| 编辑推荐: |
本文主要介绍了ACC
自适应巡航系统相关内容。希望对你的学习有帮助。
本文来自于微信公众号汽车电子与软件,由火龙果软件Linda编辑,推荐。 |
|
引 言
自适应巡航控制系统(ACC:adaptive cruise control)是对传统定速巡航控制系统的升级,该系统既可以使车辆保持驾驶员设定的速度,也可以使本车与前车保持驾驶员设定的时间距离来衡量的。停走型自适应巡航系统(ACC
Stop & Go)可根据前车直至停止并自动跟随前车启动或者在驾驶员的指令下启动。需要注意:ACC不是一个安全系统、障碍物探测器或者碰撞警告系统,而是一个舒适性系统,驾驶员必须一直保持对车辆的控制并且对车辆负有全部责任。ACC的功能可以辅助驾驶员,但是不能代替驾驶员进行驾驶。即使ACC处在激活状态驾驶员也必须谨慎驾驶并且需要服从限速规则。(基本原则,注意事项)
依据国标GB/T20608-2006自适应巡航控制(ACC)系统的主要功能是基于特定的信息控制车速与前方车辆运动状况相适应,这些信息包括:
(1)与前车间的距离;
(2)本车(配备ACC)的运动状态;
(3)驾驶员的操作指令(见图ACC系统工作原理)。
基于上述信息,控制器(图1中称为“ACC控制策略”)发送控制指令给执行器以执行纵向控制,同时将状态信息提供给驾驶员。
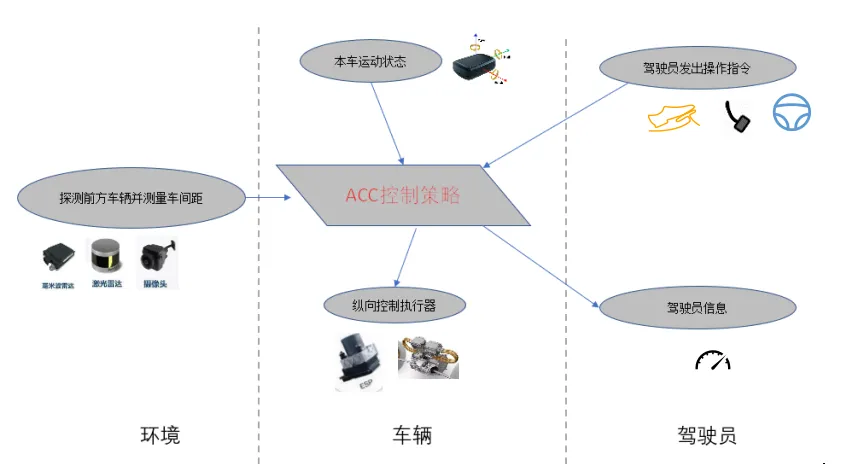
ACC系统工作原理
ACC的目的是通过对车辆纵向运动进行自动控制,以减轻驾驶员的劳动强度,保障行车安全,并通过方便的方式为驾驶员提供辅助支持。
ACC 系统状态
ACC系统的状态可分为 3 种:ACC关闭状态、ACC 等待状态和 ACC工作状态。ACC系统的状态及其转换见图ACC
系统的状态及其转换。
ACC 关闭状态 直接的操作动作均不能触发ACC系统。
ACC 等待状态 ACC系统没有参与车辆的纵向控制,但可随时被驾驶员触发而进人工作状态
ACC 工作状态 ACC系统控制本车的速度和(或)车间时距。
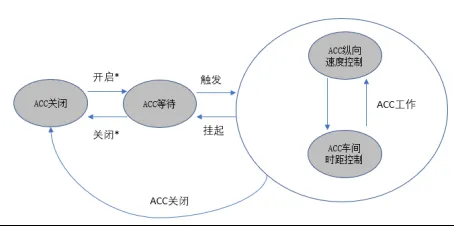
ACC 系统的状态及其转换
*自检以后的手动和(或)自动操作。手动切换实现 ACC 的关闭与非关闭状态的转换,系统检测到错误后将自动关闭
ACC。
一、 限制条件
1、 ACC功能限制
ACC的最小可设定的期望速度是30 km/h。
ACC的最大可设定的期望速度是150km/h。
ACC只能实现有限的制动力,不能够实现紧急制动。
考虑到安全因素,当ESP被关闭的情况下ACC不能被激活
制动器过热。
在ACC工作时,如果驾驶员踩踏油门踏板,车辆将被驾驶员接管。ACC系统的所有功能将被挂起。
2、 ACC运行环境限制
驾驶员须依据前方车流量,当前天气状况,如雨雪等,来调整跟车距离,对 ACC系统进行合理设置。驾驶员需要在任何时候都保证在其视野范围内可使车辆减速到停止状态。ACC适合在高速公路和路况良好的道路上使用,不适合在复杂的城市路况、隧道或者山路上使用。安全起见,在能见度差的情况下,或沿坡道及多弯路段,或在湿滑路面(例如,冰雪、潮湿或积水路段)上行驶时切勿使用ACC。
当进入和驶出弯道时,目标的选择有可能延迟或受到干扰。在这些情况下ACC车辆将可能不按预期制动或制动过晚。此时,驾驶员必须取代ACC主动踩踏油门踏板来控制车辆;或踏制动踏板,或按压多功能方向盘上的ACC按钮来取消ACC系统。
在某些情况下(前车的相对速度过大,过快换道,或安全距离过小等)系统没有足够的时间来减小相对速度或者使本车与前车保持合适的距离。在这种情况下驾驶员必须适当地作出反应,如主动施加制动降低车速。当出现紧急情况,仪表提示
“接管请求Take over request” 时,驾驶员需主动控制车辆。
