| 编辑推荐: |
|
本文主要介绍了域控制器硬件架构相关内容。
希望对你的学习有帮助。
本文来自于微信公众号焉知汽车,由火龙果软件Linda编辑,推荐。 |
|
2018年,基于德尔福提供的域控制器技术,奥地利TTTech开发了zFAS控制器,率先应用在奥迪A8当中。
从此之后,随着自动驾驶技术的发展,域控制器逐渐成为自动驾驶领域关注的焦点。
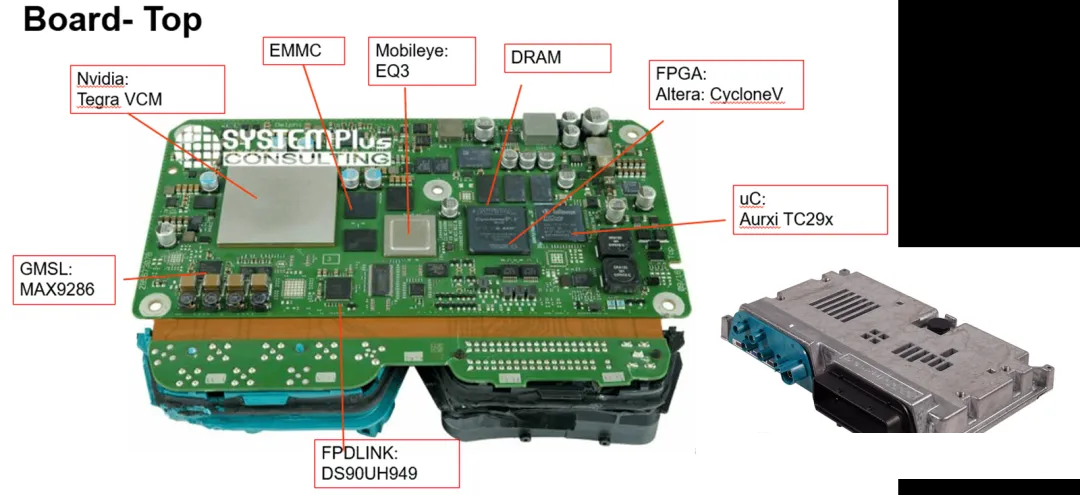
图片来源:SYSTEM Plus
说明:本文所讨论的域控制器是指算力大于5TOPS,通过外接摄像头、毫米波雷达、激光雷达等传感器,可以同时实现行车和泊车自动驾驶功能。(不含前视一体机)
01
基本架构
域控制器虽然比较复杂,但是其硬件最核心的主要是3个部分:计算、存储和通信。其基本架构如下所示:

图片参考:《高级别自动驾驶域控制器硬件通用设计规范(2023版)》,图片后处理:雪岭飞花
域控制器的主要性能和BOM成本,也基本上由计算、存储和通信这三部分决定。
细化一些的硬件架构示意图,如下所示:
