| 编辑推荐: |
|
本文主要介绍了嵌入式必懂的 CAN 总线知识相关内容。
希望对你的学习有帮助。
本文来自于微信公众号EDC电驱未来,由火龙果软件Linda编辑,推荐。 |
|
嵌入式的工程师一般都知道CAN总线广泛应用到汽车中,其实船舰电子设备通信也广泛使用CAN,随着国家对海防的越来越重视,对CAN的需求也会越来越大。
概述
CAN(Controller Area Network)即控制器局域网,是一种能够实现分布式实时控制的串行通信网络。
想到CAN就要想到德国的Bosch公司,因为CAN就是这个公司开发的(和Intel)。
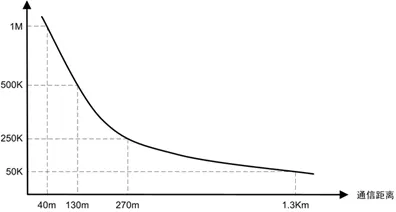
CAN有很多优秀的特点,使得它能够被广泛地应用。比如:传输速度最高到1Mbps,通信距离最远到10km,无损位仲裁机制,多主结构。
近些年来,CAN控制器价格越来越低,很多MCU也集成了CAN控制器。现在每一辆汽车上都装有CAN总线。
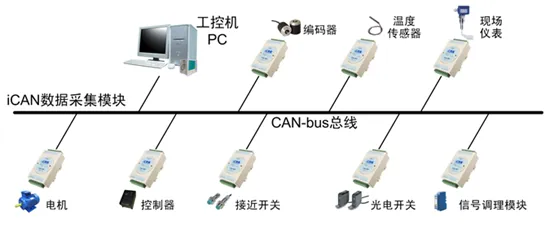
一个典型的CAN应用场景:
CAN总线标准
CAN总线标准只规定了物理层和数据链路层,需要用户自定义应用层。不同的CAN标准仅物理层不同。
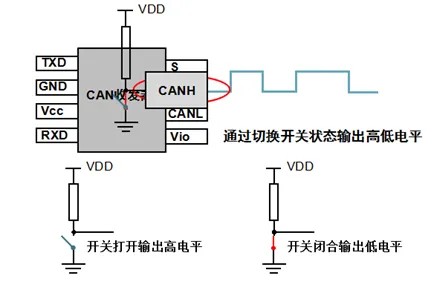
CAN收发器负责逻辑电平和物理信号之间的转换。
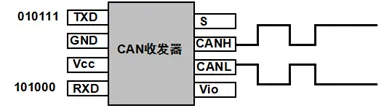
将逻辑信号转换成物理信号(差分电平),或者将物理信号转换成逻辑电平。
CAN标准有两个,即IOS11898和IOS11519,两者差分电平特性不同。
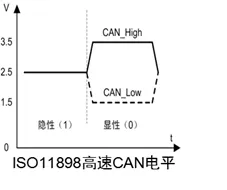
高低电平幅度低,对应的传输速度快;
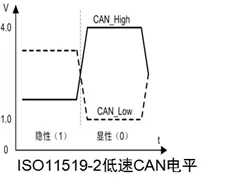
* 双绞线共模消除干扰,是因为电平同时变化,电压差不变。
物理层
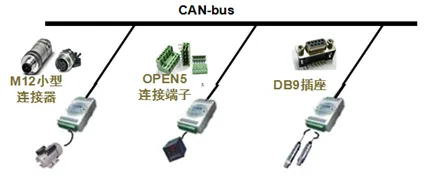
CAN有三种接口器件:
多个节点连接,只要有一个为低电平,总线就为低电平,只有所有节点输出高电平时,才为高电平。所谓"线与"。
CAN总线有5个连续相同位后,就插入一个相反位,产生跳变沿,用于同步。从而消除累积误差。
和485、232一样,CAN的传输速度与距离成反比。
CAN总线,终端电阻的接法:
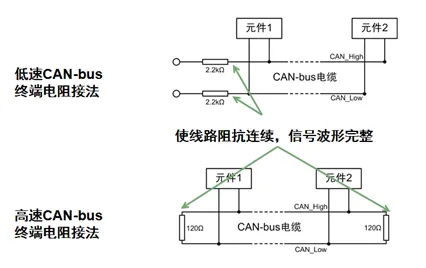
为什么是120Ω,因为电缆的特性阻抗为120Ω,为了模拟无限远的传输线。
数据链路层
CAN总线传输的是CAN帧,CAN的通信帧分成五种,分别为数据帧、远程帧、错误帧、过载帧和帧间隔。
