| 编辑推荐: |
|
本文主要介绍了主流整车EEA方案梳理汇总相关内容。
希望对你的学习有帮助。
本文来自于微信公众号汽车电子与软件,由火龙果软件Linda编辑,推荐。 |
|
最近更新了问界、小米、红旗几家主机厂的电气架构,汇总在一起给大家查阅。
01.小鹏
小鹏最新的电子电气架构名叫X-EEA3.0,那年的技术宣传图如图1所示,中央超算(C-DCU)加区域控制的架构,其中中央超算负责车控、智驾、座舱三大功能,区域控制器分为左右两个,将更多控制件分区,并且根据就近配置原则,分区接管相应功能,大幅缩减线束。

▲图1 小鹏X-EEA3.0架构
一年后的今天,X-EEA3.0的落地情况如何呢?从最近很火的小鹏G6来看,其网络拓扑如下图所示。
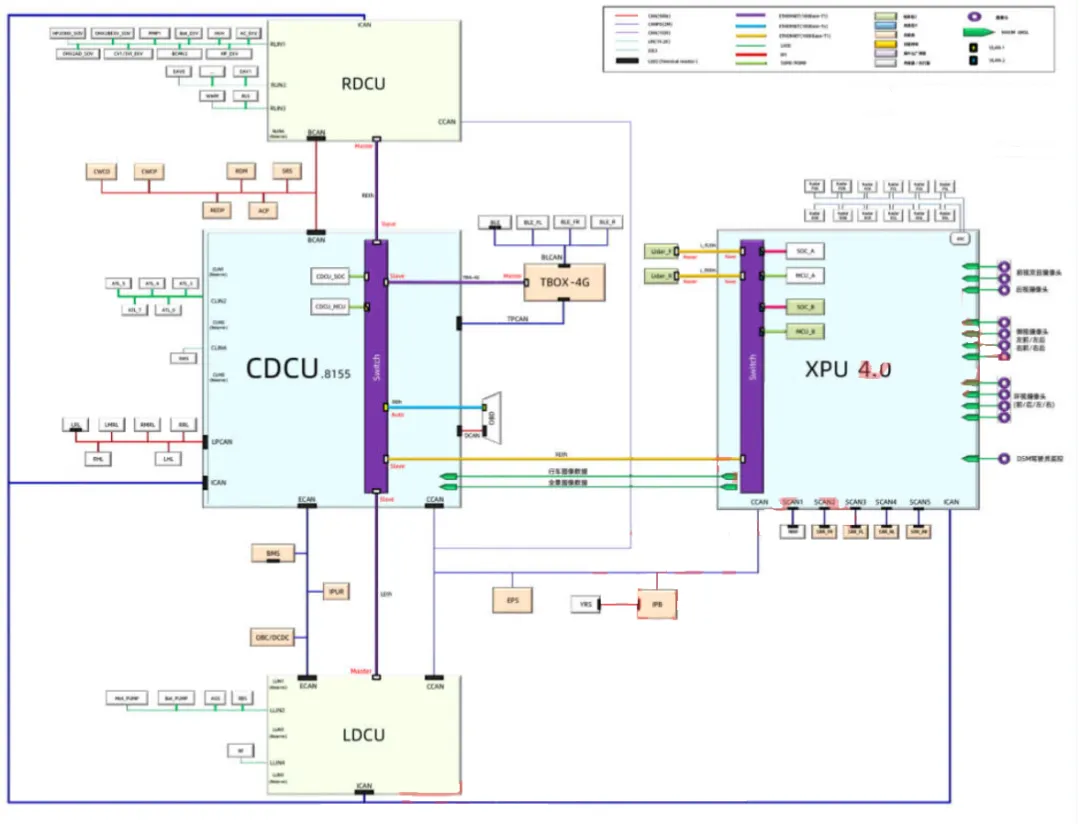
▲图2 小鹏G6的网络拓扑
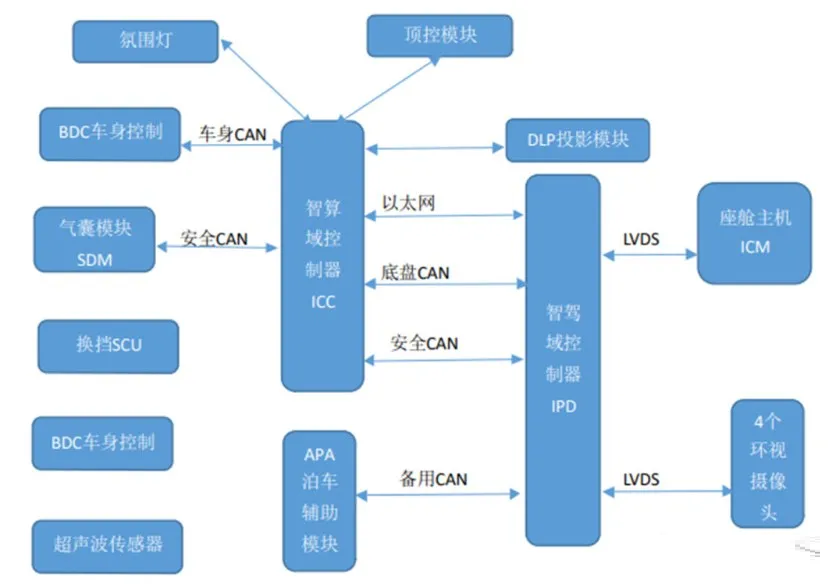
其中CDCU为图1中的中央超算,但是跟之前宣传的不太一样的是,CDCU宣传是的负责车控、智驾、座舱三大功能,而实际则是仪表显示、中控和副驾信息娱乐功能,以及跨域融合包括中央网关、车外声音控制、外部灯语控制、氛围灯控制和泊车辅助灯功能,其采用的主控为高通的8155。智驾还是单独的XPU负责。
▲图3 中央超算与其他模块的连接
CDCU与XPU以及TBOX之间的通信为1000Base-T1,与LDCU和RDCU以及OBD诊断口之间的为100M以太网。LDCU和RDCU的主控为瑞萨MCU,猜测为RXv3。
02.蔚来
2022年,蔚来展示了其基于区域控制器的电子电气架构,如下图所示,其中区域控制器负责分布式边缘计算框架、车控仲裁中心、面向服务通信的信息通信网络、区域集中式数据中心、整车配电枢纽。获取智能传感器的数据和控制智能执行器的行为。
▲图4 蔚来的下一代电子电气架构
从2023款ES8来看,中央域控基本是成型了,其主控包括4颗Orin和高通的SA8155,也就是前年在官网上宣传的adam超算平台。

▲图5 蔚来ES8的电子电器架构(来源佐思汽研)
区域控制暂时还没有看见,主要分了几个重要的控制器,包括车身控制器、车辆控制器、柔性底盘控制器,如下是车身控制器、车身网关控制器的接口图。
▲图6 蔚来ES8的车身控制器接口图
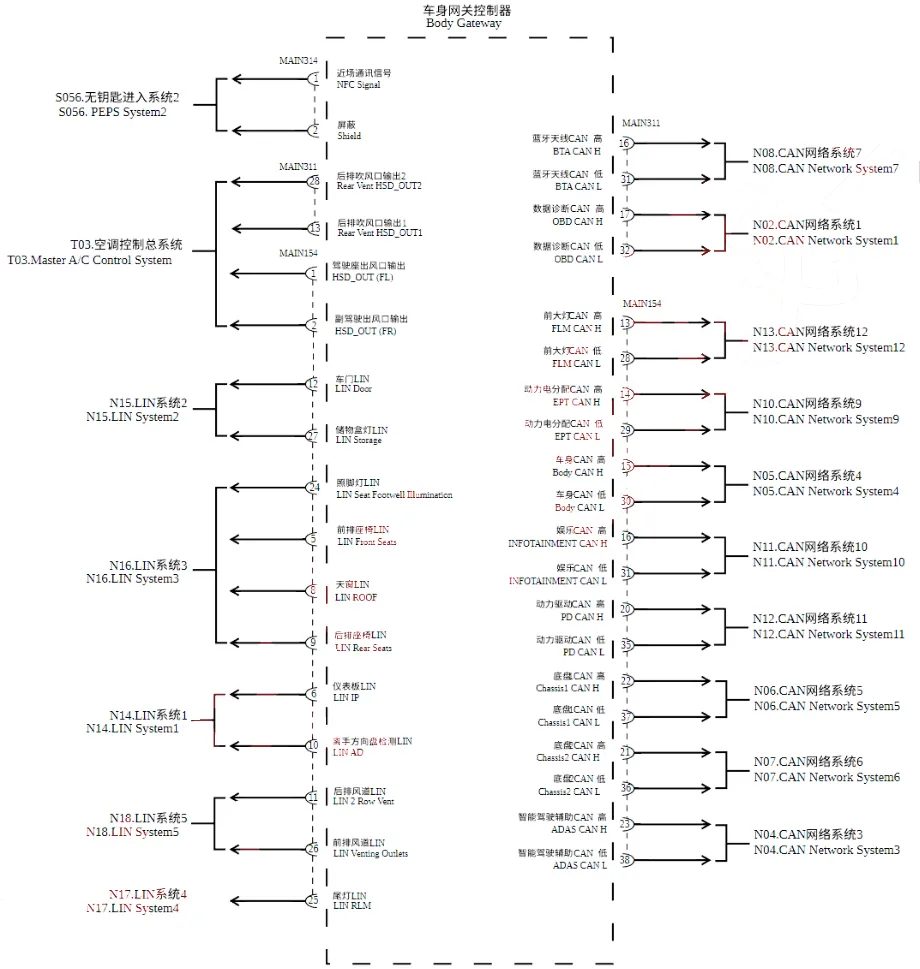
▲图7 蔚来ES8的车身网关控制器接口图
03.比亚迪
比亚迪E3.0是其最新的域控制器架构,在之前的技术展示中,其包括智能动力域、智能车控域、智能座舱域和智能驾驶域四大域控,如下图所示。
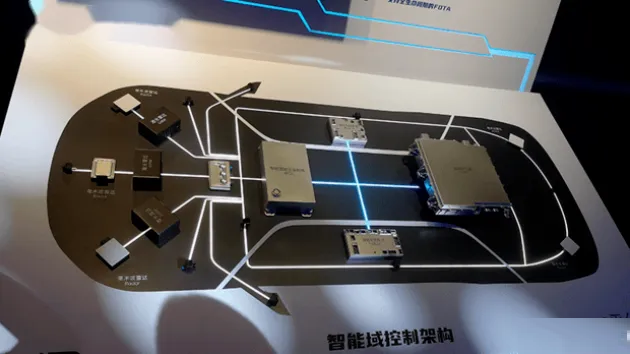
▲图8 比亚迪的智能域控架构
从2023款腾势DM9来看,当前的电子架构还是左、右、中车身控制器串起来的网络,如下图所示,离图8中规划的还有一段距离。
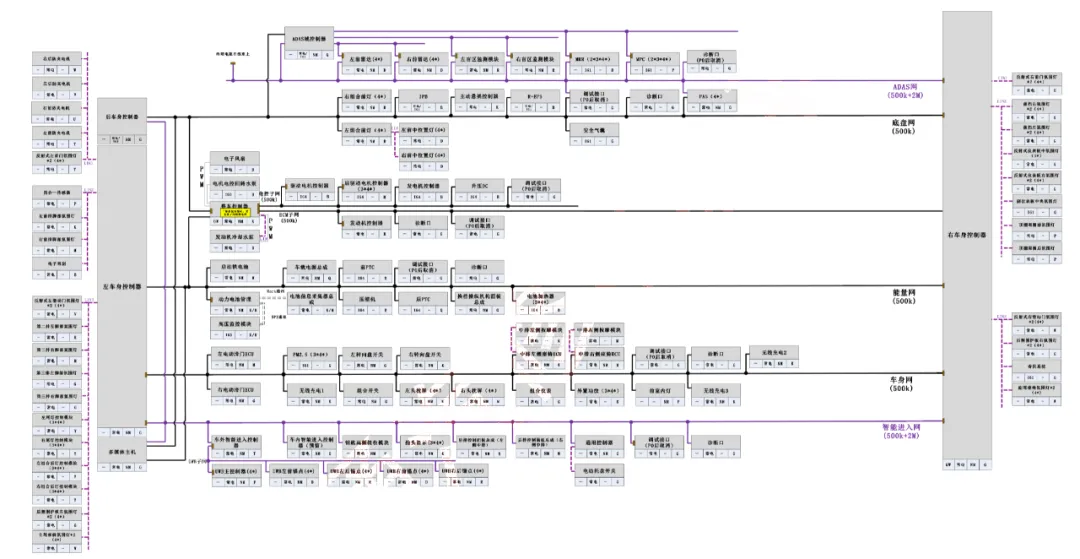
▲图9 腾势D9 电子架构图
04.上汽智己
2021年零束启动全栈3.0架构的研发,进行进一步的集中化,其两个高性能计算单元,来实现智能驾驶、智能座舱、智能计算、智能驾驶备份功能,再加
4个区域控制器, 实现各自不同区域的相关功能。
而两年后,进展咋样了呢?从智己LS6的电子架构可以看出一二。
LS6共有智联、智算、智驾、座舱四个域控制器。下图为智算域控,从接口来看,其功能类似于算力中心,智联域控类似于传统的T-box,智驾和座舱好理解,就是智能驾驶和智能座舱控制器。
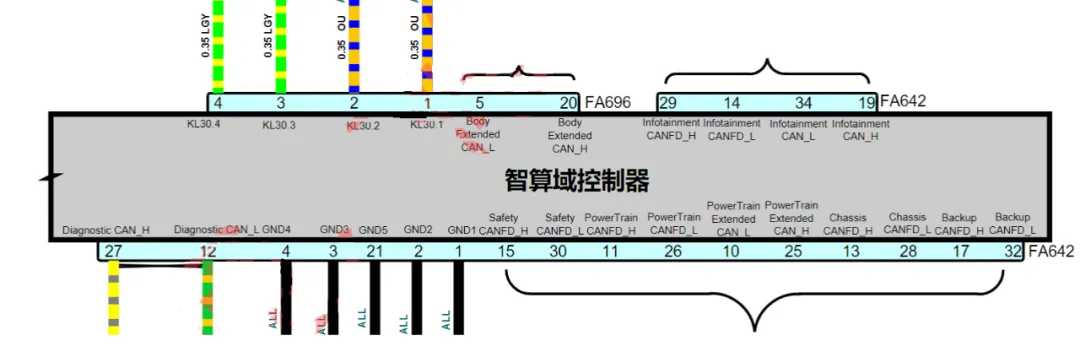
▲图10 LS6 智算域控制器接口图
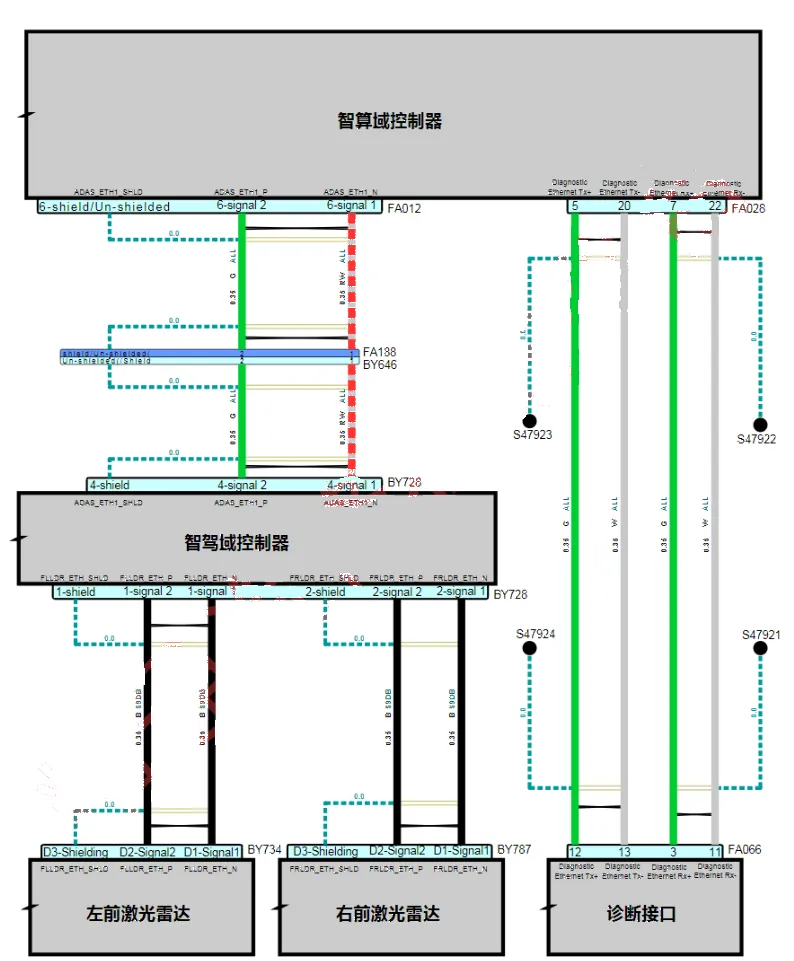
▲图11 LS6 智算与智驾域控制器连接部分图
▲图12 LS6 智算和智驾连接简图(来源:佐思汽研)
智驾和智算颇有点中央集中计算的意图,不过受限于芯片算力,还需要迭代更新。
05.阿维塔
电子架构是由华为提供,早在2021年上海车展,华为展出了分布式以太网络网关+域控制器(智能座舱CDC、整车控制VDC、智能驾驶MDC)的计算通信架构,如下图所示。