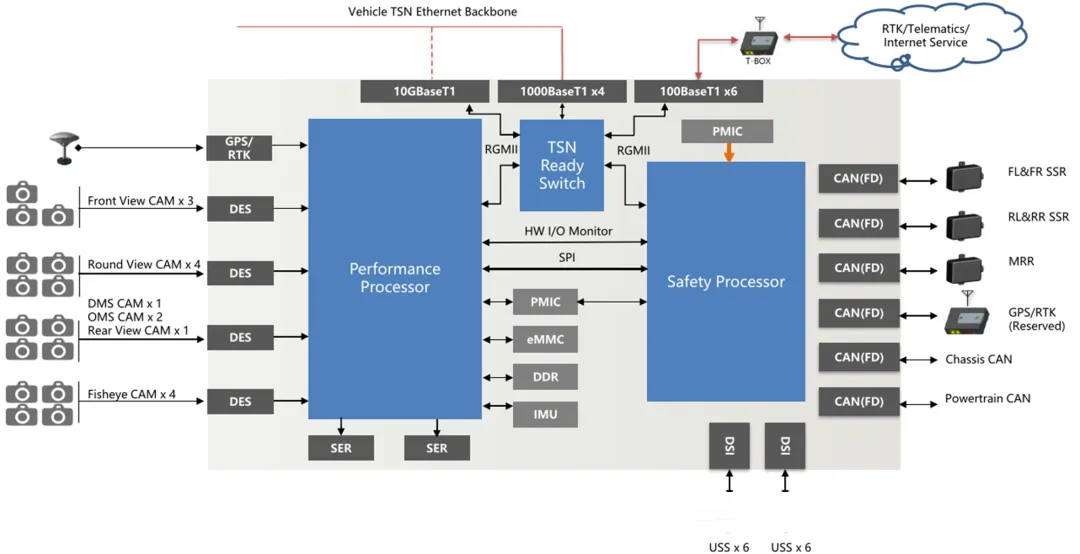
图片来源:畅行智驾
1. 主要硬件模块
1)计算模块
域控制器经常被称为自动驾驶的“大脑”,“大脑”主要的职责就是计算,因此计算模块当然是域控制器中的最核心的部分,同时也是整个硬件中最贵的部分。
计算模块通常包含下面几种类型的计算单元:
AI处理器:运行深度学习算法,进行大模型的推理计算,实现环境感知和规划算法。这类处理器每家叫法略有不同,例如NPU、TPU、BPU等;
GPU或者FPGA:图像的色彩变换、图形矫正等处理;
DSP或者专用加速单元:专用的算法快速运算;
CPU:逻辑运算和决策控制,主要是高精度浮点数串行计算;
MCU:功能安全相关监控和诊断、车辆控制,具备较高的功能安全等级;
其中,前4个部分通常会被集成到1片SoC(System on Chip)中,使得资源利用更高,综合成本更低,有部分SoC甚至还集成了MCU。
根据不同的计算需求,一个域控制器中可能有多个SoC或者MCU,如下所示:
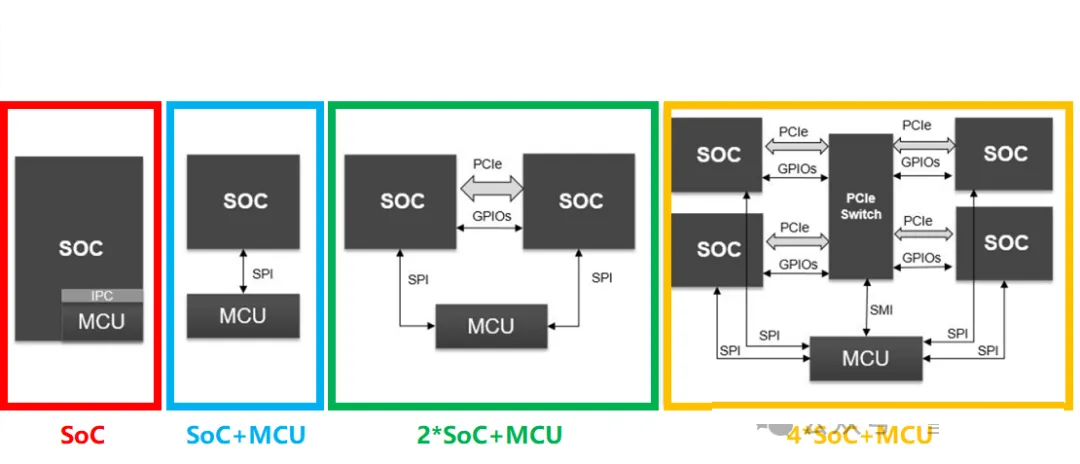
