| 编辑推荐: |
本文全面介绍了自适应巡航系统(ACC)相关内容。希望对你的学习有帮助。
本文来自于微信公众号英创汇智,由火龙果软件Linda编辑,推荐。 |
|
ADAS (Advanced Driver Assistance System)作为一种高级驾驶辅助系统,其利用车载信息传感器获取道路目标信息并对车辆的行驶做出部分自动控制,以此减轻驾驶员的驾驶负担。此外,在主车即将发生碰撞或失稳危险而驾驶员未及时采取有效措施时,该系统可对主车进行自动安全控制,从而避免交通事故的发生或减小交通事故的伤害程度。
ADAS包括AEB、ACC、LKA、BSD等功能。目前英创汇智主要在研功能有AEB、ACC、LKA三种。
其中自适应巡航系统(Adaptive Cruise Control,ACC)是一种可以高效缓解驾驶疲劳,提高道路车辆行驶安全性的主动安全技术。作为新一代辅助驾驶系统,它可以减轻长期的驾驶负担,还能有效减少错误驾驶和疲劳驾驶引发的交通安全事故,并在现有交通基础设施上增大道路交通通行能力,减少燃油消耗和废气排放。
1 设计规范
目前现有ACC法规主要有两份:
《GBT 20608-2006 智能运输系统 自适应巡航控制系统性能要求与检测方法》
《ISO 15622-2018 Intelligent transport systems - Adaptive
cruise control systems -Performance requirements and
test procedures》
2 ACC系统组成及控制逻辑
自适应巡航系统(Adaptive Cruise Control,ACC)是根据主车与前方车辆间的相对距离、速度等信息,通过自动调节油门开度和制动压力对主车速度进行速度和距离控制,使得主车与前方车辆保持安全的车间距。
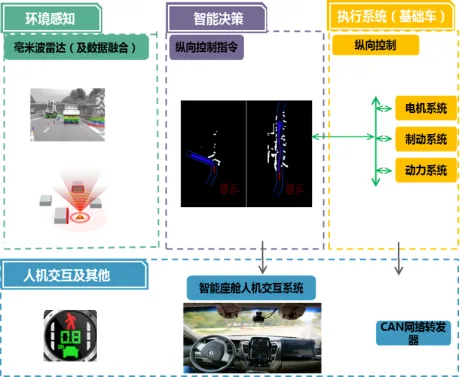
图1 ACC系统组成
如图1所示,ACC系统主要由环境感知、控制决策、底层执行和人机交互四部分组成。其中,环境感知由毫米波雷达和摄像头组成,通过数据融合,感知周边障碍物信息,如相对速度、纵向距离、横向距离、目标加速度以及置信率等;控制决策是根据感知信息,决策所需要的控制指令;底层执行部分包括驱动和制动系统,根据控制指令协同控制车辆的行驶;人机交互是根据不同驾驶员的驾驶需求调节所需的巡航车速或安全车距。
如下图图2所示为ACC系统的控制逻辑,由图可知,主车行驶首先根据环境感知部分判断前方是否有车辆,若没有车辆,系统进行传统的定速巡航控制;若前方有车辆,则跟随前车行驶,即自适应巡航控制。判断选择何种行驶模式后,根据整车状态、设定车速、设定车距等信息计算相应的期望加/减速度,继而选择响应的驱动/制动方式,使主车保持一定车速或主车前车保持一定车距行驶。