数据帧用来节点之间收发数据,是使用最多的帧类型;远程帧用来接收节点向发送节点接收数据;错误帧是某节点发现帧错误时用来向其他节点通知的帧;过载帧是接收节点用来向发送节点告知自身接收能力的帧;用于将数据帧、远程帧与前面帧隔离的帧。
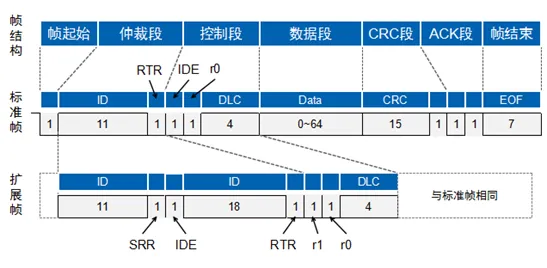
数据帧根据仲裁段长度不同分为标准帧(2.0A)和扩展帧(2.0B)
帧起始
帧起始由一个显性位(低电平)组成,发送节点发送帧起始,其他节点同步于帧起始;
帧结束由7个隐形位(高电平)组成。
仲裁段
CAN总线是如何解决多点竞争的问题?
由仲裁段给出答案。
CAN总线控制器在发送数据的同时监控总线电平,如果电平不同,则停止发送并做其他处理。如果该位位于仲裁段,则退出总线竞争;如果位于其他段,则产生错误事件。
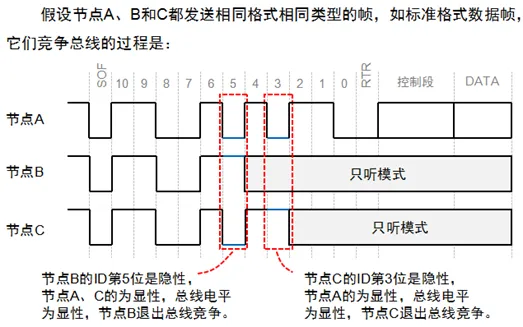
帧ID越小,优先级越高。由于数据帧的RTR位为显性电平,远程帧为隐性电平,所以帧格式和帧ID相同的情况下,数据帧优先于远程帧;由于标准帧的IDE位为显性电平,扩展帧的IDE位为隐形电平,对于前11位ID相同的标准帧和扩展帧,标准帧优先级比扩展帧高。
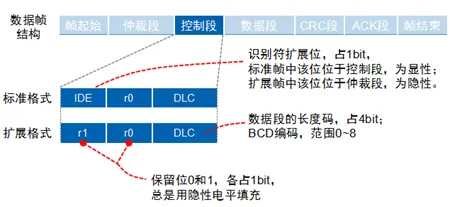
控制段
共6位,标准帧的控制段由扩展帧标志位IDE、保留位r0和数据长度代码DLC组成;扩展帧控制段则由IDE、r1、r0和DLC组成。
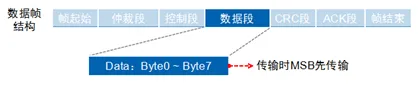
数据段
为0-8字节,短帧结构,实时性好,适合汽车和工控领域;
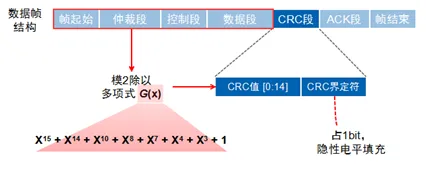
CRC段
CRC校验段由15位CRC值和CRC界定符组成。
ACK段
当接收节点接收到的帧起始到CRC段都没错误时,它将在ACK段发送一个显性电平,发送节点发送隐性电平,线与结果为显性电平。
远程帧
远程帧分为6个段,也分为标准帧和扩展帧,且RTR位为1(隐性电平)

CAN是可靠性很高的总线,但是它也有五种错误:
CRC错误:发送与接收的CRC值不同发生该错误;
格式错误:帧格式不合法发生该错误;
应答错误:发送节点在ACK阶段没有收到应答信息发生该错误;
位发送错误:发送节点在发送信息时发现总线电平与发送电平不符发生该错误;
位填充错误:通信线缆上违反通信规则时发生该错误。
当发生这五种错误之一时,发送节点或接受节点将发送错误帧。
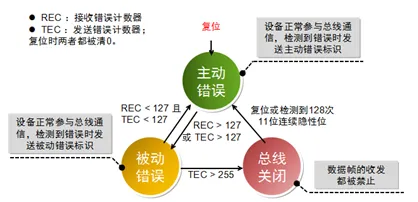
为防止某些节点自身出错而一直发送错误帧,干扰其他节点通信,CAN协议规定了节点的3种状态及行为。