▲图13 华为2021提出的域控架构
那实际落地是怎样呢?下图是阿维塔11的电子架构简图,从图中可以看到座舱域控CDC、智能驾驶MDC以及整车控制器VCU,与图1中基本是一致的,

▲图14 阿维塔11的电子架构
其中网关与PTCANFD、PTSCANFD、CHDAND、TCANFD、RCANFD、ICANFD、BCAN相连,另外还具备100base_T1、100base_Tx、1000base_T1,其中网关与MDC、T-Box、CDC为千兆网,网关与车身域控、VCU、OBD口为百兆网。
智能座舱域
阿维塔的座舱无疑采用的是鸿蒙系统,芯片采用的是麒麟990A系列,基于7nm制程打造,CPU采用了4+4的8核心设计,主频最高为2.86GHz,AI算力为3.5TOPS。并搭载8GB运行内存和128GB储存内存。下图是座舱域控及其附件的示意框图。
▲图15 座舱及其连接附件图
智能驾驶域
阿维塔11的另一个亮点就是其遥遥领先的智能辅助驾驶了,首先从硬件上来看,可谓配置豪华,MDC810+3颗激光雷达+6颗毫米波+13个摄像头+12个超声波探头,总体的框图如下图所示。

▲图16 智能驾驶硬件配置
▲图17 智能驾驶硬件拓扑图
这里的核心就是MDC平台,关于阿维塔,官方没有给出具体是MDC610还是MDC810,不过对我们梳理影响不大,因为从华为智能驾驶平台介绍来看,
MDC平台统一一套软件架构,支持应用的快速开发和系列化共享,全系列统一尺寸,支持平滑升级替换。也就是说应该就是主控芯片不一样,外围的硬件和接口大差不差。
下面以MDC 610为例,其主控芯片组合采用一颗Ascend 610 + 一颗英飞凌TC397,其硬件架构如图2所示。

▲图18 MDC 610硬件架构
其各项指标如下所示:
1. AI算力为200 Tops(int8),ARM CORE的整型算力为220K DMIPs;
2. 液冷版功耗约为120W;
3. 传感器接口方面,14个LVDS摄像头接口,8路以太网接口,12路CAN/CANFD接口,6路车载以太网接口,1路PPS接口,各个接口定义如下图所示;
4. 防水等级为 IP67;
5. EMC等级为Class 3。

▲图19 对外接口含义
在加速能力方面,首先是支持丰富的AI算子,包括支持业界主流的AI框架,如Caffe、Tensorflow、Pytorch、ONNX,支持400个以上的主流算子的算子库;第二具备可配置硬件加速器,如图4所示;第三具有Vector
Core,提供矢量加速和CPU的scalar运算单元紧耦合,加速控制和数据并行运算混合的程序段,有利于频繁递归的CV算法。
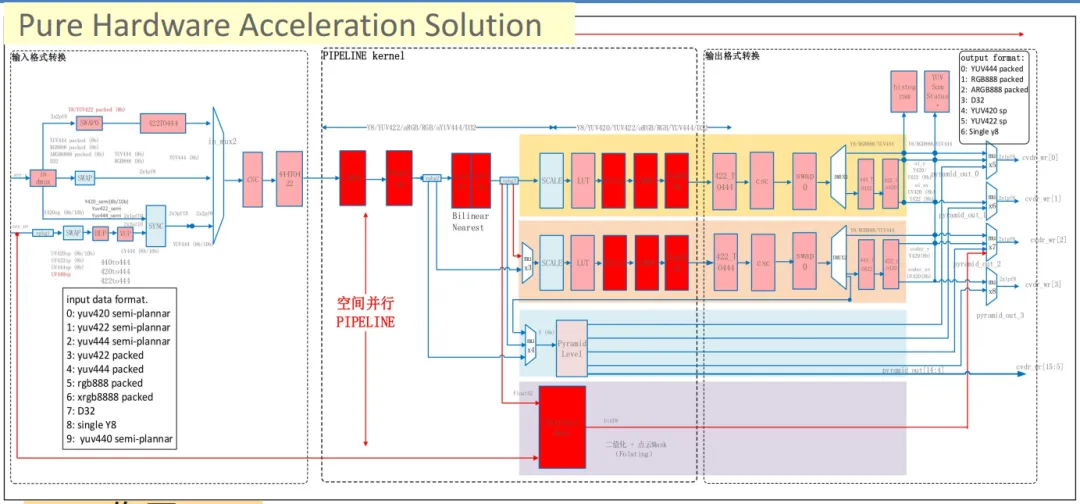
▲图20 硬件加速解决方案
MDC 平台软件架构如下图所示,其核心为华为自主研发的AP+CP+OS。
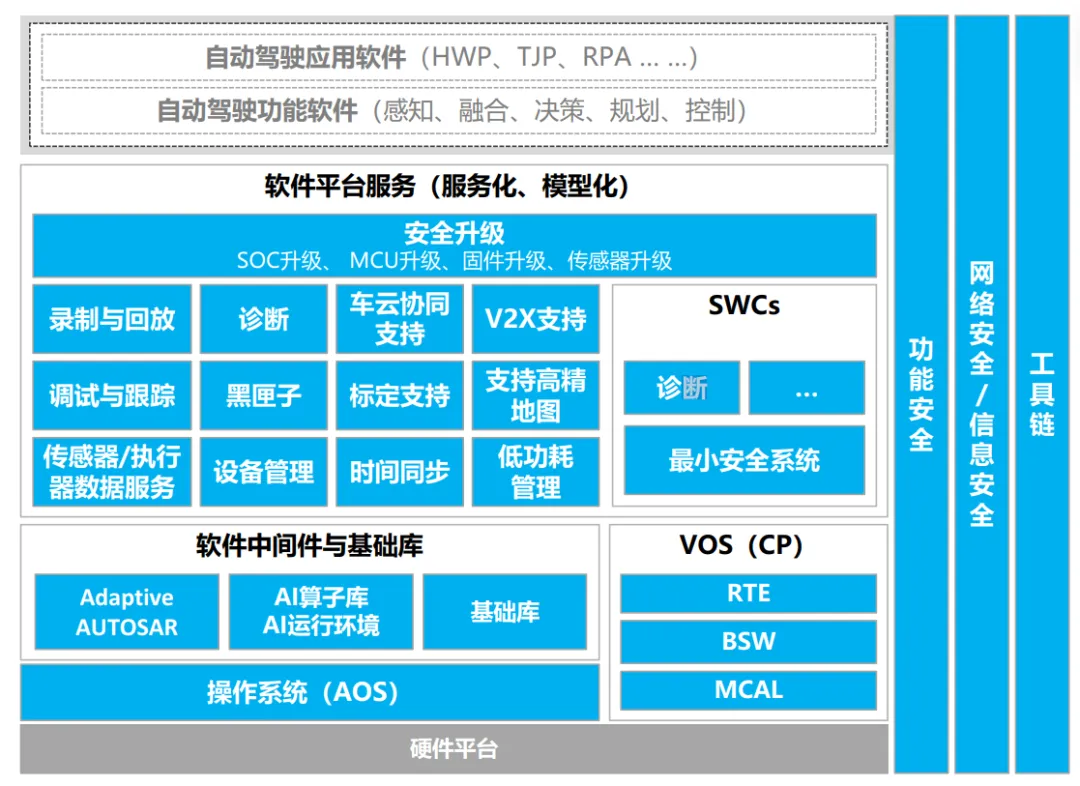
▲图21 MDC软件架构
华为自主研发Adaptive Autosar符合符合R19-11规范(及以上),具备通信管理、执行管理、状态管理、升级管理、健康管理、持久化、时间同步、访问管理、加密能力、诊断服务、网络管理,如下图所示,并且有符合Adaptive
AUTOSAR 规范的配置工具。
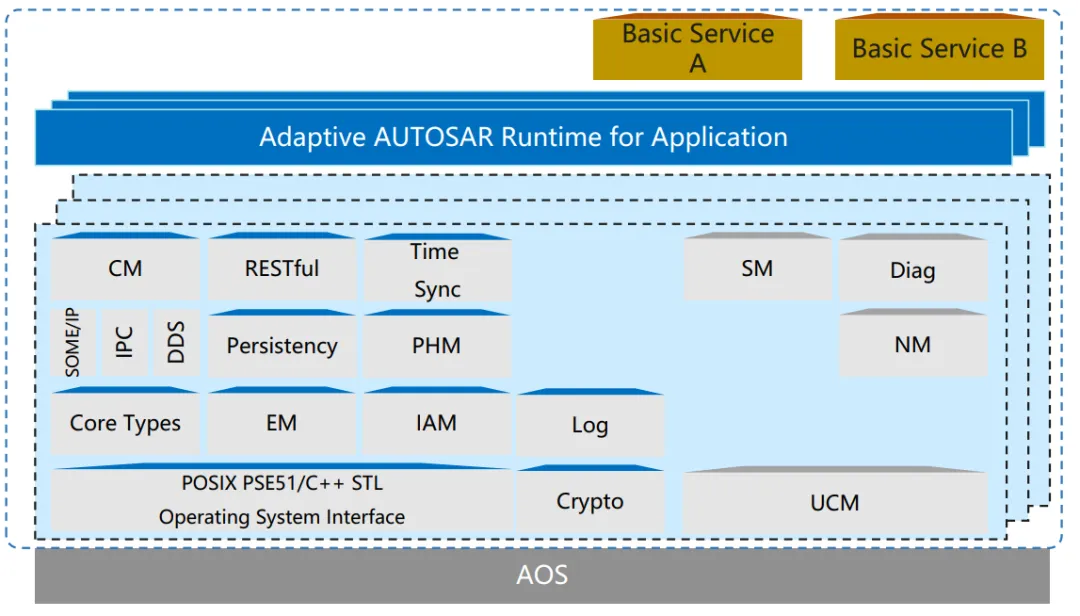
▲图22 MDC Adaptive Autosar特性
AOS为华为自研的实时操作系统,兼容Linux接口,具有确定性调度,低延迟,功能安全和Security特性,并且兼容Linux驱动框架和三方库。
在开放方面,无缝兼容AUTOSAR,在安全方面,支持安全隔离,Safety-Critical与Non-Critical应用安全隔离,软硬件Co-Design,去中心化架构,屏蔽单点软硬件故障,在确定性延迟方面是开源Linux的十分之一,内核延时小于10us,支持CC
EAL4++。