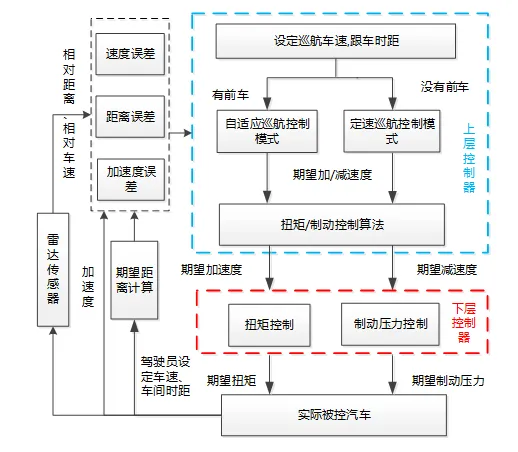
图2 ACC系统控制逻辑
ACC系统需保证驾驶员优先原则,当驾驶员需要超车、制动等主观操作时,该系统需及时被抑制或关闭并由驾驶员接管。另外,ACC系统设计应尽可能保证驾驶的舒适性与安全性,即控制期望加速度保持在-3m/s²
- 1 m/s²。当需要更大的减速度时,ACC控制单元会发出声光信号通知驾驶员主动采取制动操作,若驾驶员未采取相应操作时,ACC系统将采取强制制动。当与前车之间的距离增加到安全距离时,ACC控制单元控制车辆按照设定的车速行驶。
3 ACC系统功能描述
目前ACC同时包含定速巡航(CC)、停启系统(Stop&Go)等功能,并且当前绝大部分研究都将这些功能分开处理。这些功能的使用场景范围多种,例如:巡航功能的ACC系统多适用于高速公路,而Stop&Go功能的ACC系统多适用于城市堵车工况。目前开发的全速自适应巡航系统能够同时满足大多数的场景工况,使得驾驶员的劳动强度能够在更大程度上得到解放,很大程度上减轻驾驶员的负担和失误操作的几率,提高汽车驾驶的舒适性和安全性。
3.1 状态切换
ACC系统状态分为4种:ACC关闭状态,ACC等待状态、ACC故障状态和ACC工作状态。ACC系统状态及切换如图3所示:
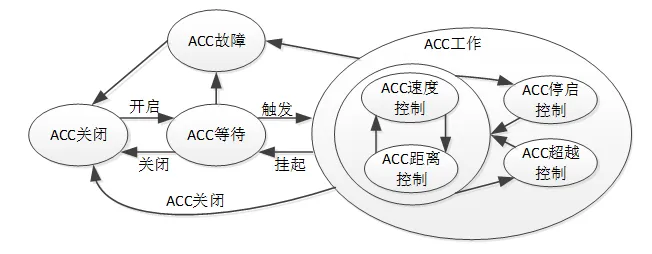
图3 ACC系统状态切换图
ACC关闭状态:直接的操作均不能触发ACC系统,驾驶员可通过车辆外部按键手动开启和关闭ACC;
ACC等待状态:ACC系统没有参与车辆的纵向控制,但可随时被驾驶员触发而进入工作状态;
ACC工作状态:ACC系统控制本车的速度或与前车的距离,且可以在驾驶员超车介入时,进入驾驶员超越模式,并且可以自动起停;
ACC故障状态:由于车辆执行机构本身、感知系统或ACC系统发生故障,进入ACC系统故障模式。
Ø ACC开启条件:驾驶员打开ACC开关按钮;雷达正常工作;ESP状态正常;安全带系好,且车门关闭;
Ø ACC触发(激活)条件:档位位于D档;驾驶员设定巡航车速,EPB不工作,驾驶员不踩制动踏板、离合器,ASR/EBS/ABS不工作;
Ø ACC挂起条件:驾驶员踩制动踏板;驾驶员踩加速踏板;雷达更换跟踪目标、驾驶员踩制动踏板、离合器,ASR/EBS/ABS工作;
Ø ACC关闭条件:驾驶员关闭ACC开关按钮;ESP状态不正常;ESP介入工作;AEB介入工作;雷达状态不正常;
Ø ACC故障条件:系统感知故障、EBS/ABS故障、发动机故障等。