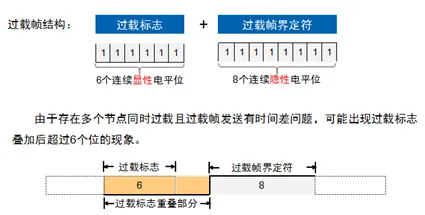
过载帧
当某节点没有做好接收的"准备"时,将发送过载帧,以通知发送节点。
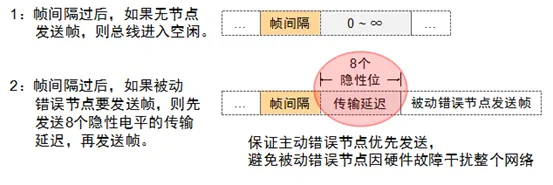
帧间隔
用来隔离数据帧、远程帧与他们前面的帧,错误帧和过载帧前面不加帧间隔。
构建CAN节点
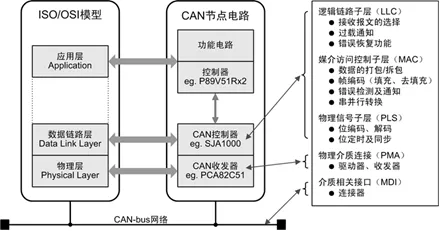
构建节点,实现相应控制,由底向上分为四个部分:CAN节点电路、CAN控制器驱动、CAN应用层协议、CAN节点应用程序。
虽然不同节点完成的功能不同,但是都有相同的硬件和软件结构。
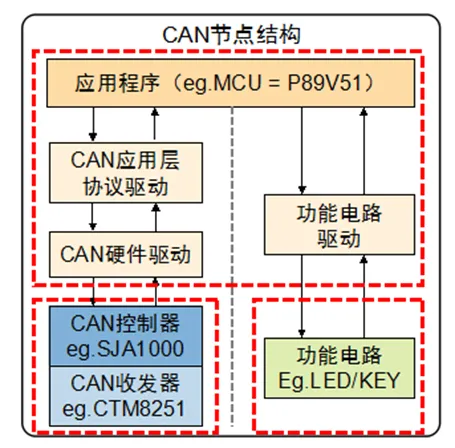
CAN收发器和控制器分别对应CAN的物理层和数据链路层,完成CAN报文的收发;功能电路,完成特定的功能,如信号采集或控制外设等;主控制器与应用软件按照CAN报文格式解析报文,完成相应控制。
CAN硬件驱动是运行在主控制器(如P89V51)上的程序,它主要完成以下工作:基于寄存器的操作,初始化CAN控制器、发送CAN报文、接收CAN报文;
如果直接使用CAN硬件驱动,当更换控制器时,需要修改上层应用程序,移植性差。在应用层和硬件驱动层加入虚拟驱动层,能够屏蔽不同CAN控制器的差异。
一个CAN节点除了完成通信的功能,还包括一些特定的硬件功能电路,功能电路驱动向下直接控制功能电路,向上为应用层提供控制功能电路函数接口。特定功能包括信号采集、人机显示等。
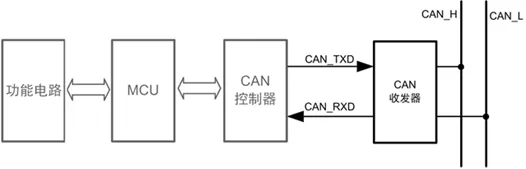
CAN收发器是实现CAN控制器逻辑电平与CAN总线上差分电平的互换。实现CAN收发器的方案有两种,一是使用CAN收发IC(需要加电源隔离和电气隔离),另一种是使用CAN隔离收发模块。推荐使用第二种。
CAN控制器是CAN的核心元件,它实现了CAN协议中数据链路层的全部功能,能够自动完成CAN协议的解析。CAN控制器一般有两种,一种是控制器IC(SJA1000),另一种是集成CAN控制器的MCU(LPC11C00)。
MCU负责实现对功能电路和CAN控制器的控制:在节点启动时,初始化CAN控制器参数;通过CAN控制器读取和发送CAN帧;在CAN控制器发生中断时,处理CAN控制器的中断异常;根据接收到的数据输出控制信号;
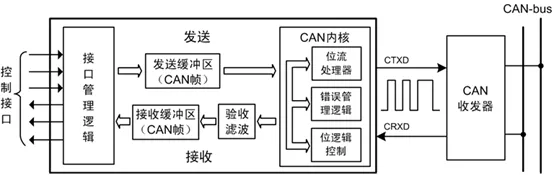
接口管理逻辑:解释MCU指令,寻址CAN控制器中的各功能模块的寄存器单元,向主控制器提供中断信息和状态信息。
发送缓冲区和接收缓冲区能够存储CAN总线网络上的完整信息。
验收滤波是将存储的验证码与CAN报文识别码进行比较,跟验证码匹配的CAN帧才会存储到接收缓冲区。