图片参考:《高级别自动驾驶域控制器硬件通用设计规范(2023版)》,图片后处理:雪岭飞花
2)通信模块
通信模块包括:域控制器对外通信,以及控制器内部的片间通信。
其中,对外通信的接口和通信对象,主要包括:
LVDS:摄像头、屏幕等;
Ethernet:激光雷达、区域控制器、T-Box等;
CAN:毫米波雷达、超声波雷达控制器、EPS、ESP、VCU等;
LIN:超声波雷达采用LIN总线就够了;
FlexRay:部分特定控制器;
RS232:导航定位等;
A2B:麦克风、音响、部分传感器等;
控制器内部的片间通信主要包括:SPI、I2C、PCIe、NVLink等。
3)存储模块
存储部分主要包括RAM、eMMC、Nor Flash、UFS等。
4)其他
除了上述三个核心模块之外,域控制器硬件还包括电源PMIC、信息安全芯片、阻容感被动器件、散热组件、外壳、接插件、PCB板等。
2. 域控制器的分类
根据所能实现功能的不同,域控制器的硬件构成差别巨大,其硬件成本可能从数千元到数万元不等。
通常根据算力的不同,将域控制器分为三类:
小算力平台:算力为5-30TOPS,也被称为轻量级行泊一体域控制器,可实现基本的L2功能;
中算力平台:算力为30-200TOPS,可实现高速NOA;
大算力平台:算力在200TOPS以上,可实现城市NOA;
02
小算力平台
1. 主要特点
主要芯片:单TDA4VM、J3/A1000L+MCU、SD5223等;
算力:5-30TOPS;
支持传感器:5~6Camera,3~5Radar;
实现功能:基本L2行泊一体,例如TJA、HWA、APA等;
2. 主要方案
1)单TDA4VM
参考架构如下:
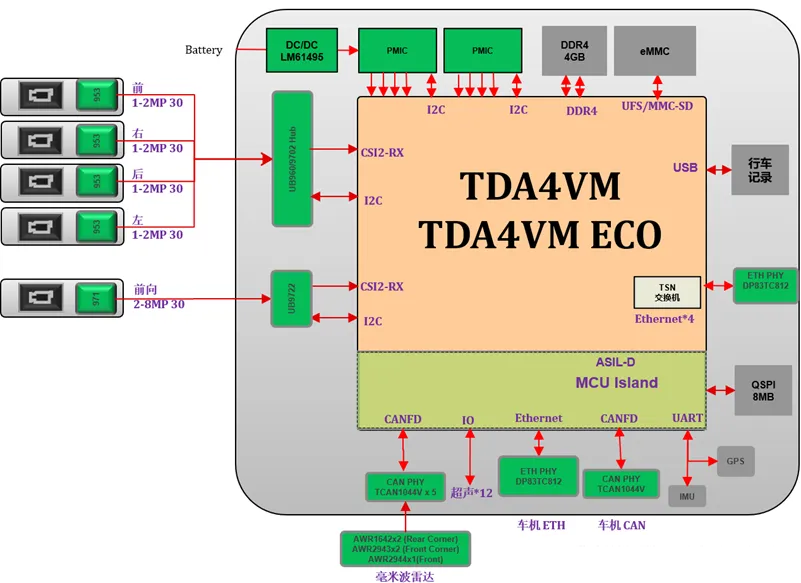
在国内10~20万价格区间具备行泊一体功能的车辆中,采用TDA4方案的车型占到了40%~50%。
采用该方案的厂家众多,包括福瑞泰克,德赛西威、智驾科技、知行科技、易航智能、东软睿驰、佑驾创新、大疆、百度、纽迈科技等等。
2)J3+MCU
J3内部没有锁步核,因此为了满足功能安全的要求,如果采用J3的话,一般需要外挂一个MCU。
参考架构如下:
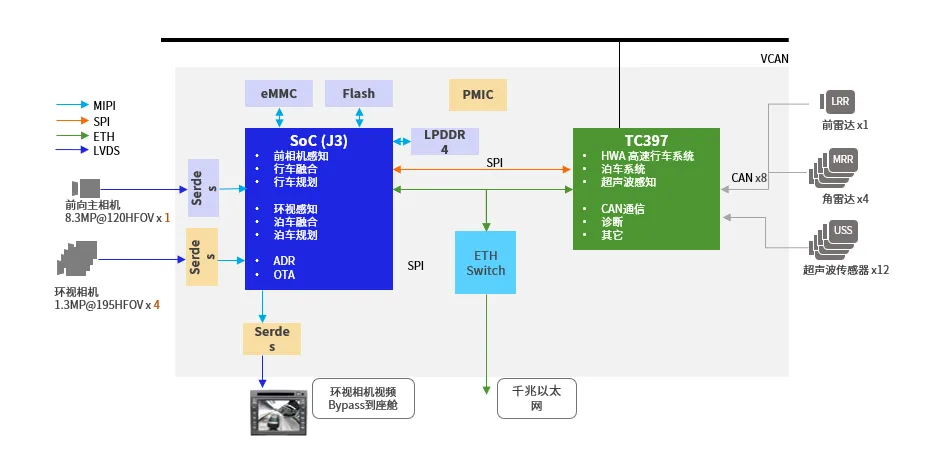