▲图23 AOS软件框架
最后在CP方面,有基于Classic AUTOSAR标准的VOS,满足AUTOSAR CP4.4规范,提供完整的CAN/ETH协议栈、诊断、NM、标定、存储等功能和服务,提供高功能安全的运行环境,支持客户开发/部署ASIL-D级别的业务
。并且如主流的AUTOSAR工具一样,图形化建模&开发工具,支持客户进行SWC的开发、BSW的配置等。
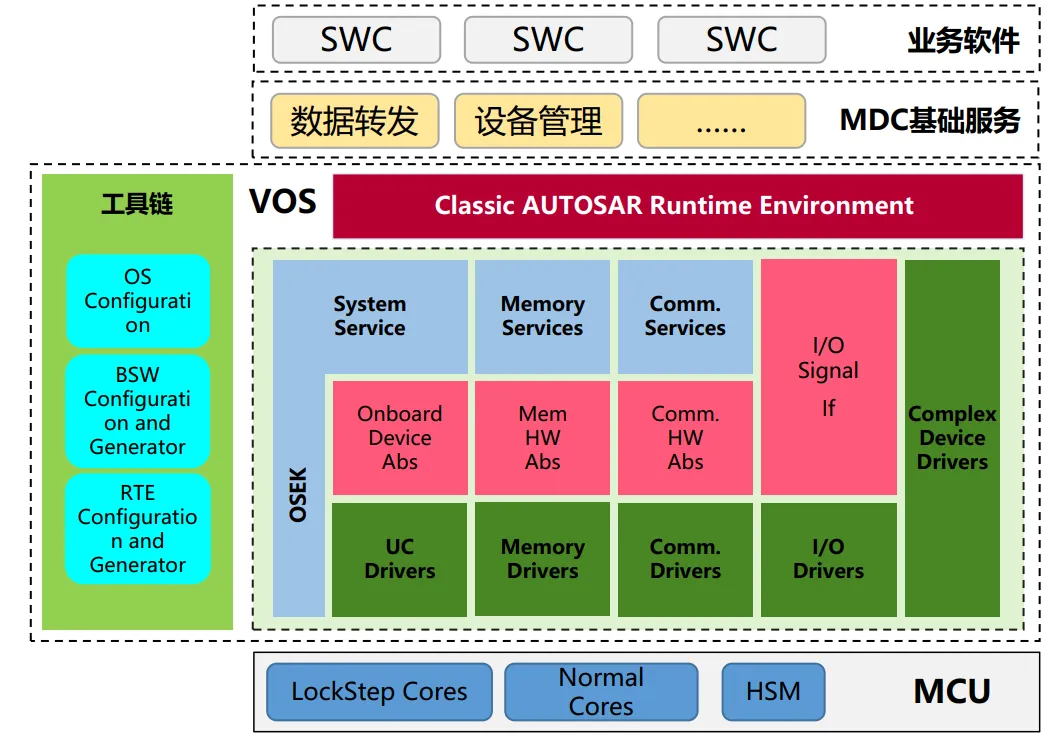
▲图24 VOS软件框架
06.广汽埃安
2021年11月8日,广汽「星灵电子电气架构」正式发布,该架构实现了车端和云端之间的一体化集中计算,如下图所示。并且当时宣称在2023年落地量产。
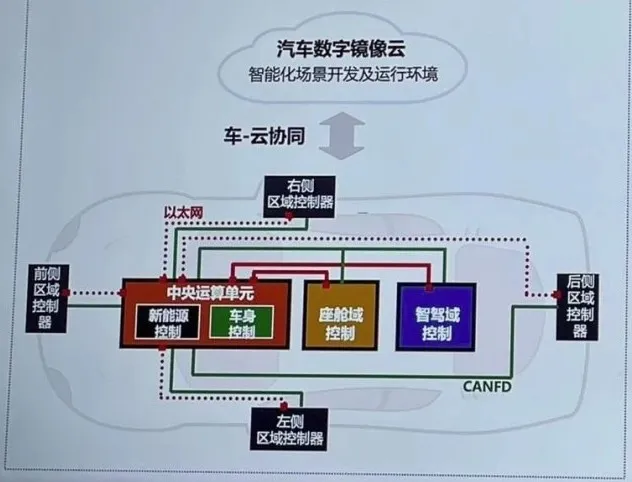
▲图25 星灵电子电气架构
如今2023年已经过去了,听说星灵电子电气架构在昊铂品牌车型上落地了,一起来看看落地的星灵架构。
首先从供电电路来看,与其他主机厂不同的是,确实如星灵架构宣传的电源备份,包括蓄电池和重要控制器供电备份,如下图所示,中央计算单元、四个区域控制器、电助力转向等都采用了双电源电路供电。
从这一点可以看出,其应该是开始做了整车级的功能安全分析,另外双电源的设计应该是主要考虑自动驾驶L3设计,当某个电源时,另一个电源能正常供电,保证自动驾驶系统能控制车子在本车道安全停下来,并且实现一系列的刹车灯点亮,安全停车后车尾应急灯能闪烁报警等操作。
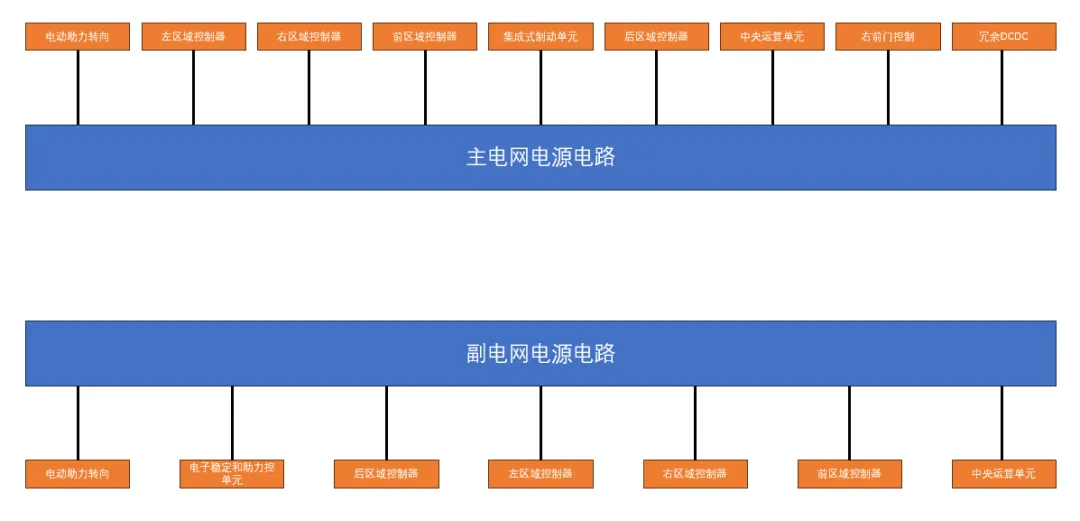
▲图26 主副电源网络
▲图27 整车双电源供电概念图
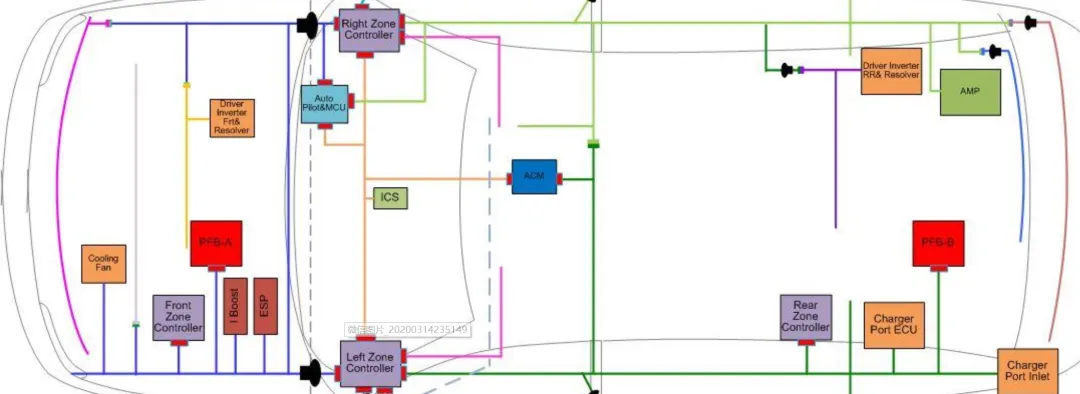
四个区域控制器负责的功能,按照就近原则来分配的,如下4张图所示。
首先是负责就近控制器的供电以及传感器数据采集、以及简单执行器的控制值,四个区域控制器对外的话,是各自通过一条CANFD总线对外的,分别为ZF_CANFD、ZL_CANFD、ZR_CANFD、ZT_CANFD,与图1的基本像是,只是当前还没有以太网链路。
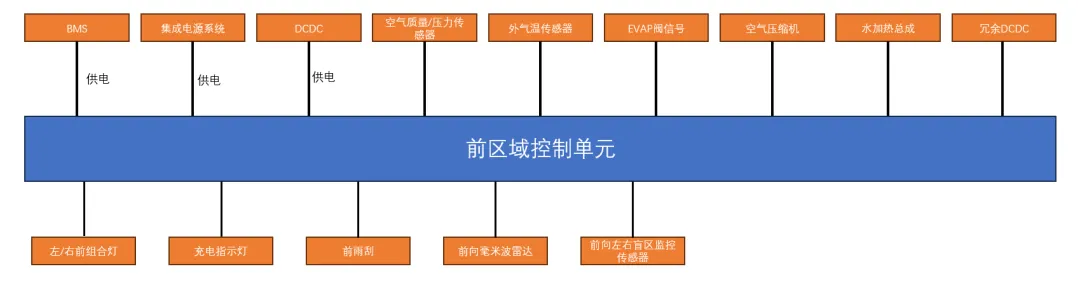
▲图28 前区域控制器
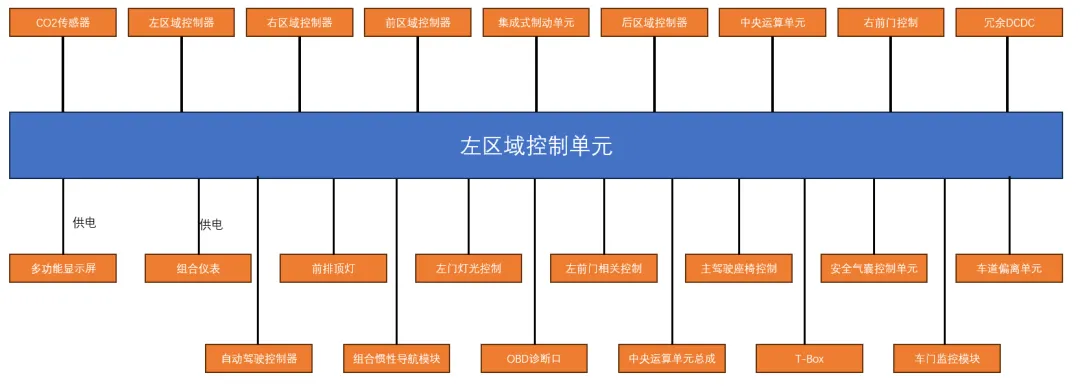
▲图29 左区域控制器