CAN内核实现了数据链路的全部协议。
CAN协议应用层概述
CAN总线只提供可靠的传输服务,所以节点接收报文时,要通过应用层协议来判断是谁发来的数据、数据代表了什么含义。常见的CAN应用层协议有:CANOpen、DeviceNet、J1939、iCAN等。
CAN应用层协议驱动是运行在主控制器(如P89V51)上的程序,它按照应用层协议来对CAN报文进行定义、完成CAN报文的解析与拼装。例如,我们将帧ID用来表示节点地址,当接收到的帧ID与自身节点ID不通过时,就直接丢弃,否则交给上层处理;发送时,将帧ID设置为接收节点的地址。
CAN收发器
SJA1000的输出模式有很多,使用最多的是正常输出模式,输入模式通常不选择比较器模式,可以增大通信距离,并且减少休眠下的电流。
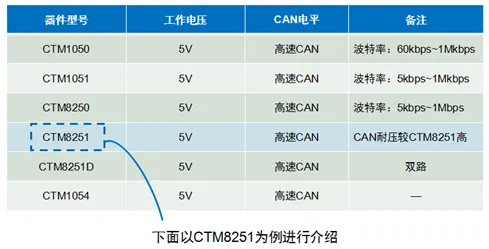
收发器按照通信速度分为高速CAN收发器和容错CAN收发器。
同一网络中要使用相同的CAN收发器。
CAN连接线上会有很多干扰信号,需要在硬件上添加滤波器和抗干扰电路:
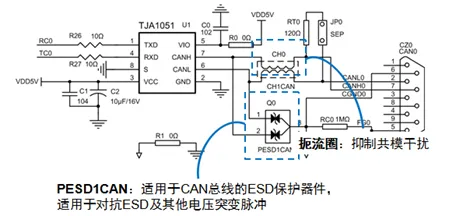
也可以使用CAN隔离收发器(集成滤波器和抗干扰电路)。

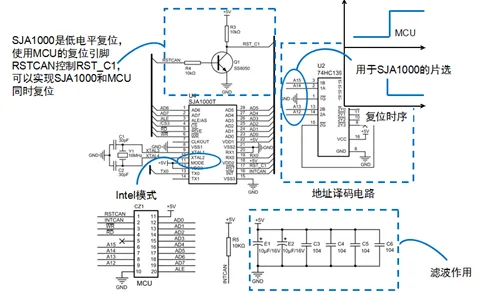
CAN控制器与MCU的连接方式:
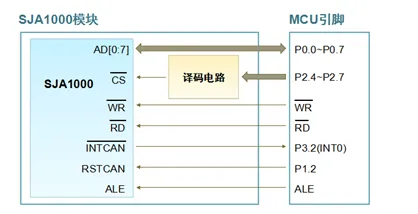
SJA1000可被视为外扩RAM,地址宽度8位,最多支持256个寄存器
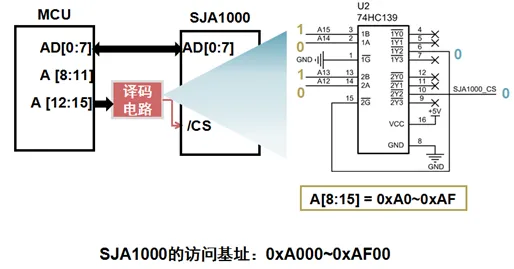
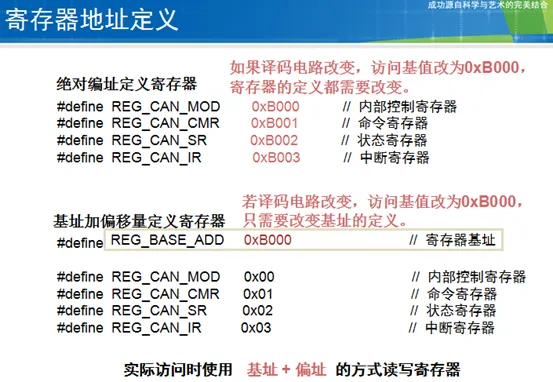
#define REG_BASE_ADDR 0xA000 // 寄存器基址
unsigned char *SJA_CS_Point = (unsigned char *) REG_BASE_ADDR ;
// 写SJA1000寄存器
void WriteSJAReg(unsigned char RegAddr, unsigned char Value)
{
*(SJA_CS_Point + RegAddr) = Value;
return;
}
// 读SJA1000寄存器
unsigned char ReadSJAReg(unsigned char RegAddr)
{
return (*(SJA_CS_Point + RegAddr));
}
|

将缓存区的数据连续写入寄存器:
……
for (i=0; i<len; i++)
{
WriteSJAReg(RegAdr + i, ValueBuf[i]);
}
……
|
将连续多个寄存器连续读入缓存区:
……
for (i=0; i<len; i++)
{
ReadSJAReg(RegAdr + i, ValueBuf[i]);
}
……
|
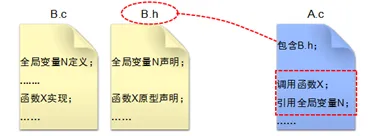
头文件包含方案:
1. 每个程序包含用到的头文件
2. 每个程序包含一个公用头文件,公用头文件包含所有其他头文件
#ifndef __CONFIG_H__ // 防止头文件被重复包含
#define __CONFIG_H__
#include <8051.h> // 包含80C51寄存器定义头文件
#include "SJA1000REG.h" // 包含SJA1000寄存器定义头文件
// 定义取字节运算
#define LOW_BYTE(x) (unsigned char)(x)
#define HIGH_BYTE(x) (unsigned char)((unsigned int)(x) >> 8)
// 定义振荡器时钟和处理器时钟频率(用户可以根据实际情况作出调整)
#define OSCCLK 11059200UL
// 宏定义MCU的时钟频率
#define CPUCLK (OSCCLK / 12)
#endif // __CONFIG_H__
|
SJA1000上电后处于复位状态,必须初始化后才能工作:
(1)置位模式寄存器Bit0位进入复位模式;
(2)设置时钟分频寄存器选择时钟频率、CAN模式;
(3)设置验收滤波,设定验证码和屏蔽码;
(4)设置总线定时器寄存器0、1设定CAN波特率;
(5)设置输出模式;
(6)清零模式寄存器Bit0位退出复位模式;
模式寄存器
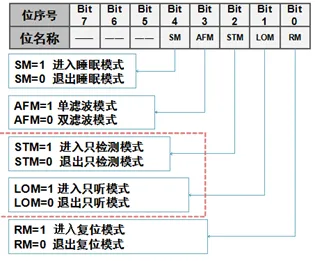
只检测模式:SJA1000发送CAN帧时不检查应答位;
只听模式:此模式下SJA1000不会发送错误帧,用于自动检测波特率;SJA1000以不同的波特率接收CAN帧,当收到CAN帧时,表明当前波特率与总线波特率相同。
波特率设置
CAN总线无时钟,使用异步串行传输;波特率是1秒发送的数据位;

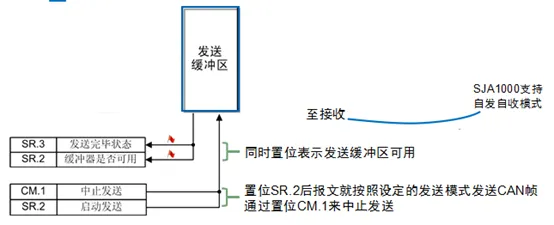
CAN帧发送:
发送CAN帧的步骤:
1.检测状态寄存器,等待发送缓冲区可用;
2.填充报文到发送缓冲区;
3.启动发送。
SJA1000具有一个12字节的缓冲区,要发送的报文可以通过寄存器16-28写入,也可通过寄存器96-108写入或读出:
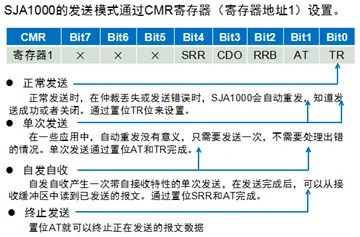
设置发送模式:
char SetSJASendCmd(unsigned char cmd)
{
unsigned char ret;