图片来源:映驰科技
采用该方案的有佑驾创新(iPilot 2)、映驰科技、纵目科技(Amphiman3000)、四维图新(单J3+RH850)、禾多科技(HoloARK1.0
单J3版)等等。
3)单A1000L
宏景智驾的IDDC产品采用了A1000L方案。
4)行歌SD5223
寒武纪行歌SD5223是面向L2+自动驾驶市场的产品,最大算力超过16 TOPS,单颗SOC可以实现行泊一体的功能,实现自动驾驶系统向5-10万元的入门级车型覆盖。
03
中算力平台
1. 主要特点
主要芯片:方案比较多,例如TDA4VH、J3+TDA4VM+MCU、2*TDA4VM、2*J3+MCU、3*J3+MCU、2*J3+TDA4VM+MCU、Xavier+MCU、J5+MCU、A1000+MCU、Orin-N+MCU等等;
算力:30-200TOPS;
支持传感器:10~11Camera,3~5Radar;
实现功能:高级L2行泊一体,可以实现高速NOA,记忆行车,记忆泊车等;
2. 主要方案
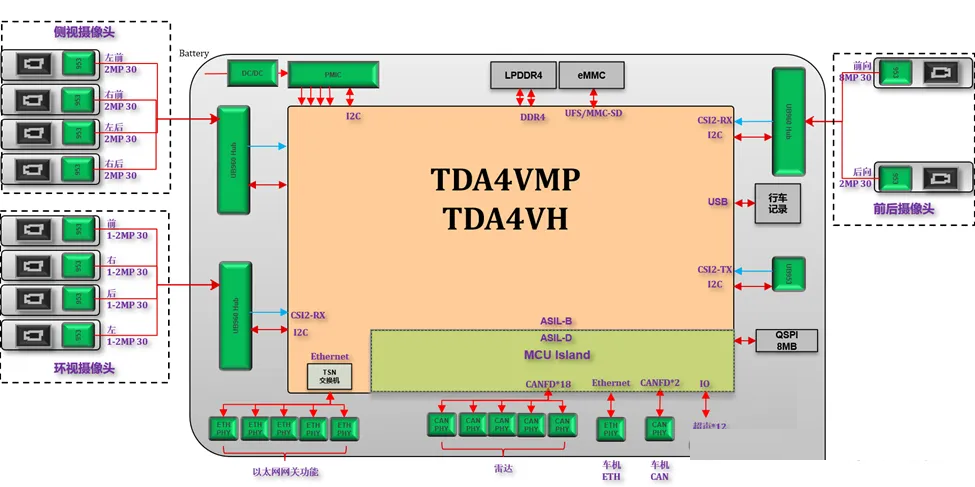
