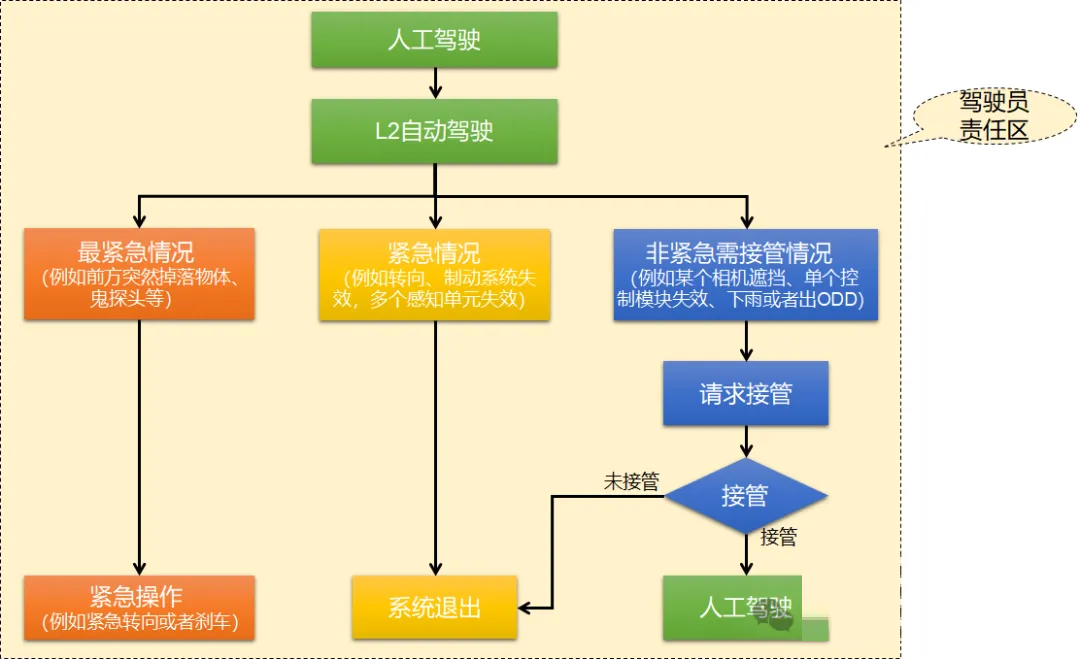
相对应的,对于L2系统:
L3系统安全主要是考虑2点:1)当系统没有失效时,如何保证安全(预期功能安全);2)当系统存在失效时,如何保证安全(功能安全)。
因此为了保证充分的安全性,在L3的系统设计中,往往需要进行大量的冗余设计,包括感知冗余、控制冗余和执行冗余。因此L3系统的复杂性往往远高于L2系统。
(由于篇幅原因,本文只主要介绍主流厂家的L3系统方案。下一篇内容单独介绍L3系统的冗余原理和设计要点。)
3.1)BMW
2020年,宝马公布了其SAE L3系统的概念系统架构,称为hPAD。
宝马的L3系统ODD是:封闭道路(例如有清晰车道线的高速公路,不包括匝道),晴天(光照>50
lux),车速低于60km/h,可激活城市限制,驾驶员需要坐在座位上(不能睡觉)。

宝马强调多样化冗余的必要性,主通道和辅助通道本身都是冗余的,并且有自己的诊断单元。如果故障同时影响主通道和辅助通道,则第三个安全通道接管(SAFE
Fail-Degraded Channel),以达到最小风险条件。
BMW L3的架构思路:
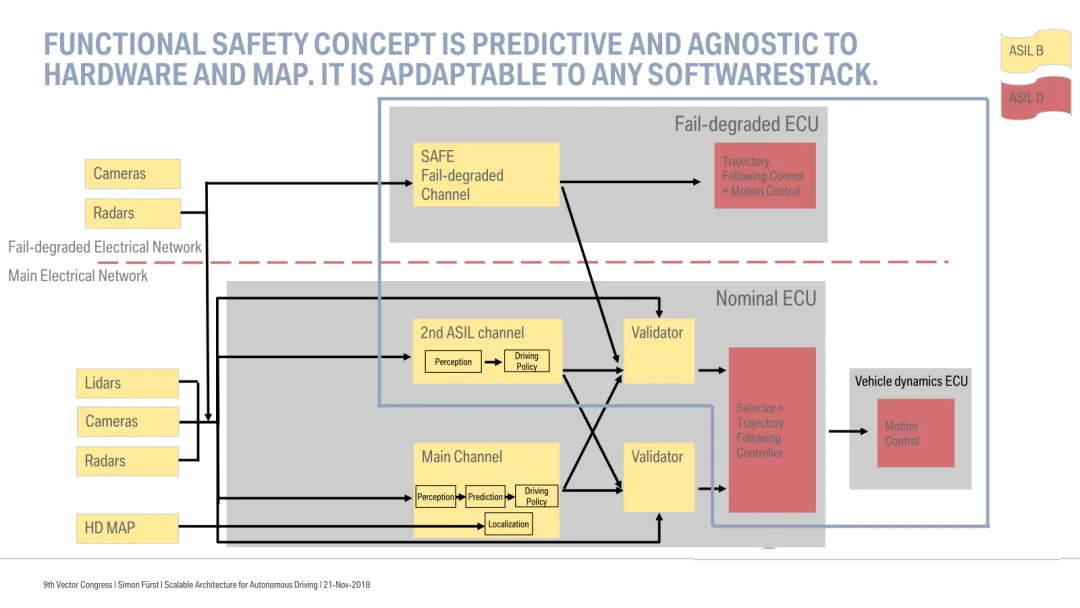
图片来源:BMW