switch (cmd)
{
default:
case 0:
ret = SetBitMask(REG_CAN_CMR, TR_BIT); //正常发送
break;
case 1:
ret = SetBitMask(REG_CAN_CMR, TR_BIT|AT_BIT); //单次发送
break;
case 2:
ret = SetBitMask(REG_CAN_CMR, TR_BIT|SRR_BIT);//自收自发
break;
case 0xff:
ret = SetBitMask(REG_CAN_CMR, AT_BIT);//终止发送
break;
}
return ret;
}
|
发送函数:
unsigned char SJA_CAN_Filter[8] =
{
// 定义验收滤波器的参数,接收所有帧
0x00, 0x00, 0x00, 0x00,
// ACR0~ACR3
0xff, 0xff, 0xff, 0xff
// AMR0~AMR3
};
unsigned char STD_SEND_BUFFER[11] =
{
// CAN 发送报文缓冲区
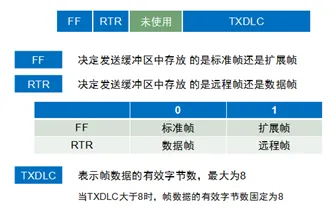
0x08, // 帧信息,标准数据帧,数据长度 = 8
0xEA, 0x60, // 帧ID = 0x753
0x55, 0x55, 0x55, 0x55, 0xaa, 0xaa, 0xaa, 0xaa // 帧数据
};
void main(void) // 主函数,程序入口
{
timerInit();// 初始化
D1 = 0;
SJA1000_RST = 1; // 硬件复位SJA1000
timerDelay(50); // 延时500ms
SJA1000_RST = 0;
SJA1000_Init(0x00, 0x14, SJA_CAN_Filter); // 初始化SJA1000,设置波特率为1Mbps
// 无限循环,main()函数不允许返回
for(;;)
{
SJASendData(STD_SEND_BUFFER, 0x0);
timerDelay(100); // 延时1000ms
}
}
|
为什么帧ID是0x753,这与CAN帧在缓冲区的存储格式有关。

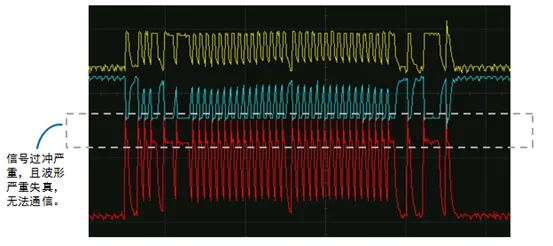
终端电阻非常重要,当波特率较高而且没加终端电阻时,信号过冲非常严重。
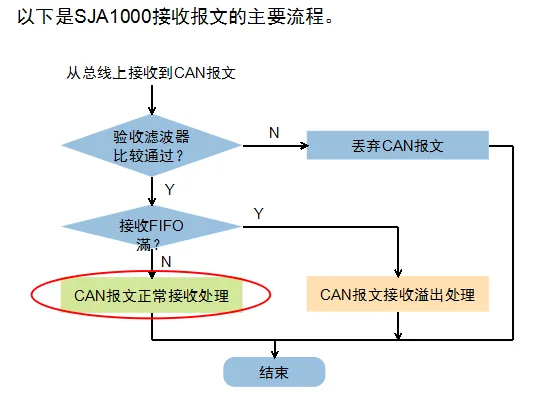
SJA1000有64个字节的接收缓冲区(FIFO),这可以降低对MCU的要求。
MCU可以通过查询或中断的方式确定SJA1000接收到报文后读取报文。
|