1)单TDA4VH或TDA4VM Plus
算力为24~32TOPS,参考架构如下:
2)J3+TDA4VM+MCU
福瑞泰克ADC20参考架构如下:

图片来源:福瑞泰克
3)2*TDA4VM
TI官方的双TDA4架构方案:
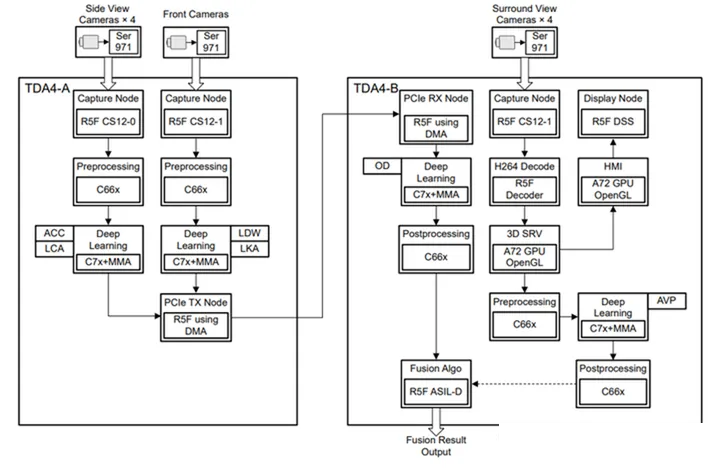
图片来源:TI
使用该方案的有:百度ANP2.0、大疆(D80)、智驾科技、易航智能(雷诺江铃-羿 、上汽大通等量产使用)。
4)2*J3+MCU
宏景智驾为2021款理想One提供的域控采用该方案。
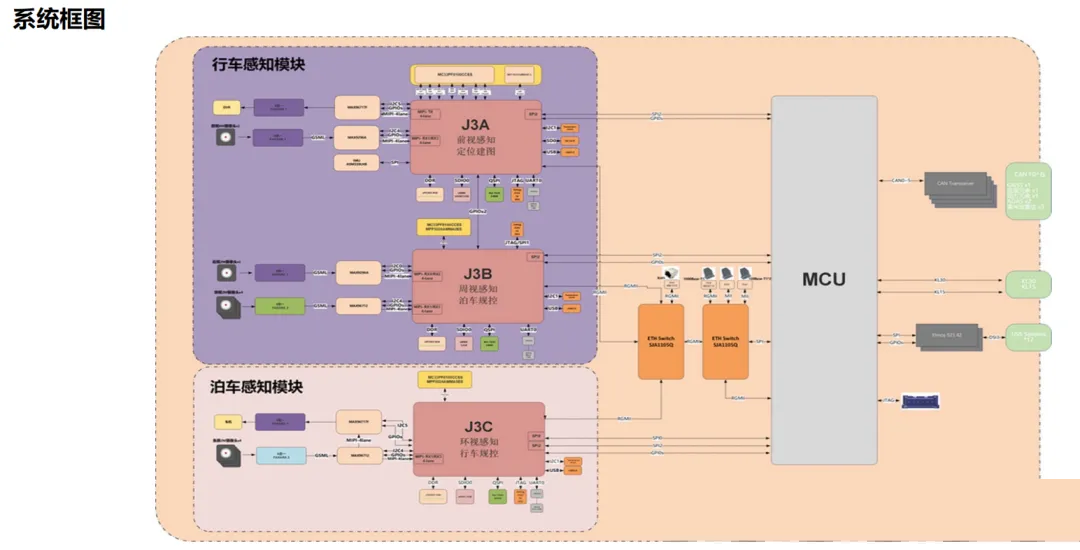
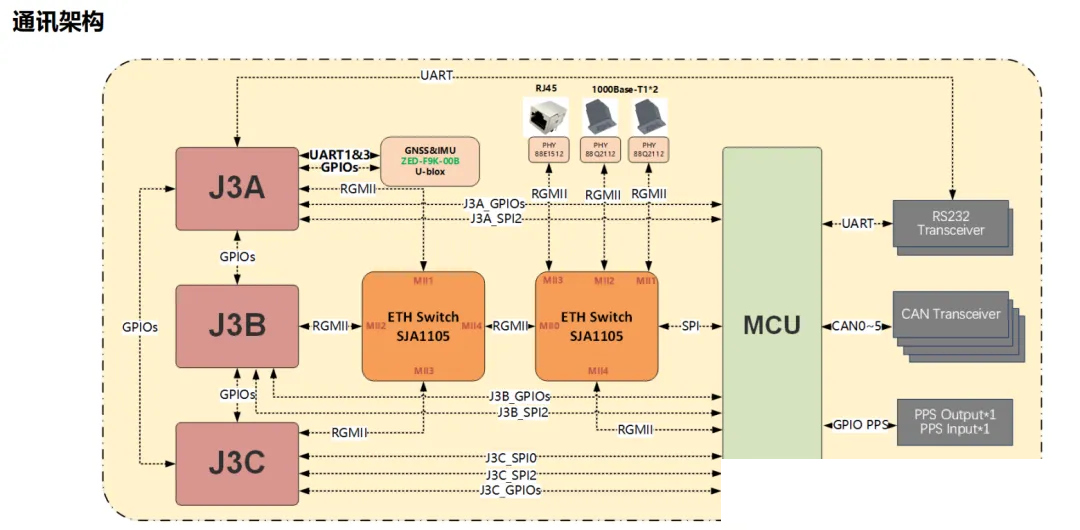
5)3*J3+MCU
地平线官方提供的参考设计如下:


6)2*J3+TDA4+MCU
禾多科技HoloArk 1.0的高配版采用该方案(2*J3+TDA4+TC397)。

图片来源:畅行智驾
8)Xavier + MCU
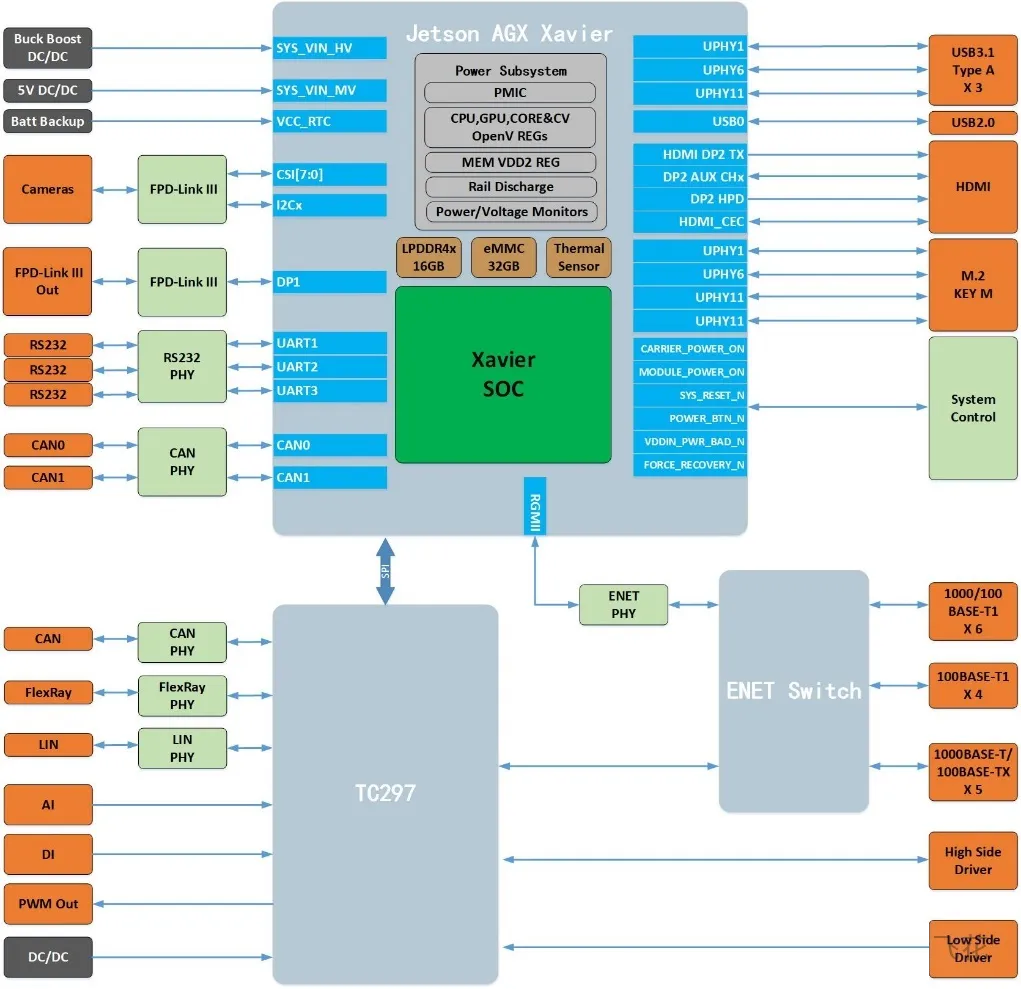