▲图30 右区域控制器
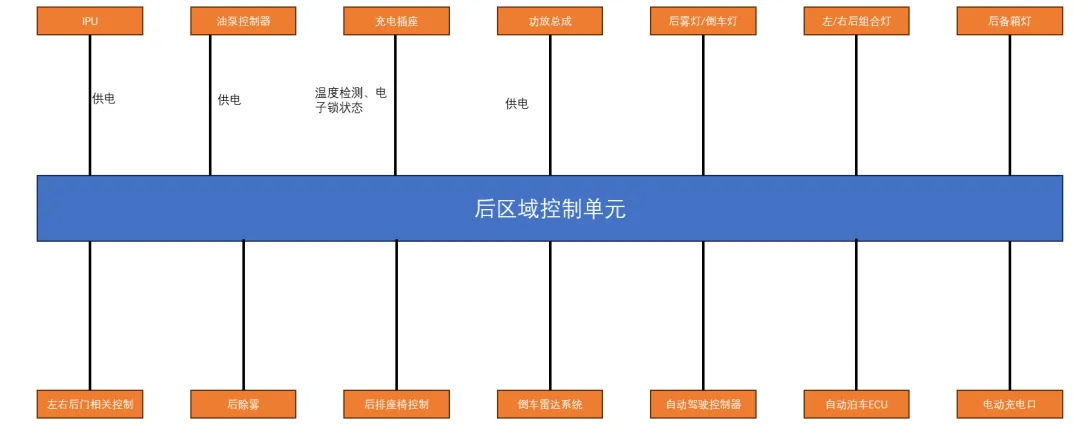
▲图31 后区域控制器
自动驾驶控制单元对外的连接如下图所示。其传感器配置为5R11V12U,对外的话主要是多路ADCX_CANFD,以及以太网总线。主控的话按照之前的介绍为华为的MDC610。
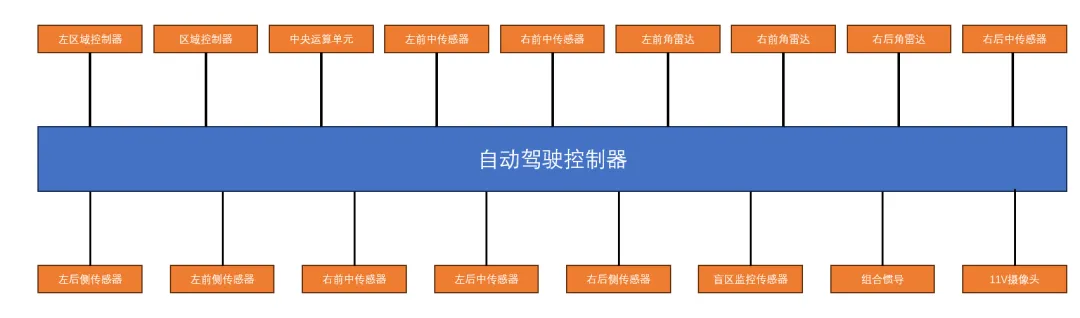
▲图32 自动驾驶控制单元
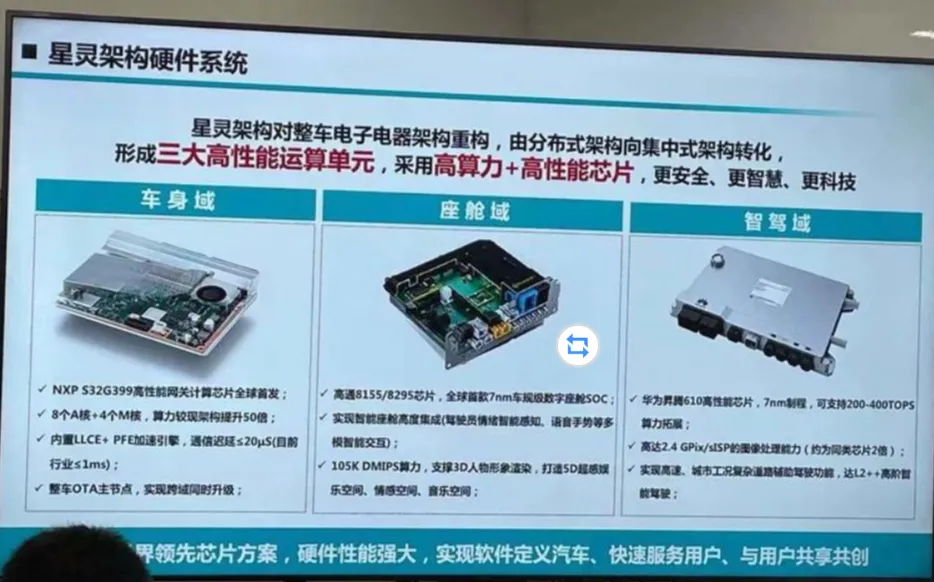
▲图33 星灵架构三大域控介绍
按照华为MDC解决方案的介绍,MDC610的主控芯片组合采用一颗Ascend 610 + 一颗英飞凌TC397,其硬件架构如下图所示。其他的跟阿维塔上的一模一样。

▲图34 MDC 610硬件架构
07.华为问界
问界M9的网络架构与阿维塔类似,毕竟都是华为系的,相较于阿维塔11,问界M9的网络架构离CC架构更近一步了。CC架构中的MDC+VDC+CDC在该网络架构中都有体现,同时也加入了三个区域控制器VIU,按照功能就近原则,就是功能部署,区域内部通过CAN/LIN通信,不同区域之间,通过以太网通信。
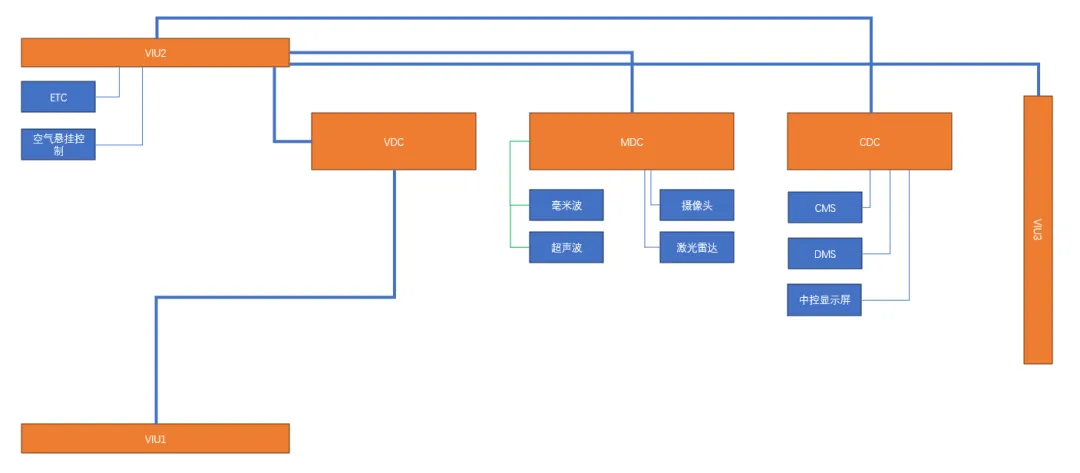
▲图35 问界M9网络架构简图
整车控制器VDC
在华为很多资料里,都可以看到VDC的存在,但是它具体的功能和逻辑是什么我们不得而知,下面我们就来揭晓一下。
VDC支撑星型网络及环网架构,承担整车控制中心的角色,响应驾驶员的各种请求(驱动、制动、转向、充电等控制)及
ADAS/ADS 请求,它负责协调控制传统车动力、底盘两大域内控制器,统筹整车横向、纵向、垂向一体化控制,彻底解决单个控制器应用场景受限,统筹协调困难,功能单一,处理能力不足等问题。此外VDC
还承担部分智能化应用,如自适应标定、哨兵模式、驾驶模式自适应、OTA、VHR、设备管理等功能。
在硬件接口上,VDC由常电、IG电、主继电器供电。连接CHSCAN与EPCAN与DIAGCAN与RNDTCAN与GLOBALCAN,连接油门踏板、制动踏板开关进行模式控制、行驶控制等;连接所有水泵与空调系统实现热管理功能,以及连接
BMS 控制上下电等功能。
在问界M9上,VDC的功能主要包括六部分,分别为人机交互、电源管理、外接充放电管理、扭矩控制、热管理、故障诊断及处理。
1.人机交互包括以下几部分:
油门识别:通过采集踏板的两路电压信号进行相关处理和判断以实现对加速踏板的合理性监测,以获取加速踏板的有效状态和开度。
制动识别:通过采集踏板的两路信号状态进行判断,以获得制动踏板的有效状态。
档位控制:正确解析驾驶员换挡意图、确保整车行驶安全:通过对车速信号、加速踏板位置、刹车状态、挡位输入信号、故障状态信号对驾驶员挡位请求信号进行保护并输出相应的挡位信号,同时需考虑
APA 功能的档位管理。
驾驶模式:驾驶模式(节能、舒适,运动,个性化),需用户切换开关。
维修模式:仅车辆静止时可开启维修模式,维修模式开启后各高压零部件保持唤醒状态,但整车高压下电。
车速计算:接收 ESC 车速信号,若 ESC 车速无效,根据电机转速、轮胎直径及减速比计算车速,
剩余里程计算:根据 SOC 和百公里平均电耗估算车辆剩余可行驶的里程。
能耗计算:根据所行驶的距离和对应的总耗电量,估算车辆每百公里消耗的电量(本次行程、自上次充电行程、小计行程、百公里平均电耗计算)。
能量流显示:按照车辆处于驱动或者是能量回收的状态,并考虑驱动和回收功率的大小,设置能量流。
制动灯控制:由于滑行能量回收造成的车辆减速度大于一定值,请求点亮制动灯。
2.电源管理包括:
休眠唤醒控制:系统能够按照设计,执行车辆的唤醒与全部控制器的低压待机与休眠。
高压上下电控制:高低压上电工作流程:电源模式为 ON一系统上低压电一整车域控制器自检和故障诊断一起动请求一整车域控制器检测系统当前没有故障并满足上高压电的条件一上高压电一使能电机控制器一电机开始准备工作。高低压下电工作流程与高低压上电流程相反,需要先下高压电,然后再下低压电。
智能低压充电:EBS 定时自我唤醒,基于低压蓄电池电压判断有充电需求时,唤醒整车完成智能低压充电。Ready灯是车辆可行驶状态指示灯,此灯点亮,表示车辆已准备就绪,能挂入
D 档或者 R 档正常行驶。
3.外接充放电管理包括:
外接交流充电:通过外接电源使用直流充电机/站为动力蓄电池组充电。完成外接交流充电线缆连接后由 BMS
进行充电需求计算,并控制车载充电机向动力电池充电。
外接直流充电:通过车载充电机将公共电网的电能变换为动力蓄电池组所需的直流电,并给其充电。用户连接直流充电桩与车辆后,由
BMS 与充电桩进行相关交互,系统协同完成外接直流充电功能。
V2L:完成外接放电线缆连接后,由 BMS基于外接负载需求进行放电需求计算,并控制车载充电机进行放电。
V2V:连接车对车充电线缆,车辆可以对其他车辆进行充电。
·快、慢放电枪同时连接,响应最先连接的放电枪需求。
放电启动时,按压启停按键可启动放电,车辆不可挂挡行驶。
·放电期间,可以正常使用空调,为保证电池电量和效率不建议使用。
放电期间,按压启停按键可停止放电,拔枪后可挂挡行驶。
4.扭矩控制主要是根据驾驶员的行驶意图和车辆的行驶工况,计算输出对应的扭矩需求。
加速踏板扭矩解析:系统能基于用户踩下踏板的深度,解析出驾驶需求扭矩。加速踏板开度信号和实际车速信号为输入,不同的挡位输出不同的加速踏板需求扭矩。
蠕行功能:在 Ready 状态下,车辆处于可行驶挡位,未踩加速踏板和制动踏板前提下,使整车以一定目标车速进行低速行驶。
预扭矩:整车处于可行驶状态下,车辆静止,为防止齿轮间隙引起的整车抖动,VDC依据档位请求小扭矩以消除齿轮间隙。
防溜坡:在坡道小于 15%,在自动驻车功能未激活的情况下,动力系统通过施加适当扭矩防止车辆溜坡或减缓溜坡现象。
滑行能量回收:车辆达到一定车速后,用户松开加速踏板和制动踏板,车辆滑行时,驱动系统倒拖发电。
制动能量回收:车辆达到一定车速后,用户踩下制动踏板后,ESC 根据整车回馈能力,请求驱动系统倒拖发电。
自适应巡航控制:自适应巡航控制功能激活时根据当前工况和驾驶员设定速度,系统判断给整车域控制器发送扭矩请求或给车身稳定系统发出制动请求,以保持按驾驶员设定的巡航速度或与前车保持相同速度跟随前车行驶。
5.整车的热管理控制
高温回路热管理主要是电机回路的热管理控制,包括电机回路冷却控制;电机回路余热回收控制。
电机回路冷却控制:VDC根据 OBC、DCDC、MCU、IGBT、水温,以及温度变化率得到各件的冷却请求,通过冷却请求控制散热风扇、水泵的工作状态,让
OBC、DCDC、MCU、IGBT 工作在一个合适的温度范围内。
电机回路余热回收:通过电机出水口的温度以及电芯的温度,判断电池是否有加热需求,以及电机是否允许加热,并通过控制三通阀动作以及电池水泵与电机水泵的开度,将电机回路的热水引入电池,实现用电机产生的废热对电池进行加热的目的。
低温回路热管理主要是电池回路的热管理控制,包括电池的加热与冷却、插枪保暖远程预约加热功能。
电池的加热与冷却通过监测电芯的最高温度、电芯最低温度、PTC 出口水温、电池入口水温,通过控制四通阀的开度,PTC/CMP
的开启,水泵的开度实现电池加热、冷却的功能。
插枪保暖:在充满电后利用充电桩的电继续对电池进行加热、冷却,并保持一定时间,确保第二天用车时,电池在一个可以高效工作的温度区间。
空调控制:根据空调发送 CMP/PTC 开启请求信号,并依据整车状态,整车可用功率情况,控制 CMP/PTC的开启与关闭以及空调的最大功率,并根据空调对风扇的请求控制风扇的动作。
6.故障诊断及处理则是执行故障的检测及故障等级的上报。以及接收或监测各系统运行状态,判断故障等级,并根据故障级别执行相应的故障处理措施,确保整车安全平稳的运行。
智能驾驶控制器MDC
问界M9的智驾功能框图如下所示,支持高速和城区领航功能。对于MDC到底是MDC810还是610,目前看网上从渠道确认的消息来看,还是MDC610。主控芯片组合采用一颗Ascend
610 + 一颗英飞凌TC397。与上述的阿维塔的是一样的。