宝马的L3架构采用类似Doer/Checker/Fallback架构。其中,“MAIN”通道类似于“Doer”,“SAFE”通道类似于“Checker”,而“SAFE
fail-degraded”通道类似于“Fallback”。宝马的L3架构属于非对称通道级冗余架构,并采用了Doer/Checker以及Active
and Standby的安全设计方法。
BMW的传感器接入方案:
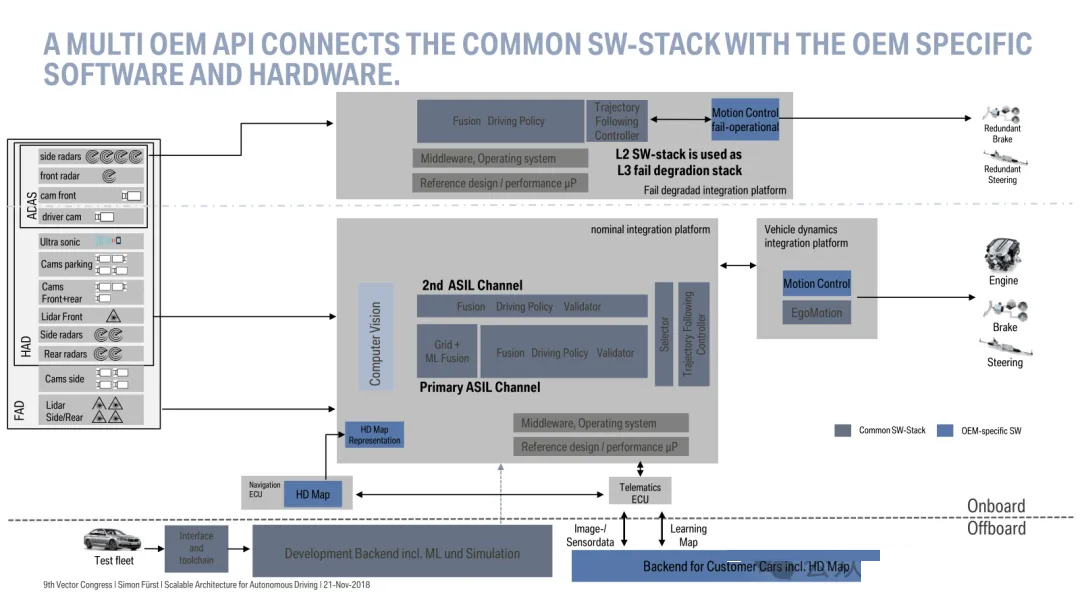
图片来源:BMW
BMW的控制器芯片方案:
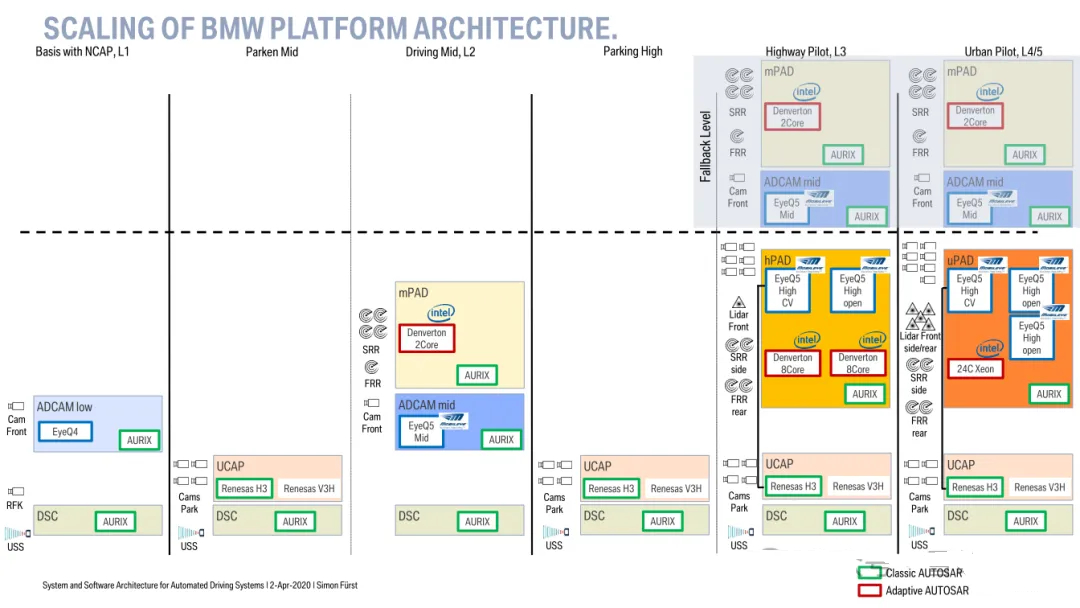
图片来源:BMW
3.2)Mobileye
Mobileye采用被动传感器系统(Camera)以及主动传感器系统(Radar+Lidar)双冗余系统设计。正常情况下,两个子系统融合工作,实现异构传感器最大程度的优势互补,当失效时,每个子系统都可以独立工作。
Mobileye的L3设计思路:
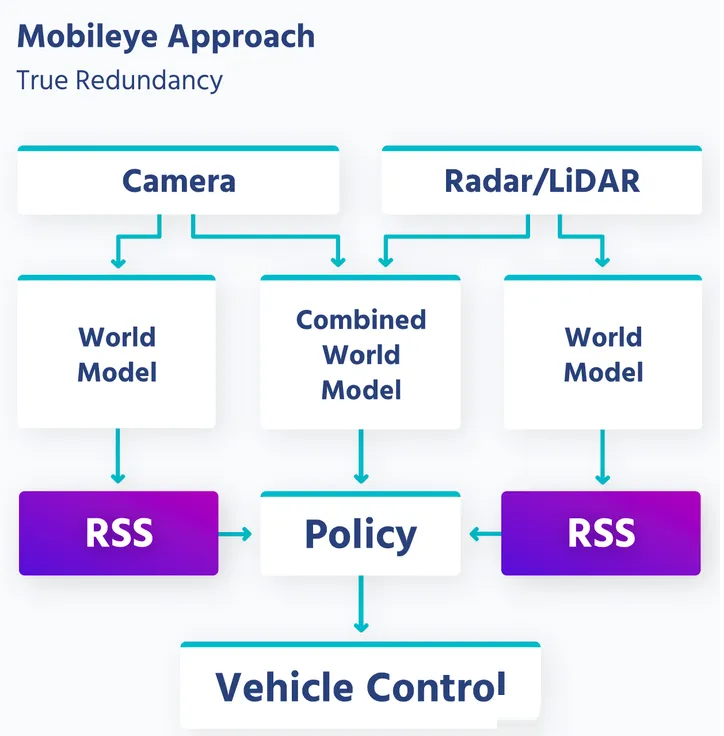
图片来源:Mobileye
两个独立子系统的传感器配置:
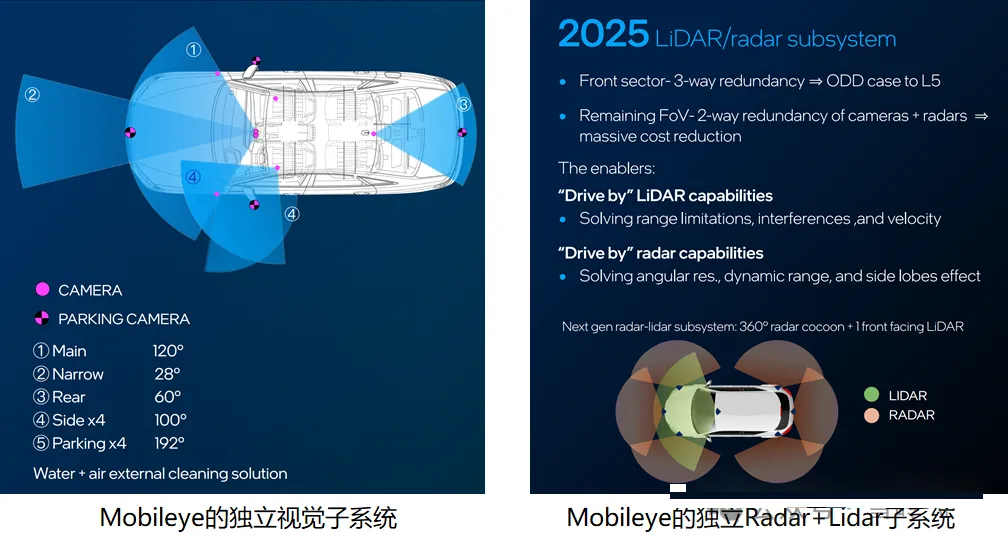
图片来源:Mobileye
Mobileye的L3系统架构:
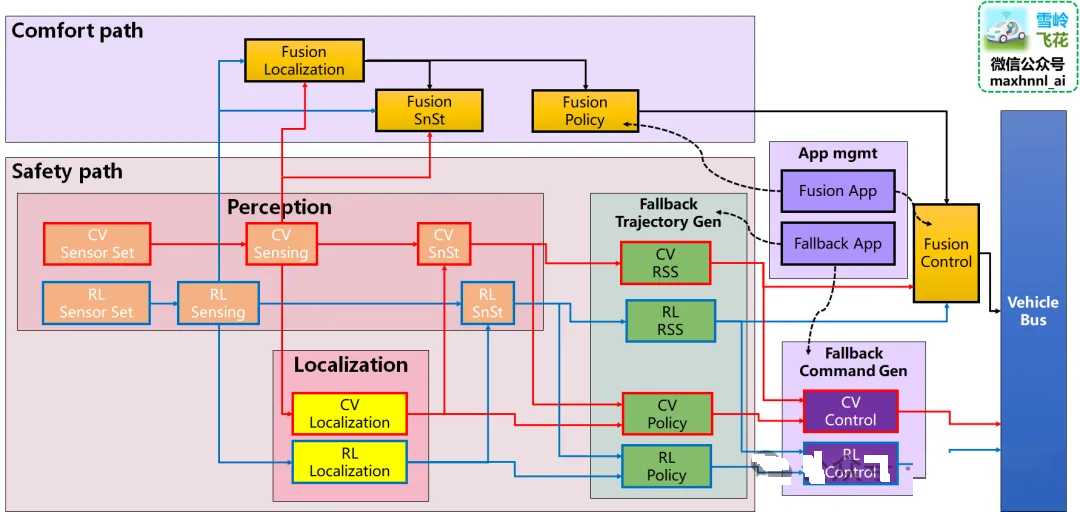