在某些环境中探测有可能受到影响或者发生延迟,如目标的雷达反射截面积过小(可能是自行车、四轮马车或者行人)时,系统将有无法确认与前车距离的风险,这会导致对该类车辆反应延迟或无法反应的情况。在这类情况下驾驶员需要进行车速控制。
装有特殊装载物或特殊设备的车辆;ACC无法探测到其它车辆上装载的突出其车身侧面、后端或车顶的物品或安装的附件。如前方车辆装有上述特殊装载物或特殊设备超越此类车辆时务必关闭ACC。驾驶员应视情况主动施加制动。
暴雨、水雾、冰雪或污泥均可能恶化雷达传感器的功能,导致ACC暂时关闭,发生这种情况时组合仪表显示屏将显示相应信息,应按要求清洁传感器。一旦雷达传感器恢复正常状态,则ACC可重新被激活。
强烈反射的雷达信号(例如,在多层停车场里,隧道等)可能恶化雷达传感器的功能。
3、对前方车辆选择的限制
前方相关车辆的选择是通过车身周边传感器数据与自身传感器数据结合来设定的。因此前方目标选择的可靠性须依靠车身周边传感器的质量及周边环境条件来保证。由于这些原因,ACC有可能会出现错误识别及反应。当前方目标车辆的选择出现问题时,ACC有可能发生以下两种反应:
如果正前方相关目标车辆没有被系统正确的选择到,ACC将会使车辆加速到驾驶员设定的期望车速。
如果前方不相关的车辆,例如相邻车道上的车,被错误的选择作为正前方的目标车辆,ACC将会使车辆减速。
在上述两种情况下驾驶员都要主动接管对车辆的控制。
4、对某些目标没有反应
ACC系统不能对静止目标作出反应,驾驶员需要接管车辆操纵以防受到静止目标的影响,这在逼近堵车车流的尾部或者在交通信号灯前等候的车辆时,是极有可能出现的。如ACC探测到一辆正在转弯或变换车道的车辆,该车辆后还停有另一辆车,则系统不可能对该静止车辆作出反应,驾驶员应视情况主动施加制动。
ACC不能对迎面而来及横向穿过的车辆做出反应。
ACC系统一般来说只针对在道路上行驶的机动车起作用,而对行人、动物等没有反应。
二、 按键布置&基本操作
人机界面信息主要分成两大类:
人机界面输出:用于告知驾驶者系统当前的状态。仪表用来显示视觉信息,而音响用于显示声音信息(例如报警声)。
人机界面输入:用于驾驶者向ACC系统输出命令,以达到控制ACC系统的目的。
定义:打开/关闭开关通常也被成为主开关(main switch)
ACC打开:ACC打开表示ACC系统准备就绪、但此时ACC系统尚未介入车辆控制。只有在ACC打开且ACC激活后(见下页),ACC才会控制车辆速度。ACC打开是ACC激活的前提。
ACC关闭:ACC系统处于完全关闭的状态,在此状态下无法激活ACC。
建议:
当驾驶员打开ACC时,短暂显示文字提示ACC ON/ ACC打开
当驾驶员关闭ACC时,短暂显示文字提示ACC OFF/ ACC关闭
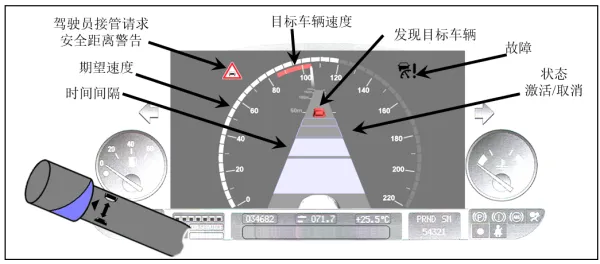
1、人机界面输出
ACC Active/CANCEL 激活/取消(必需)
ACC激活:当ACC系统处于激活状态、并且车辆正在由ACC系统控制以达到驾驶者设定的速度。换言之,车辆能够自动加速或减速。
ACC取消:当ACC系统处于取消状态或未被激活。除非驾驶者重新激活ACC系统,否则系统不会控制车辆。
让驾驶者时刻知晓系统的当前状态是很重要的,驾驶者必须要能够分辨出车辆是否能够自动作出反应。以上两种状态都必须清晰而且不同。
基于此,建议:
当ACC处于取消状态时,尽可能的隐藏ACC信息
当ACC处于激活状态时,相关信息使用彩色显示或高亮显示
系统激活显示ISO标准ACC符号,系统取消/关闭时不显示该符号
当取消ACC时,最好用文字提示“ACC Cancel/ACC取消”
Object valid发现目标车辆(必需)
如果探测到前方车辆,则仪表上会显示“发现目标车辆”,此后车辆才可能自动地作出反应。
一般是在仪表上显示一辆车的符号,提示发现目标车辆:

Take over request请求驾驶者接管(必需)
当系统自动制动的减速度不足以避免碰撞时,系统会请求驾驶者接管,以提醒驾驶者采取制动行为;
以短促而清晰的声音来警告,在仪表上显示警告图形或者将目标车辆的图形变成红色(红色三角图标表示请求驾驶者接管)

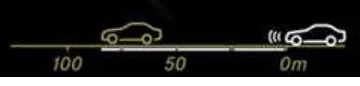
目标车辆位置(可选)
指的是前方目标车辆和自身之间的距离:在仪表上显示一个动态的汽车图形并且显示其距离
目标车辆速度(可选)
ACC车探测到的前方目标车辆的行驶速度:大部分ACC系统并不显示目标车辆速度

安全距离警告(可选)
当距离前方车辆距离过近而ACC处于关闭或驾驶员超越状态时,将会显示的警告;一般是显示和驾驶者接管请求相同的图形,但不用声音提示(可和“请求驾驶者接管”共用同一个显示)
2、人机界面输入
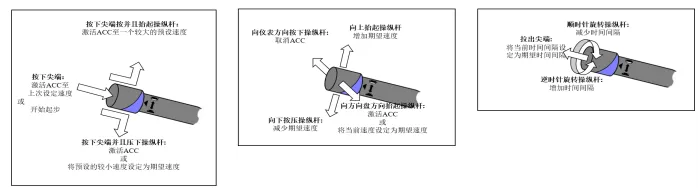
大多数主机厂选择ACC设定操作杆作为输入设备。建议在左侧、较高位置安装设定杆,以避免被驾驶者膝盖误操作。

一般的操纵杆仅仅提供旋钮和内置LED灯,高档的操纵杆其旋钮除旋转外还能够进行推拉操作。
操纵杆应能够沿着仪表的方向进行压下、抬起的操作,另外在朝向方向盘的方向上,也应能进行压下和抬起的操作。
高端操纵杆建议
高端界面
高端界面给驾驶者带来更全面的ACC体验,信息可以显示并且更好地分布。
时间间隔信息以两车之间实际的跟随距离显示,同时以分布式数值显示期望距离,以此来使驾驶者更容易判断是否需要增加或减少时间间隔。
系统关闭时,所有ACC信息消失,但是驾驶者仍能够调整时间间隔和期望速度。如果驾驶者此时调整了时间间隔或期望速度,那么相关信息仅显示2秒。被动模式下,所有信息以灰度/暗淡的形式显示,以使驾驶者注意到处于被动状态。
故障模式下,显示ISO符号并且隐藏其他ACC信息。
三、 停走型ACC
减速停车
如前方车辆制动停车,则ACC也随之减速停车,并将轿车保持在静止状态。
停车阶段
如ACC已将轿车减速至停车后,则踩下制动踏板时ACC不会自动退出。
停车期间如出现下列任一情况,电子驻车制动器将自动激活,ACC自动退出:
Ø 解开安全带
Ø 打开驾驶员侧车门
停车后起步
停车阶段后只要前车在3秒内再次开始移动,ACC随之自动使轿车起步行驶。如果前车停车时间超过3秒,则需通过
“RES” 按键或油门踏板重新激活。
1、驾驶员主动提速
当车辆在ACC巡航过程中驾驶员通过主动踩踏油门踏板会使车辆进入驾驶员主动接管提速状态。当驾驶员松开油门踏板之后,ACC会恢复巡航所设定车速继续巡航。
2、驾驶员接管请求
当ACC制动无法保持与前车安全距离时(如前车和自车相对速度过大等情况),ACC系统会发出驾驶员接管请求,当驾驶员收到此请求时应主动接管车辆,否则可能会有安全隐患。
|






 订阅
订阅