MDC610主控芯片组合采用一颗Ascend 610 + 一颗英飞凌TC397。其各项指标如下所示:
区域控制器VIU
区域控制器在问界M9上共用3个,分别为VIU1/VIU2/VIU3,三个区域控制器的功能范围如下图所示。相较于在广汽星灵架构,有个明显的区别是,广汽的星灵架构下,每个域控对外只有一路CANFD网络,而问界M9则有很多路CAN对外的。
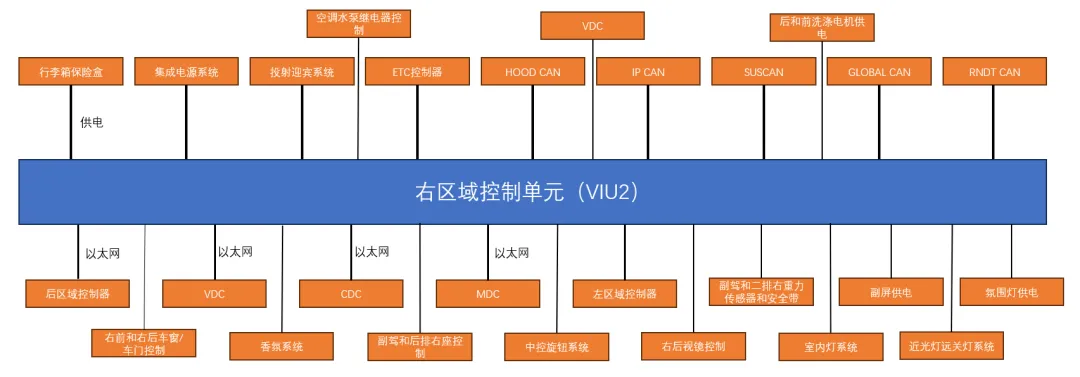
▲图 问界M9 右区域单元功能框图
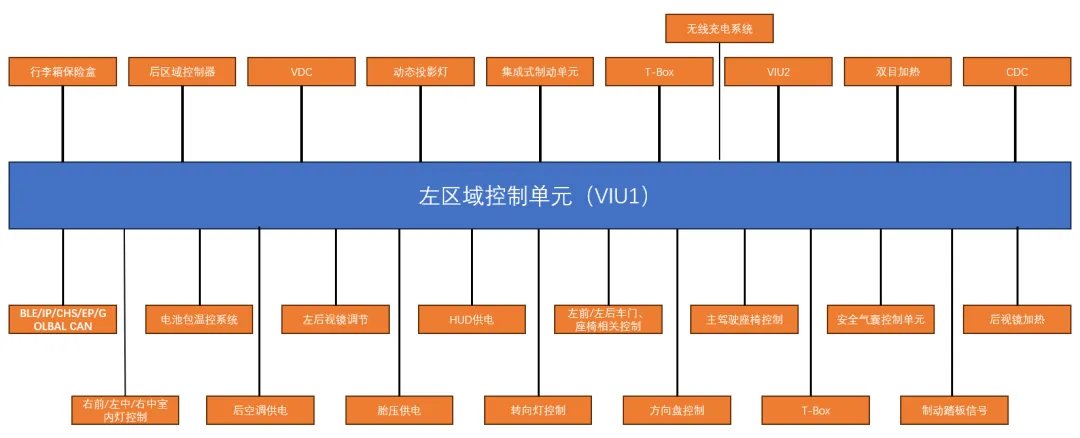
▲图 问界M9 左区域单元功能框图

▲图 问界M9 后区域单元功能框图
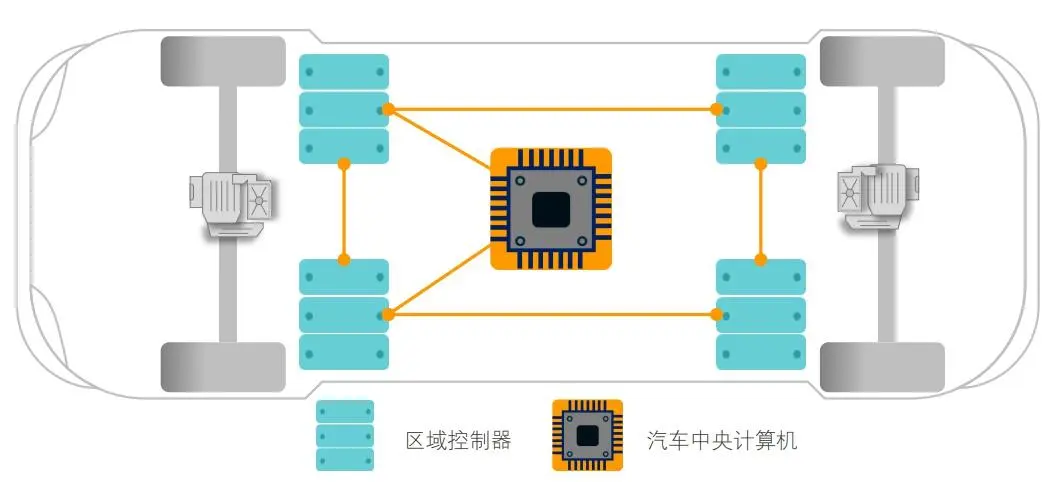
08.小米汽车
首先整体来说,跟华为问界M9的差不多,从域控到区域控制器演变的交叉域控架构,智驾控制器+座舱控制器+整车控制器+区域控制器。前、左、右、后四个区域控制器,其实是将车身控制器按照就近原则。
首先是智驾域控制器,其局部的电气图如下图所示。主要与整车中央域控制器、座舱控制器相连。其中与中央域控的连接为100M
BASE1以太网,与激光雷达连接的为1000M以太网。有一点值得注意的是,智驾域控上做了一路CAN线的预留,暂时还不知道作用。
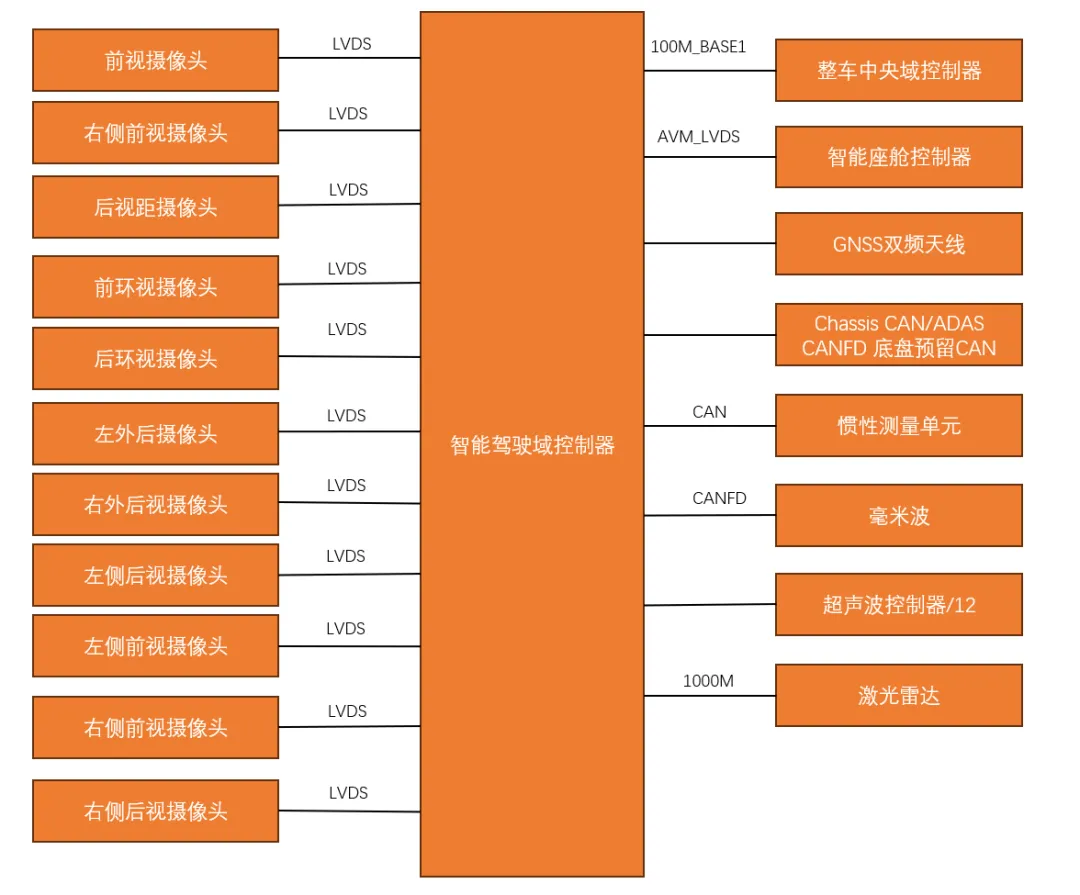
智能驾驶控制器采用的是水冷散热,主控芯片型号为两颗英伟达DRIVE Orin X算力芯片,型号为TA990SA-A1。