Mobileye的L3方案采用“舒适通道”和“安全通道”方案,其中“舒适通道”采用全量的视觉、毫米波雷达和激光雷达信息,通过融合综合所有传感器的信号,进行车辆控制。该通道是系统正常时的工作模式。
“安全通道”校验舒适通道的工作状态,如发现异常,则将自动驾驶系统由“舒适通道”切换为“安全通道”。“安全通道”分别由相互独立的“视觉冗余通道”和“雷达冗余通道”组成,前者主要基于视觉进行独立的识别、定位和车辆控制,后者主要基于激光雷达和毫米波雷达进行独立的识别、定位和车辆控制。
在硬件部署方面,域控制器采用两块板子,集成在一个控制器盒子中,如下所示:
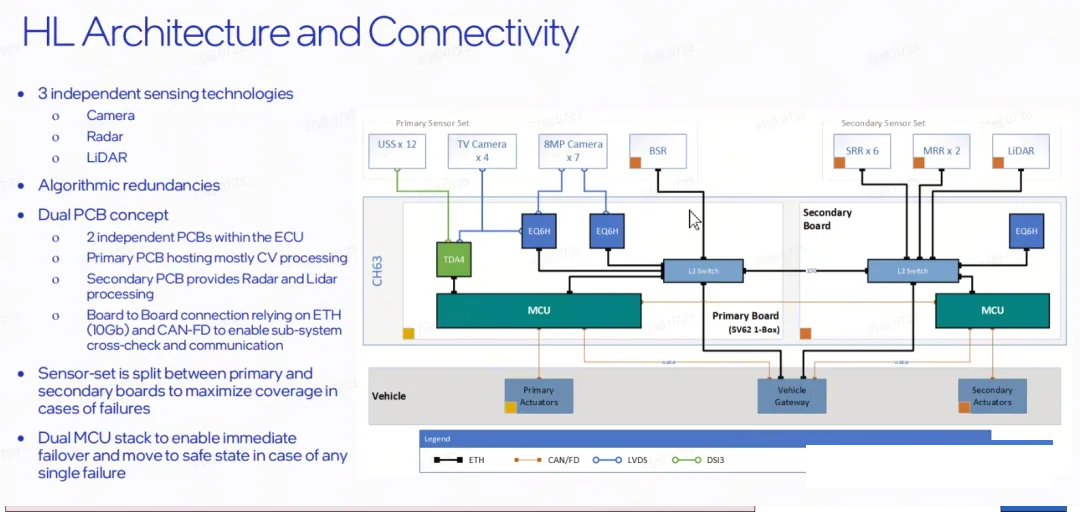
图片来源:Mobileye
3.3)奔驰
2021年,奔驰Drive Pilot系统通过了德国联邦机动车运输管理局(KBA)审批,成为全球首个获得联合国法规UN-R157认证的汽车企业。2023年,奔驰获得美国监管部门的批准,在加利福尼亚州和内华达州部署L3级自动驾驶系统。奔驰的Drive
Pilot系统支持最高车速为60公里/小时,实现TJP功能,该系统主要部署在奔驰S级轿车和EQS汽车上。
奔驰的Drive Pilot系统的域控制器采用的SoC方案是:Xavier/Xilinx,以及英特尔Denverton/双Orin-X。