3.2 定速巡航控制
图4所示为定速巡航控制逻辑,当前方无车辆时,ACC进入定速巡航控制。根据设定车速和当前车速计算得到所需的目标加速度,进而得到目标扭矩偏差。
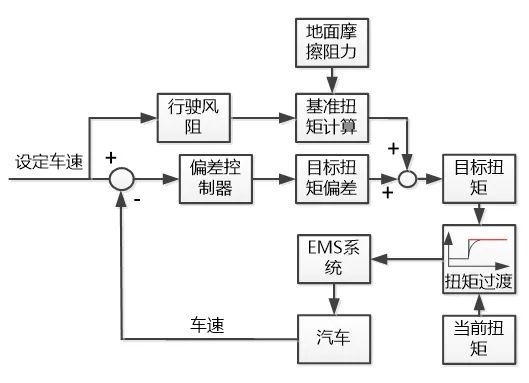
图4 定速巡航控制逻辑
而根据车速和地面摩擦阻力可计算得到基准扭矩。基准扭矩和扭矩偏差组成目标扭矩,这样实际构成了前馈+反馈控制,提高了控制的响应速度和鲁棒性。为了减小超调,当前扭矩会平滑过渡到目标扭矩。平滑后的目标扭矩通过CAN总线传送到EMS系统,实现车速的控制。
3.3 跟车行驶控制
当前方有车辆时,ACC进入前车跟随控制逻辑。前车跟随控制主要根据雷达采集到的相对速度和相对距离进行距离控制和速度控制,跟车状态见图5。
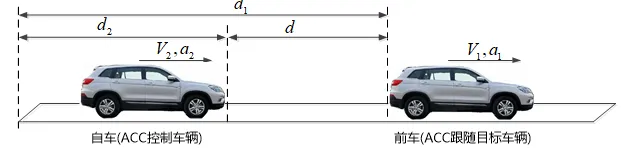
图5 ACC跟车示意图
当相对距离大于设定距离时,进行距离控制,通过控制器得到需要的加速度和扭矩偏差,结合基准扭矩,将目标扭矩平滑后传送至EMS系统。当相对距离小于设定距离时,进行速度控制,由相对距离和相对速度得到目标减速度。基于轮胎模型,得到所需的制动压力,平滑过渡后传送至ESP系统,控制逻辑见图6。
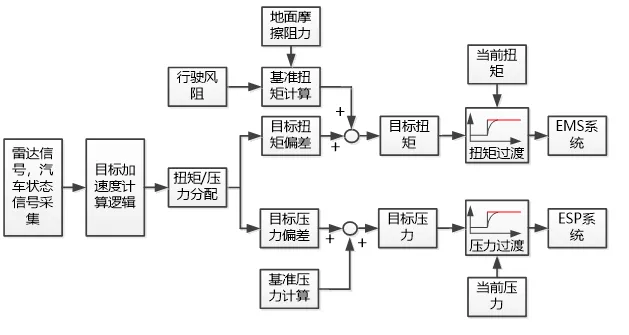
图6 跟车行为控制逻辑
3.4 停启功能控制
当车速低于30km/h时,进入ACC的Stop&Go控制逻辑,实现在交通拥挤路况下的车辆启停。此时ACC控制的最大减速度变为-6m/s²。
当监测到前方车辆静止时,根据雷达信号和预设的常量偏置距离计算出所需的制动压力,通过ESP系统实现平缓停车。当停车时间超过门限值时,触发EPB控制。当监测到前方车辆启动时,若此时处于EPB控制阶段,发送EPB释放信号,若只是短暂停车,对轮缸制动压力泄压。根据前车车速和距离,计算平缓起步所需的扭矩。同时停启功能在启动汽车时考虑到道路坡度的影响,合理分配发动机扭矩,并且在坡度较大时退出ACC功能,控制逻辑见图7。
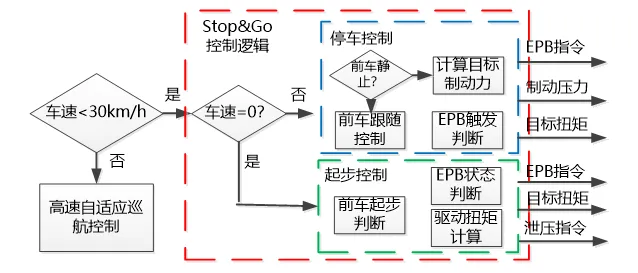
图7 停启功能控制逻辑
3.5 前碰撞预警控制
ACC系统集成了前碰撞预警系统,当出现即将发生碰撞的危险时,预警系统通过报警信号,提醒驾驶员进行制动操作,此时ACC进入预增压模式,便于驾驶员实现最大刹车制动。若驾驶员没有响应预警,进行人为制动,则ACC控制器进行允许的最大制动强度制动,并持续对驾驶员进行报警提醒,控制逻辑见图8。
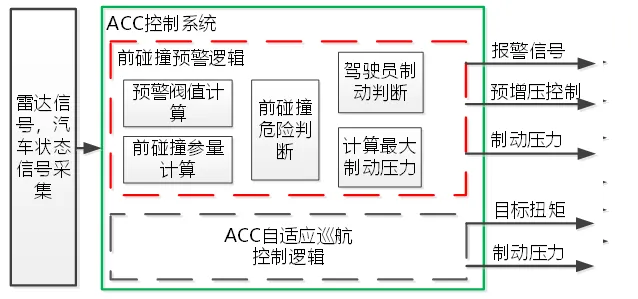
图8 前碰撞预警功能控制逻辑
|






 订阅
订阅