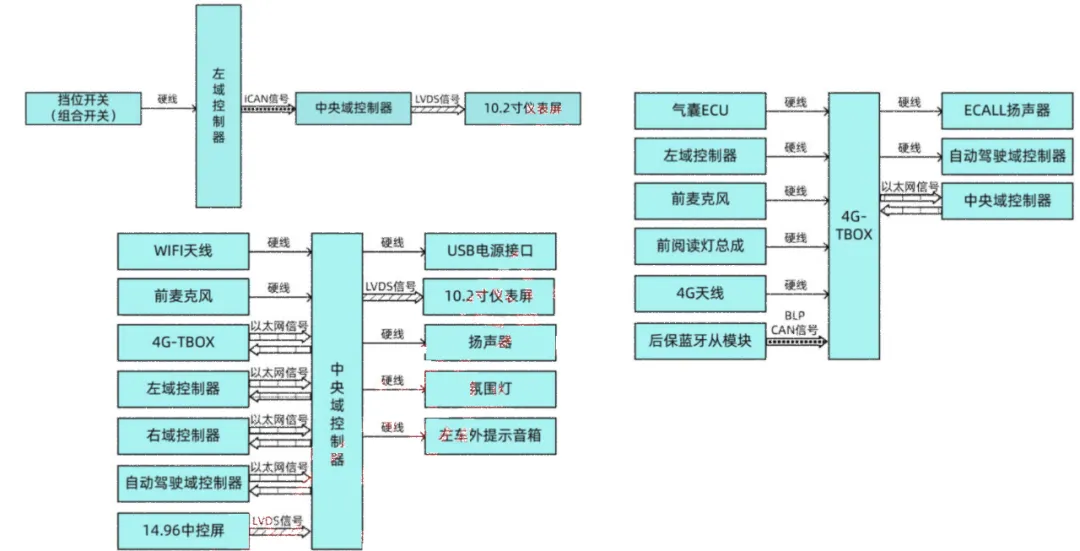
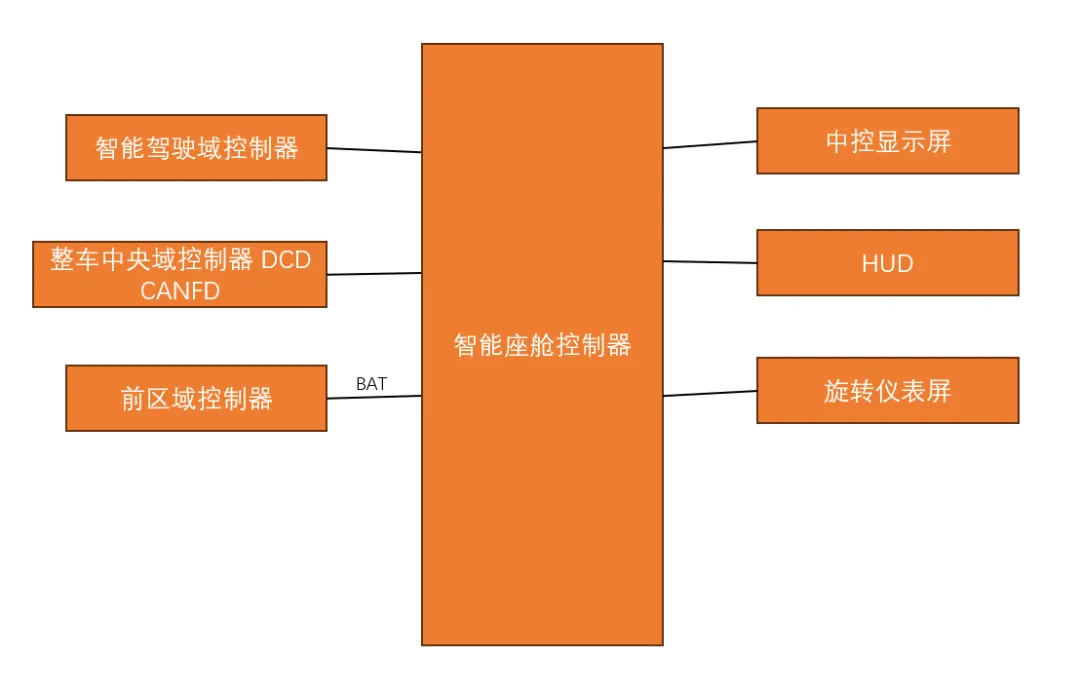
在智能座舱控制器方面,从当前的资料来看,其局部网络如下图所示,其供电通过前区域控制器供电,通常智能域控还会与各区域控制器进行交互,比如车窗的控制、空调的控制等,但是当前的资料里没有描述这一部分,后续拿到详细资料进行补充。
主控芯片是SA8295P芯片,周围围绕了四颗PM8295AU电源芯片来驱动。控制器采用的是风扇风冷散热,制造商为德赛西威。
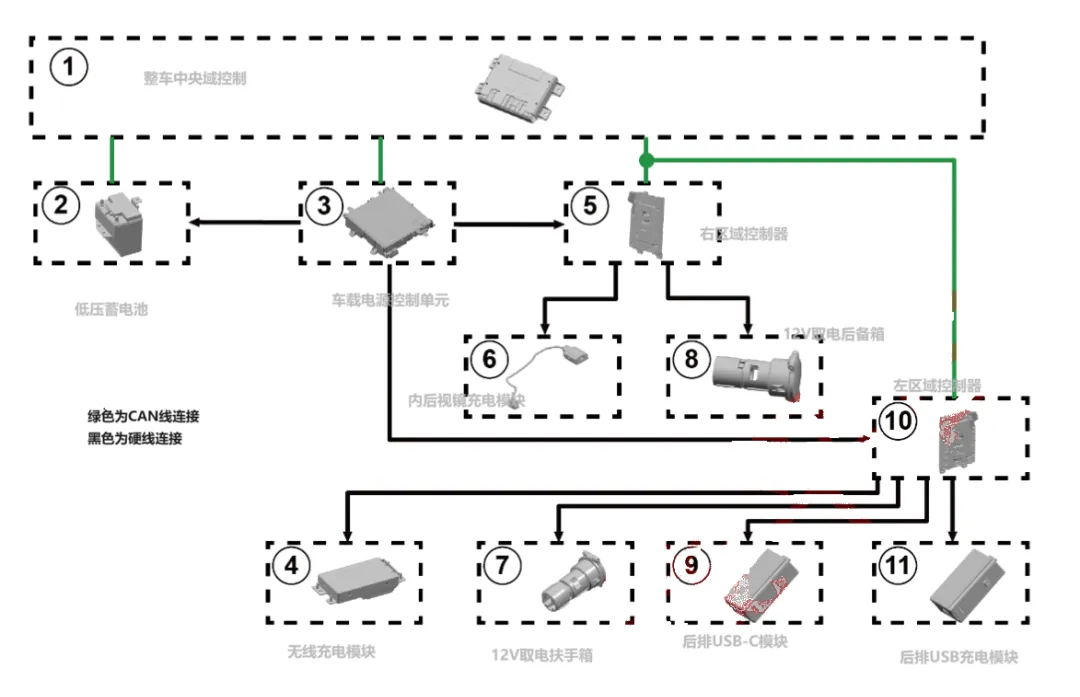
以下是各个局部区域的电气架构,首先是充电子网,如下图所示,各个控制器如下图上标注所示。其主控为整车中央控制器,主要链路为CAN。
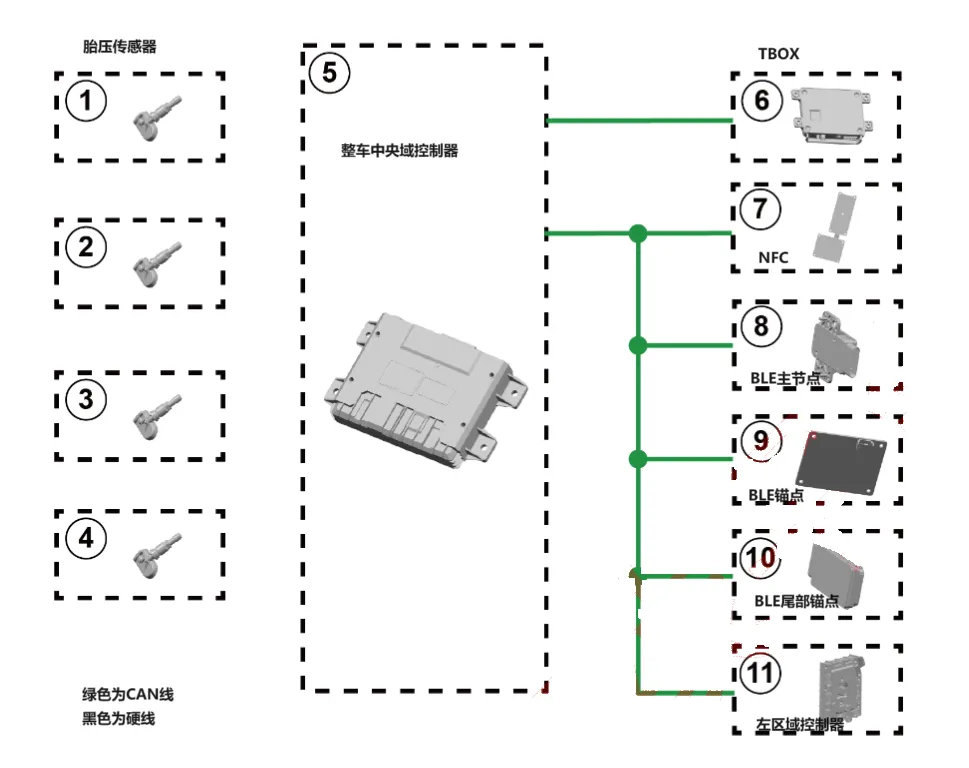
下面是胎压传感器的子网络,胎压传感器与BLE节点通过蓝牙连接,其主要处理则是在整车中央域控制器。
下面则是组合开关和方向盘上的按键,其主要通过左区域控制器,左区域控制器域各个小总成通过LIN连接,区域控制器与整车控制器之间通过CAN与连接。
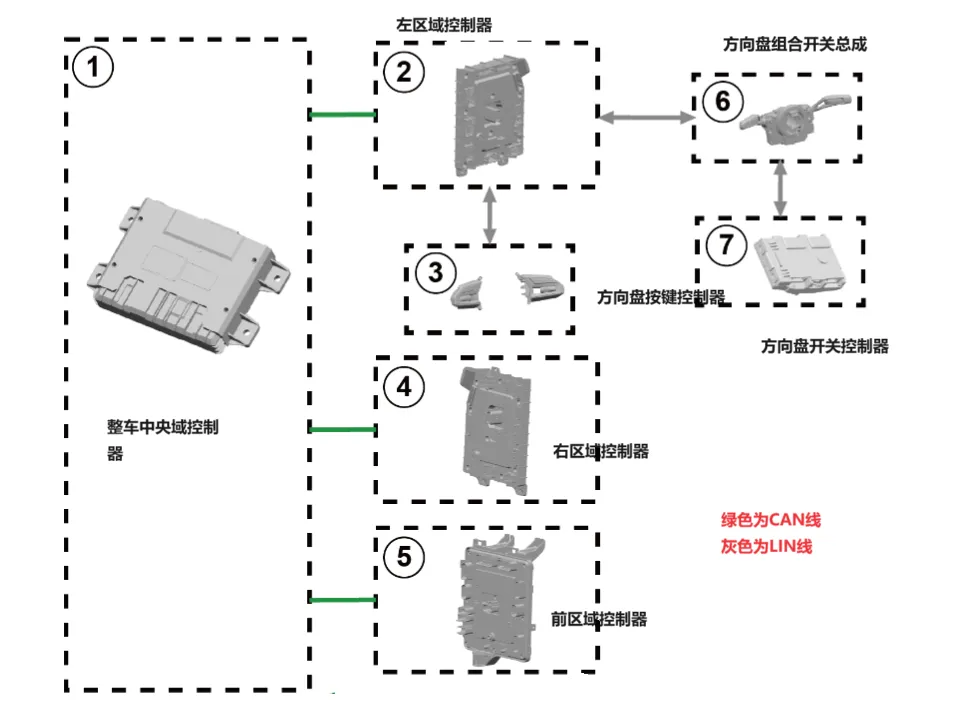
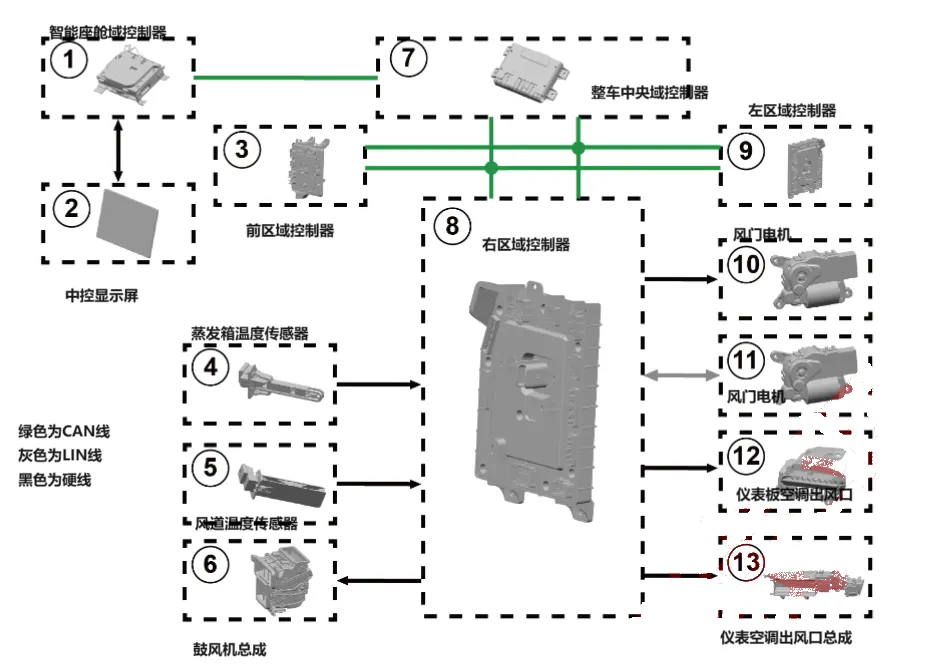
接下来则是空调系统,如下图所示,其主要通过右域控制器来控制。
红旗发布了其“新能源子品牌”的首款车型EH7,基于全新的FMEs“旗帜”超级架构所打造。那这个全新的架构下其电气架构信息是啥样的呢?咱来梳理梳理。
首先跟之前梳理的其他几家OEM最新车型的电气架构类似,也是采用了域控制器,包括智能通信域控制器、智能车控平台控制器、自动驾驶域控制器。除此之外将原来的车身控制器进行拆分成几个区域控制器,在红旗最新电气架构上,拆分成了三个,分别为前、中、后智能区域控制器。