传感器方案是:1个激光雷达(法雷奥、安装在前格栅),1个前向毫米波雷达,4个角雷达,1个前向双目摄像头,1个后摄像头,1个驾驶员监控摄像头,4个环视摄像头,12个超声波雷达。
此外,还有安装在车轮附近的湿度传感器,以及车外麦克风。

图片来源:奔驰
3.4)本田
2021年,Honda发布Elite L3产品,该产品仅用于高精度地图覆盖的快速路,车速低于50km/h,主要实现类似TJP的功能。本田自动驾驶系统具备激光雷达、毫米波雷达、摄像头、超声波雷达等多种类型的传感器,使用多传感器融合技术。同时在底盘硬件上增加冗余,配置运行双
ECU 的双电源和自动刹车、自动转向的独立并行系统。
本田方案采用的SoC是R-Car V3U(96K DMIPS,60TOPS,ASIL-D)。
传感器方案是:5个激光雷达,1个前向毫米波雷达,4个角雷达,1个前向双目摄像头,1个驾驶员监控摄像头,4个环视摄像头,12个超声波雷达。
本田L3系统架构如下:

图片来源:类星频道,本田
本田自动驾驶的逻辑概念:
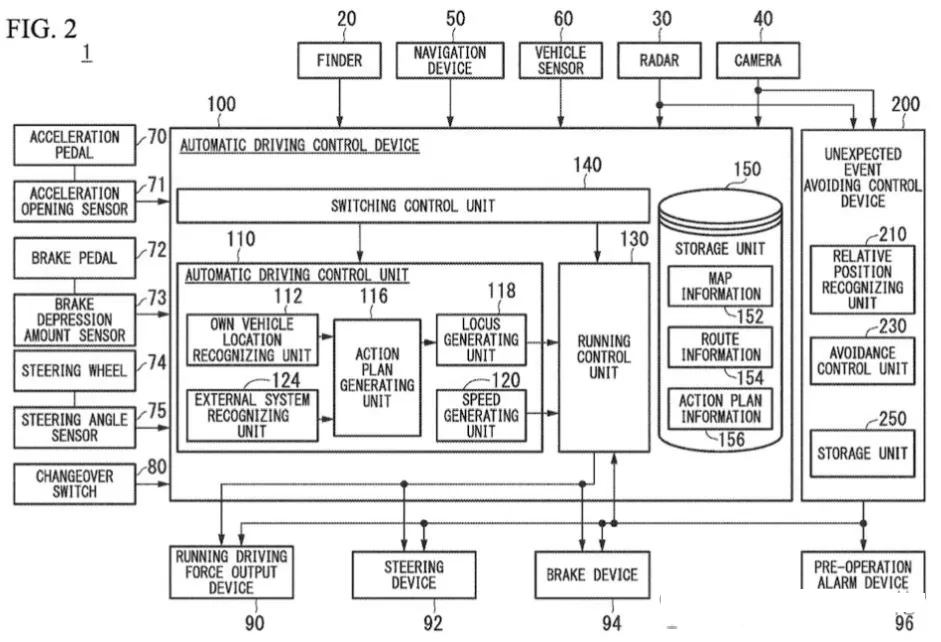
图片来源:本田专利
4)L4系统方案
目前L4主要应用低速泊车场景。
从系统方案角度,L4和L3的设计思路比较接近,主要区别在于L4需要提供更强的冗余系统,在即便是驾驶员不接管时,也可以安全的降级运行或者安全停车。
由于市场案例还不多,这部分内容待后续文章中再补充。
03
发展趋势
1)自动驾驶的应用趋势
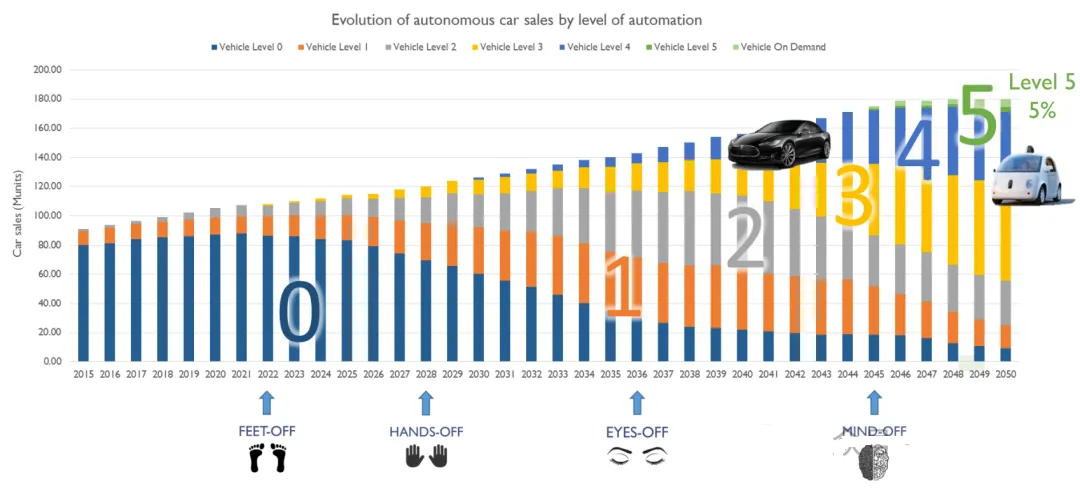
下图是来自于YOLO在2015年的一个分析报告,虽然时间已经较早了,但是当时做的推测放到在今天的实际发展来看,依然是比较准确的。
图片来源:YOLO
目前L0-L1已经比较普及,L2系统正在从高端汽车上快速的向中低端汽车渗透,L3系统应用还较少。
图片来源:YOLO
随着自动驾驶等级的提升,往往要求的更多的传感单元。
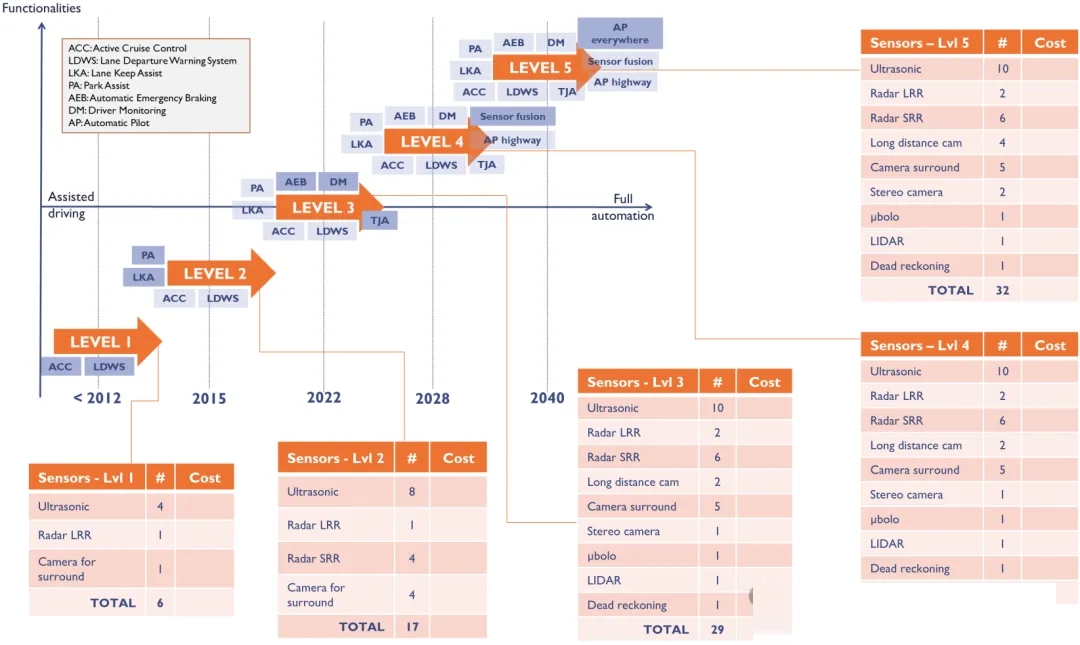
图片来源:YOLO
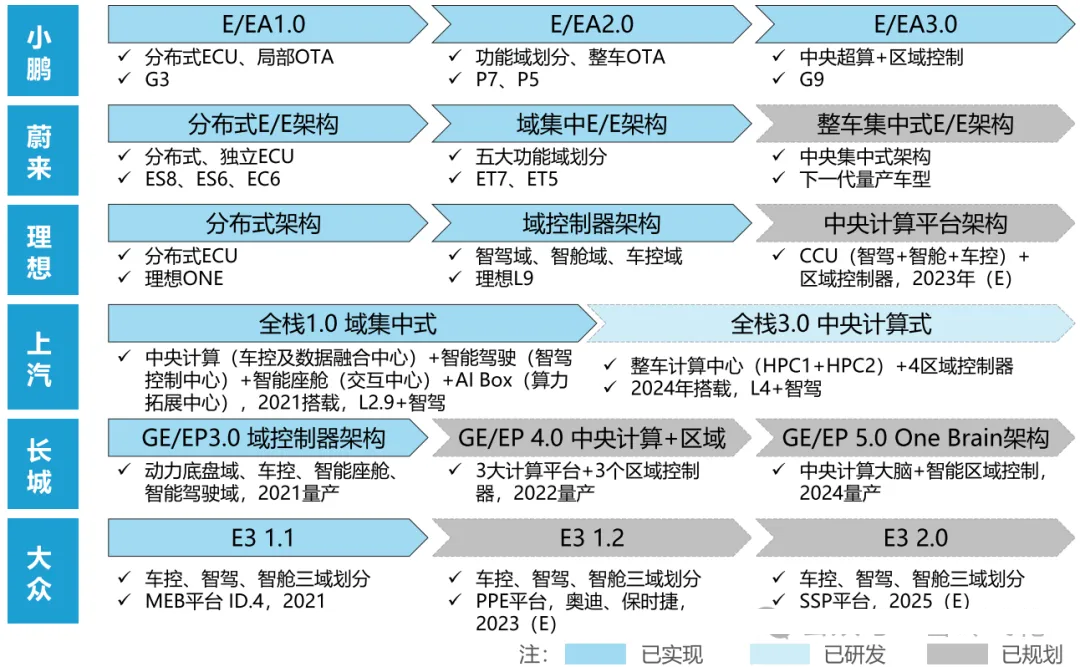
2)EE架构的演进
随着智能汽车的发展和自动驾驶技术的演进,整车EE架构也在逐渐从分立式向集中式演进。
下面BOSCH这张著名的EE架构演进图,在几乎所有讨论EE架构演进的PPT中,基本都会引用:
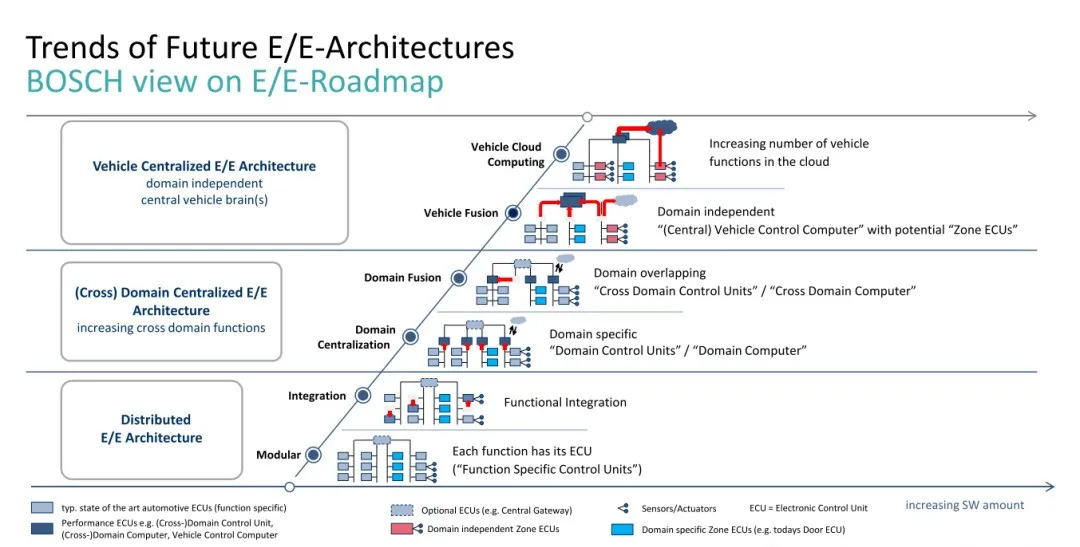
图片来源:BOSCH
翻译成中文,如下:
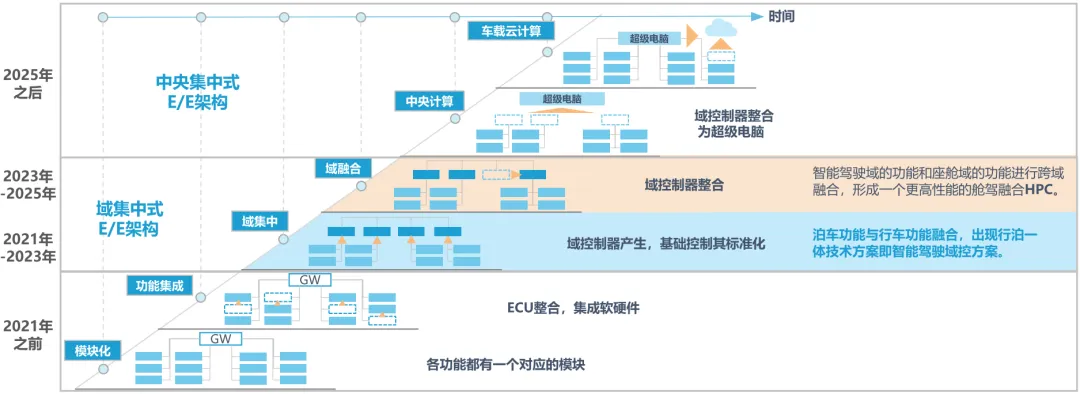
图片来源:亿欧智库
大陆也有类似判断:
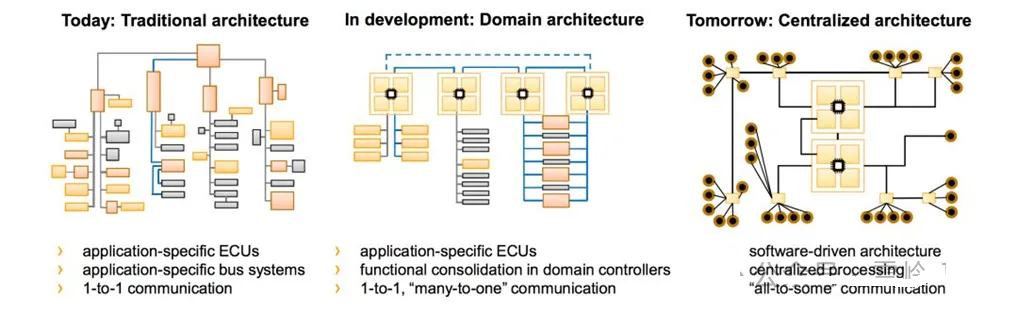
图片来源:Continental
其中核心观点是,汽车上的控制器会逐渐的整合,由之前的多个独立控制器,整合为几个主要的域控制器,由域控制器再融合为算力更大的中央计算控制器。
EE架构之所以有这个发展趋势,其主要原因由如下几个:
电子控制器越来越多,保持分立控制的话,布置越来越困难、整车线束越来越长,网络通信越来越复杂,成本难以控制;
芯片制程越来越高,使得大算力芯片在汽车上部署成为可能,整合若干个小控制器为1个大控制器(或者域控制器)可以有效降低控制器和线束成本;
OTA是智能网联汽车的一个重要特性,使用少量的几个集成化控制器,可以极大的方便软件升级,降低车辆售后成本;
集成化使得控制器之间的通信,变成了板间通信、片间通信、甚至片内通信,可以大大提升数据带宽以及抗干扰能力,方便各控制单元之间快速可靠的传输大量数据,进而提升整车功能的整体性能;
新势力、部分自主车企(长城、比亚迪、吉利等)已率先进入域集中架构阶段,合资、外资车企陆续跟进,当中部分领先企业已开始尝试探索跨域融合架构与中央计算架构。
图片来源:亿欧智库
3)由单域到跨域融合
L0和L1不需要独立的域控制器,从L2开始,车辆配置专用的自动驾驶域控制器。L3及以上还需要多个智能驾驶域控制器用于冗余备份。