09一汽红旗
首先跟之前梳理的其他几家OEM最新车型的电气架构类似,也是采用了域控制器,包括智能通信域控制器、智能车控平台控制器、自动驾驶域控制器。除此之外将原来的车身控制器进行拆分成几个区域控制器,在红旗最新电气架构上,拆分成了三个,分别为前、中、后智能区域控制器。
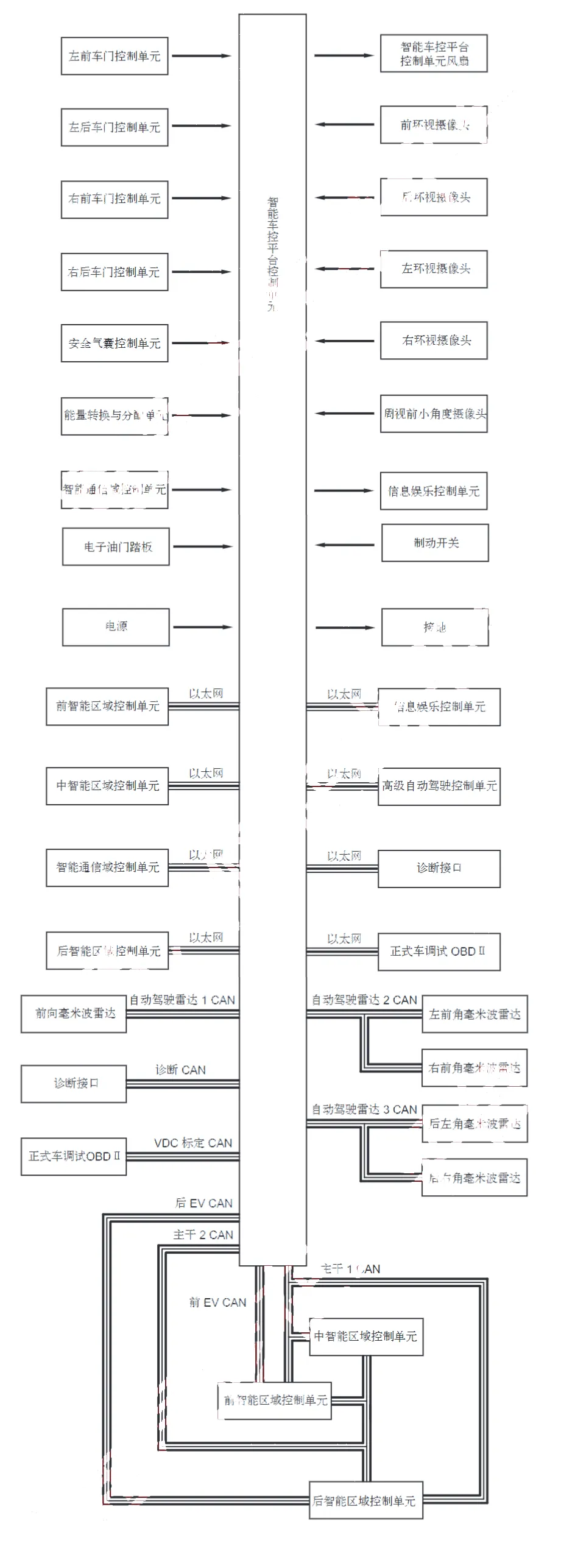
智能车控平台控制器
智能车控平台控制器是基于整车控制器发展而来,其拥有8个以太网接口,其中自动驾驶控制器、信息娱乐控制和智能通信域三个都是千兆以太网连接,其他三个前、中后区域控制器都是百兆以太网,诊断和OBD也是百兆以太网。这种配置配置还是相当可以的,通常与其他区域控制器的通信,当前主流采用的是CANFD,EH7这套为后续需的扩展预留了大量的带框和部署灵活性。智能车控平台控制器的系统图如下图所示。
▲图 智能车控平台控制器系统图
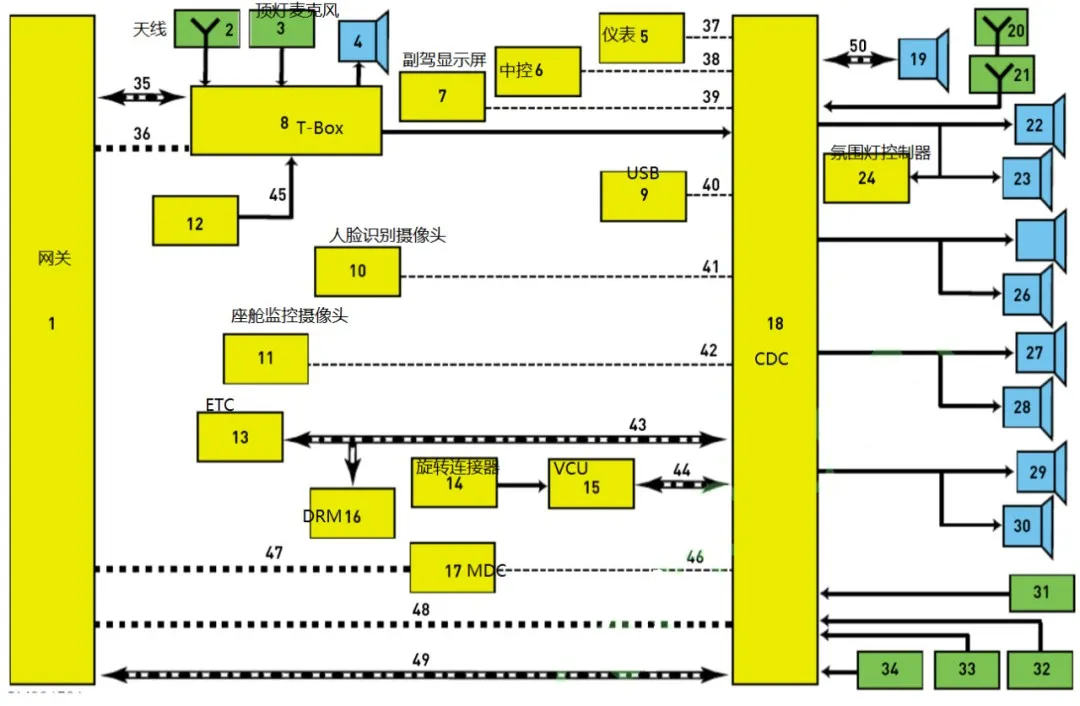
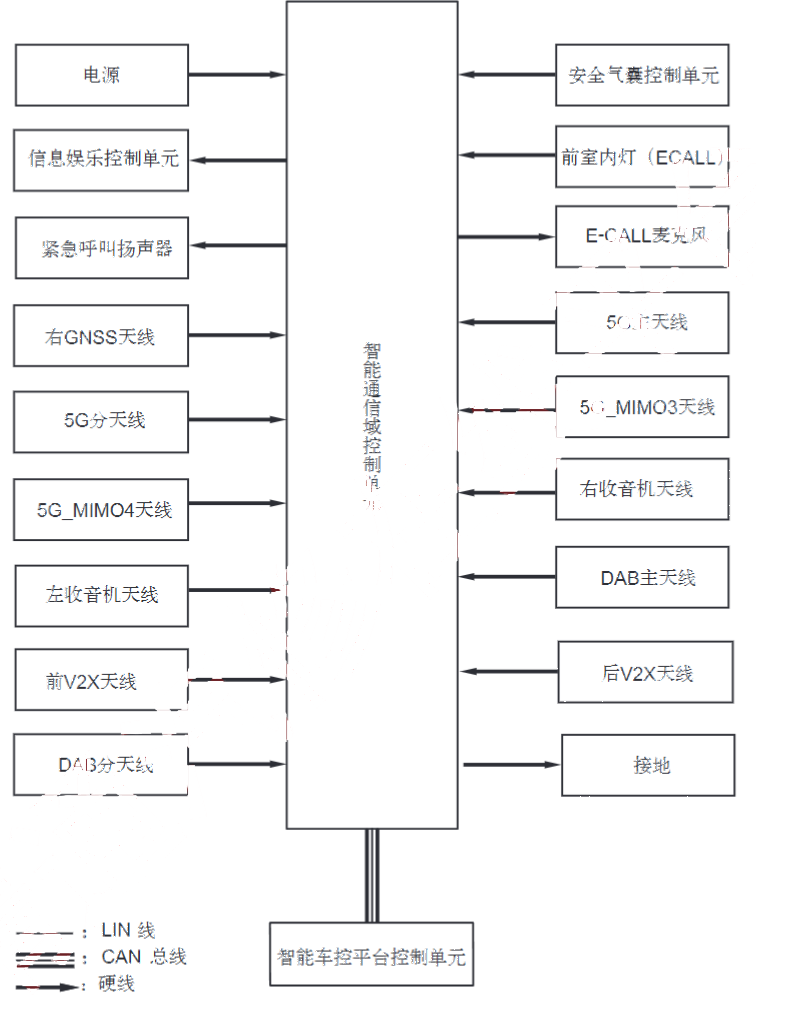
智能通信域控制器
智能通信域控制器是基于T-box发展而来,但是相较于T-box,复杂度显著提高。集成了GNSS天线、收音机天线、5G天线,甚至还预留了V2X天线,这个在其他主机厂的车型上是没有见过的,具体的智能通信域控制器的系统图如下图所示。
▲图 智能通信域控制器系统图
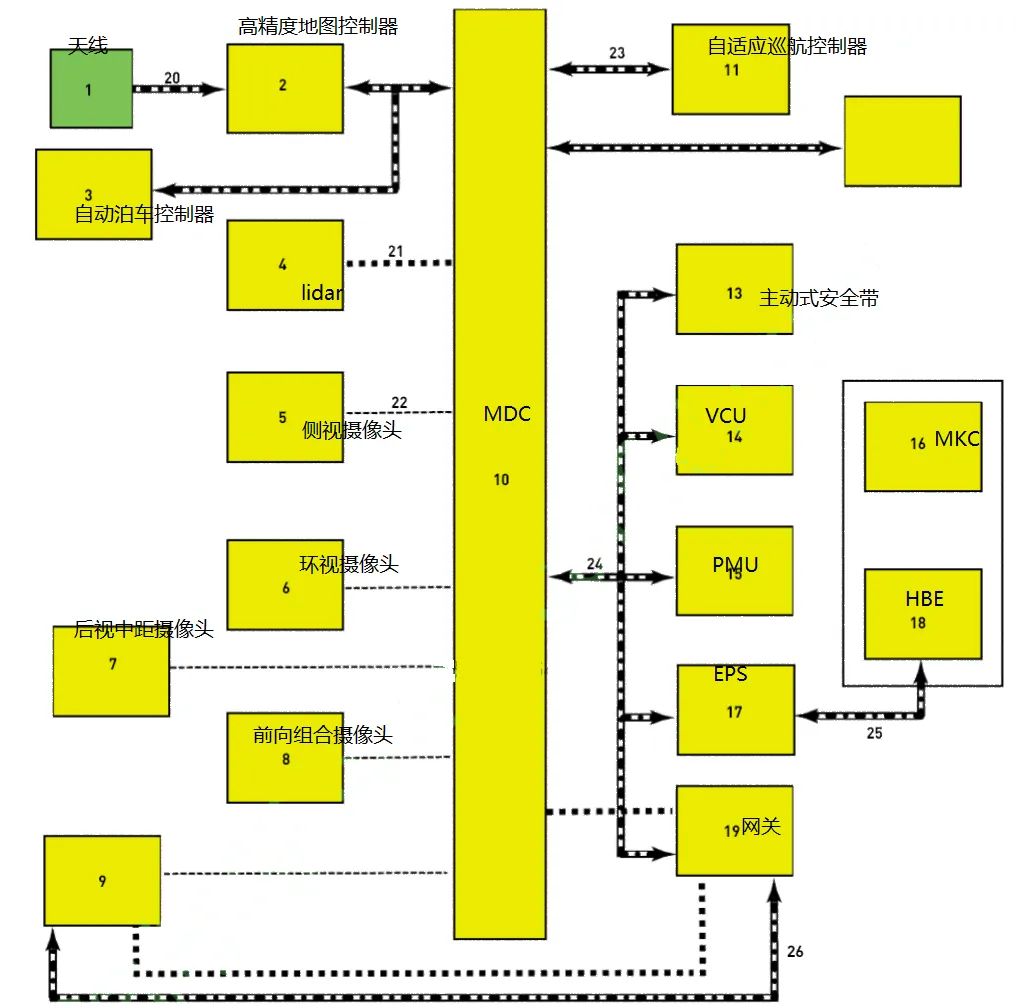
智能驾驶控制器
EH7的智能驾驶系统配置是相当的豪华,顶配的存在,总共12个摄像头,5个毫米波雷达12个摄像头3个激光雷达,即12V5R3L的配置,整个自行驾驶控制器的系统图如下所示。