根据汽车电子部件功能,通常将整车域划分为五大域:智能座舱域、车身控制域、动力总成域、底盘域以及智能驾驶域。
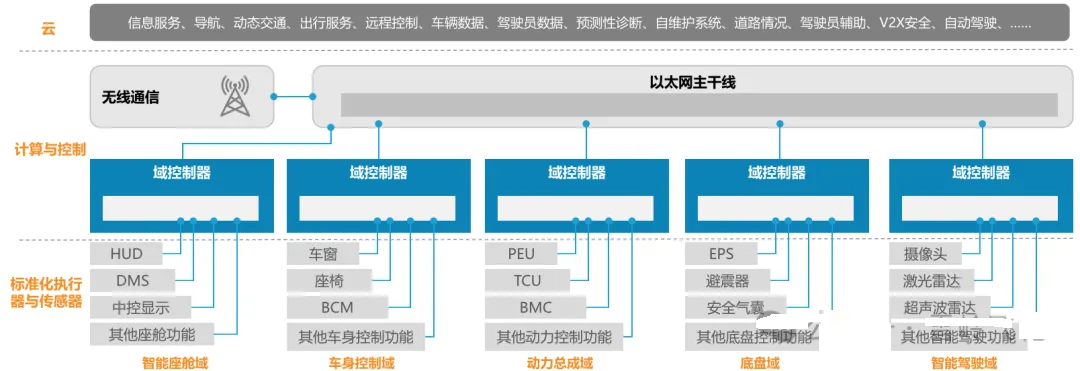
图片来源:亿欧智库
目前,五大功能域之间开始尝试进行跨域融合,由于座舱域和智驾域都有智能化的需求,因此当前主要以舱驾融合为主。
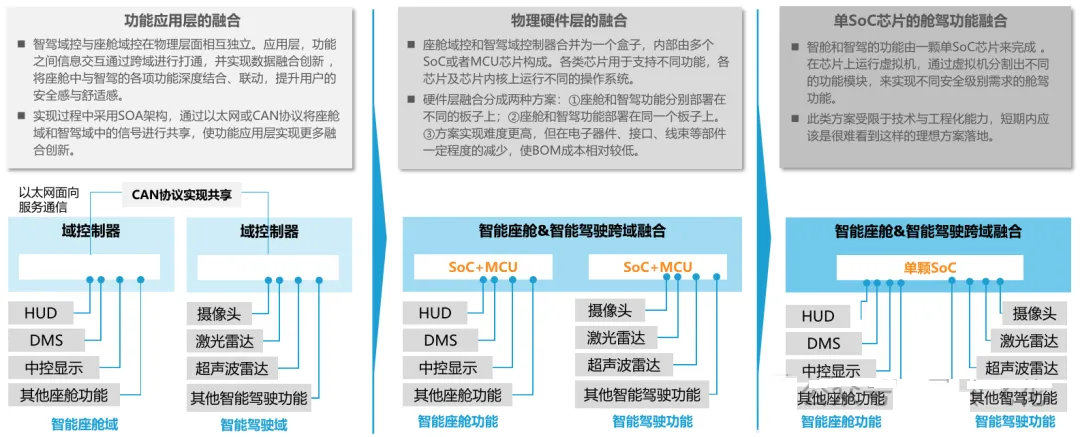
根据亿欧智库的分析,舱驾融合一般路径是:“功能应用层的融合”(Two Box)→“物理硬件的融合”(One
Box)→“单芯片的融合”(One Chip):
图片来源:亿欧智库
目前有多个厂家已经发布支持舱驾融合的大算力芯片,例如英伟达的算力达到2000TOPS的Thor,以及高通的Snapdragon
Ride Flex SoC。

图片来源:英伟达
图片来源:英伟达
不过舱驾融合还有许多挑战,例如:
域控制器硬件开发更为复杂;
智驾和智舱的功能安全等级、OTA升级策略差别较大,需要设计更为复杂的功能隔离和管理机制;
舱驾融合后耦合性增强,集成测试和回归测试工作量大幅提升;
智驾和智舱往往分属不同的开发部门,整合之后的职责分工将带来新的挑战等等。
舱驾融合方案目前大部分还在论证和开发中,量产车还不多。
4)感知架构的演进
随着域控制器的集成度越来越高,为了进一步降低成本和提升感知性能,许多感知单元的算力也逐渐往域控制器集成。
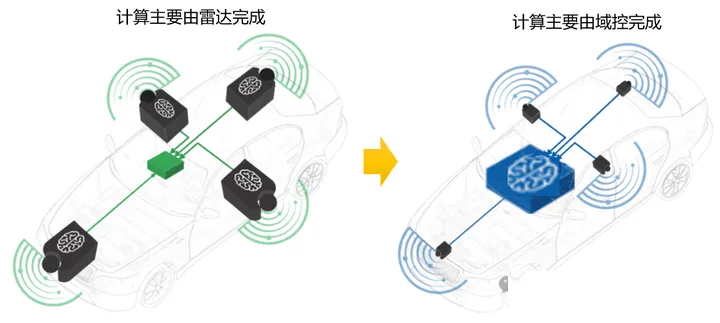
例如,4D成像雷达数据处理工作量的大幅增加,对算力需求增加。因此,将雷达算力在从雷达转移到域控制器上,雷达只做基础信号处理算法甚至只收集原始数据,而雷达信号及信息处理、AI算法在域控制器上运行,从而实现更好雷达感知效果。
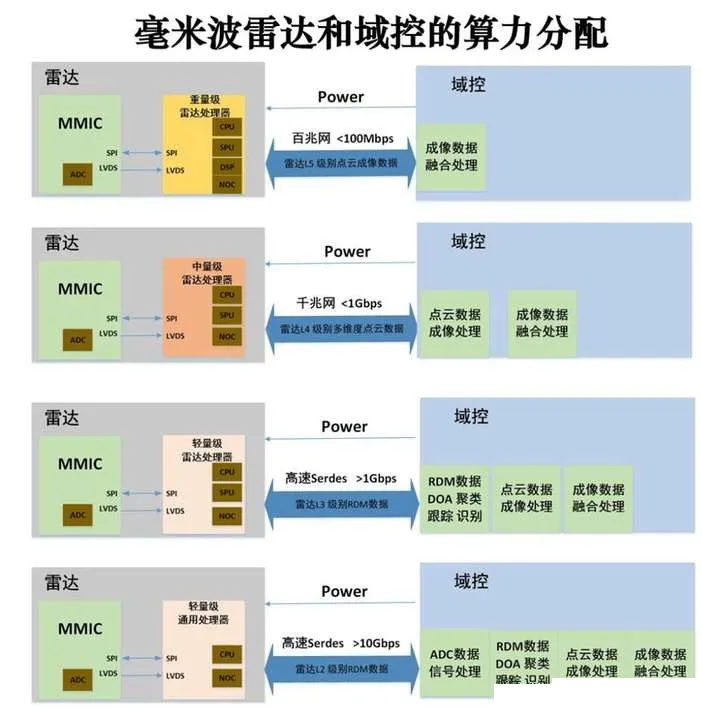
图片来源:川速微波
将雷达的MMIC和处理器彻底分离,雷达成为仅含有MMIC的“雷达头”。示意图:
激光雷达的线束数越来越多,点频越来越高,数据量也越来越大,信号处理算力也会逐渐往域控制器集成。
摄像头像素数会继续提升,12M甚至17M像素的摄像头,在未来应该会逐渐量产。
随着城市NOA的推进,以及端到端大模型的逐渐落地,高精地图由于制作成本和更新频率的问题,使用场景可能会越来越少。
04
结语
对于各级别自动驾驶的系统方案:
L0-L1系统:方案已经非常成熟,未来将主要用于低配车型;
L2系统:在传感器的配置、域控制器形态等方面方案众多,百花齐放,百家争鸣。在性能逐渐提升的同时,系统成本逐渐降低;
L3系统:还在早期的方案探索阶段。
L4系统:在泊车等封闭场景探索量产可行性。 |






 订阅
订阅