▲图 智能驾驶域控制器系统图
据网上消息采用的可能是福瑞泰克的ADC30域控制器。ADC30域控制器基于3颗地平线征程5芯片、2颗TDA4VH以及2颗英飞凌TC397的架构。3颗征程5主要做BEV鸟瞰图。高精度地图处理、传感器融合、轨迹预测、行为决策、路径规划和自动泊车由TDA4VH负责。两颗TC397有一颗是冗余,是目前国内安全冗余最强的设计。

▲图 福瑞泰克的ADC30系统图

▲图 福瑞泰克的ADC30架构图
智能区域控制器
智能区域控制器包括三个,其中前智能区域控制器为车辆前部的传感器供电,包括毫米波雷达、超声波雷达、激光雷达、集成制动控制器等,另外通过LIN线与雨刮、水暖PTC、前蓄电池进行通信,具体前智能区域控制器的电气图如下所示。
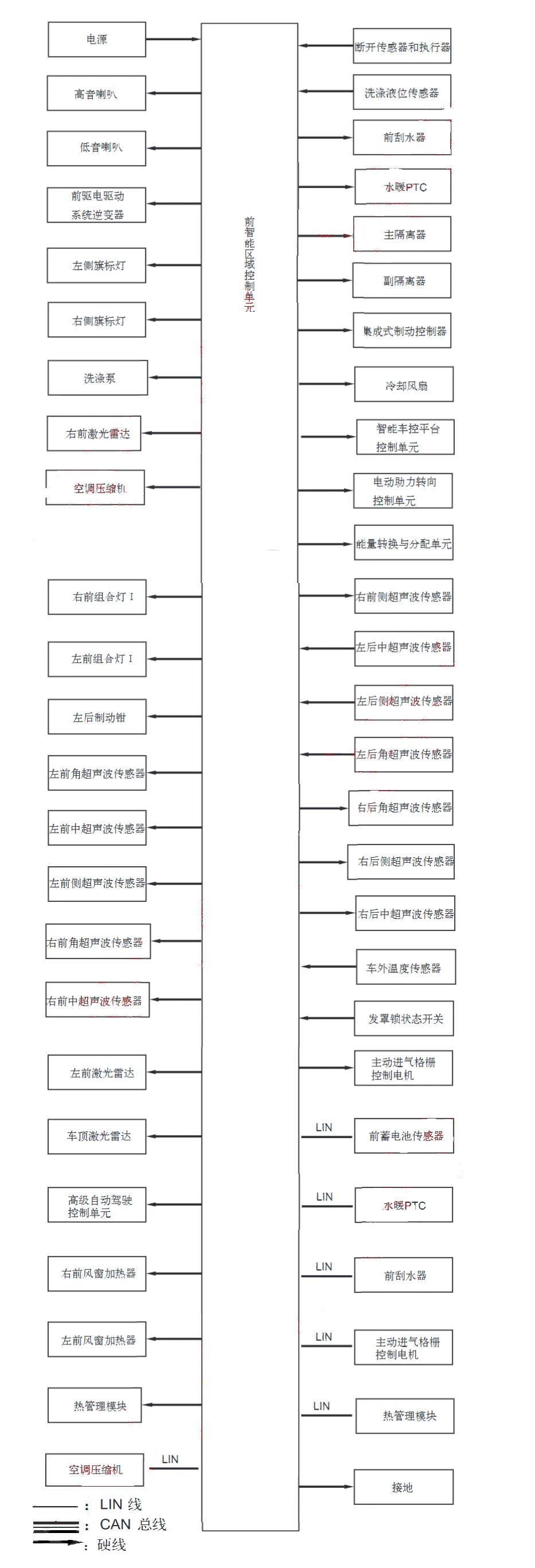
▲图 前智能驾驶区域控制器系统图
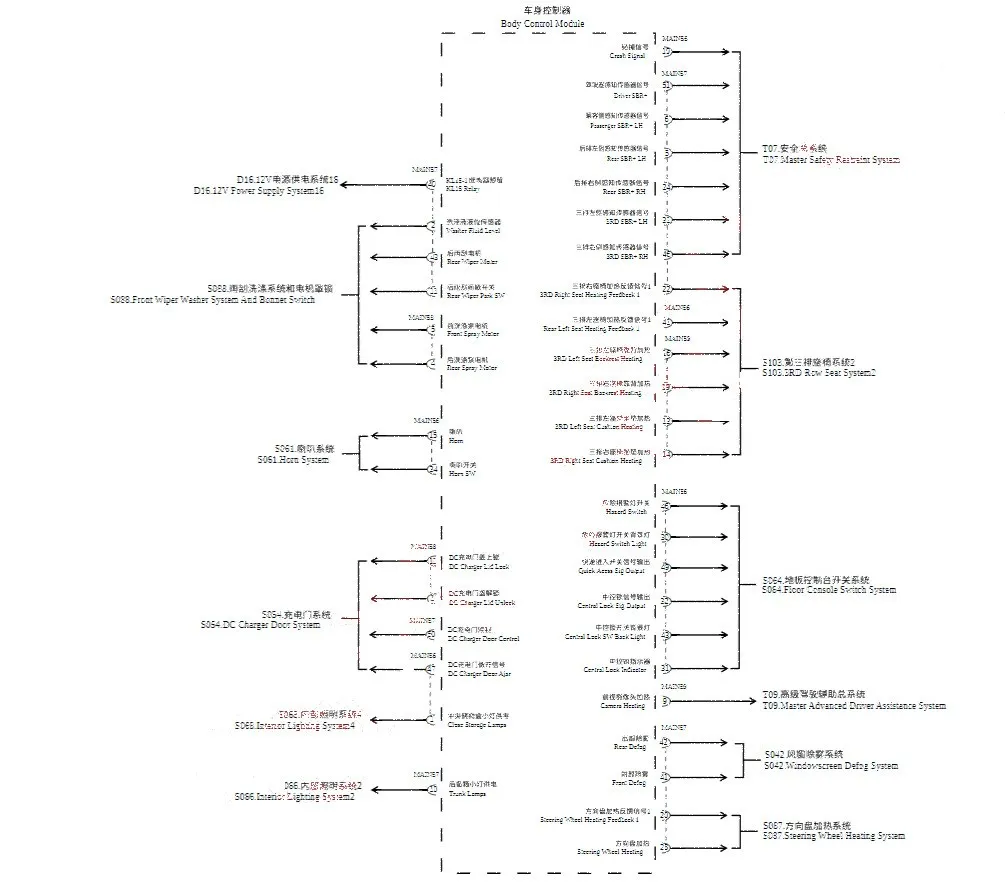
中智能区域控制器涉及到的东西就多了,类似于小米SU7上左、右区域控制器的功能。包括所有车门、氛围灯、组合开关、中控等。跟所有执行器控制单元的交互,主要通过LIN总线来实现,具体中智能区域控制器的电气图如下所示。

▲图 中智能驾驶区域控制器系统图
后智能区域控制器与问界M9、小米SU7等车型的后区域控制器功能是类似的,主要控制车辆后部的一些执行器的供电和LIN总线控制,具体控制的辅件如下图所示。
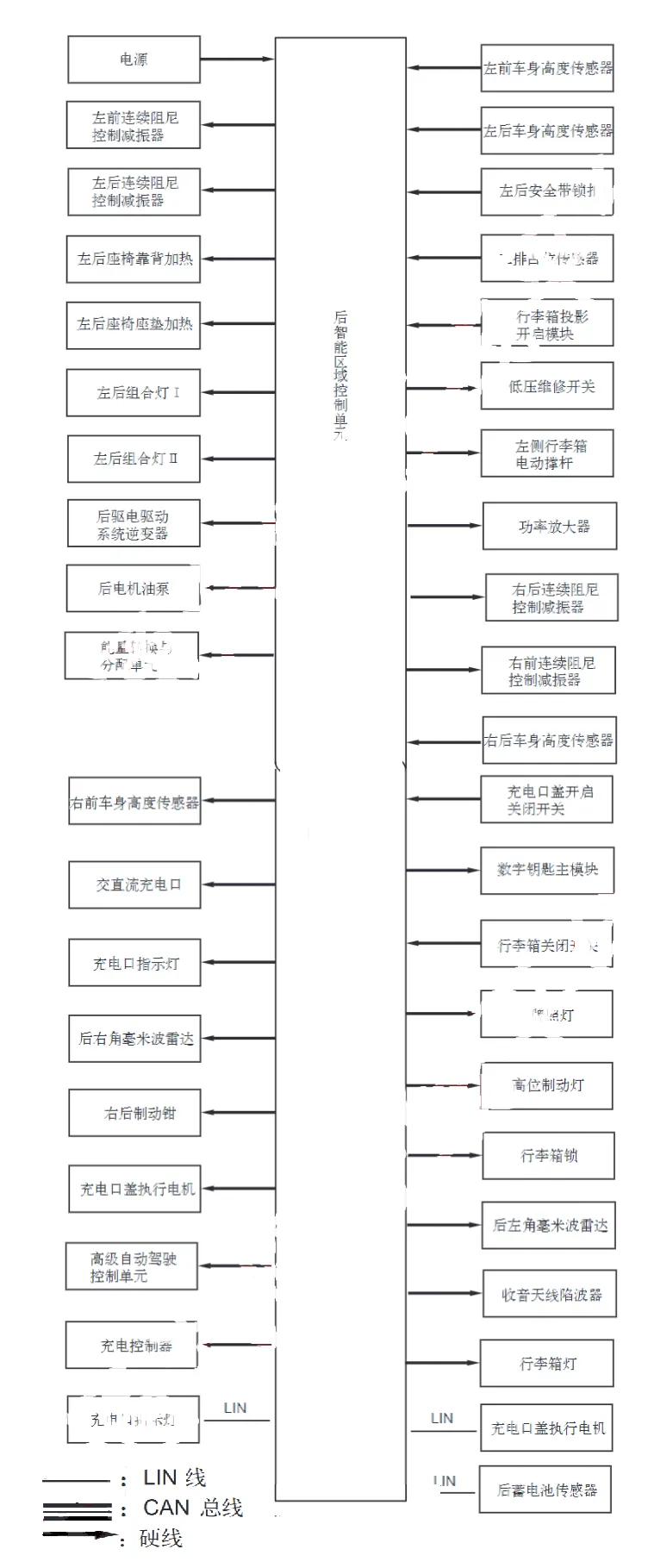
▲图 后智能驾驶区域控制器系统图
配电网络
最后来看看EH7各控制器的配电,在EH7上采用了电源冗余的配置,也就是双电源,独立供电,这一点在在当前其他主机厂的车型了也少见,记得上一个是广汽昊铂上的星灵电子电气架构。
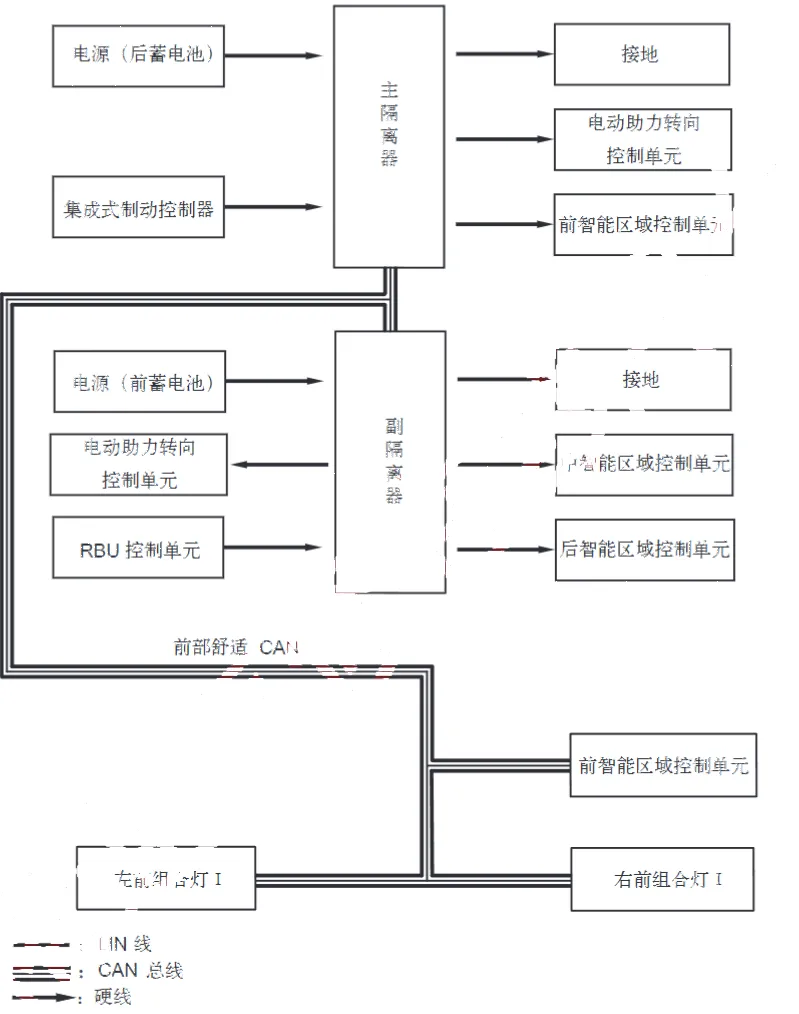
▲图 EH7配电网
|