德赛西威IPU3.0采用该方案。
9)J5 + MCU
地平线官方有参考设计支持,J5一般搭配使用S32G、TDA4等。
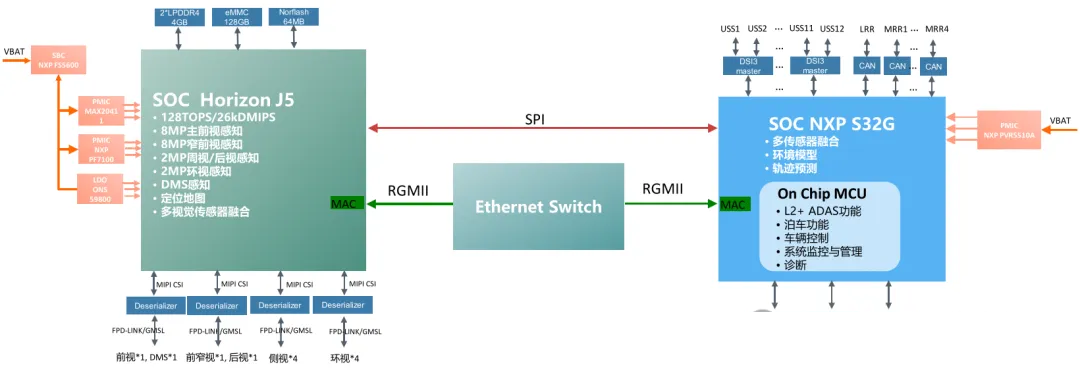
使用该方案的厂商有:禾多(HoloArk 2.0)、大陆、纵目科技(Ampheman 8000)、映驰、东软睿驰、佑驾创新等。
10)A1000+MCU
使用该方案的有吉咖智能、德赛西威(ICP Aurora)、清智科技等。
黑芝麻官宣在红旗EQM和江淮思皓品牌中量产该方案。
11)Orin-N+MCU
Orin-N为Orin-X的低配版本。
04
大算力平台
1. 主要特点
主要芯片:多个A1000/A1000Pro/A2000、J5以及Orin-X,配合MCU;
算力:>200TOPS;
支持传感器:10~13Camera,1~5Radar,以及1~3Lidar;
实现功能:L2~L3行泊一体,可以实现城市NOA,AVP等;
2. 主要方案
1)2*A1000 + MCU
黑芝麻提供的双A1000参考设计:
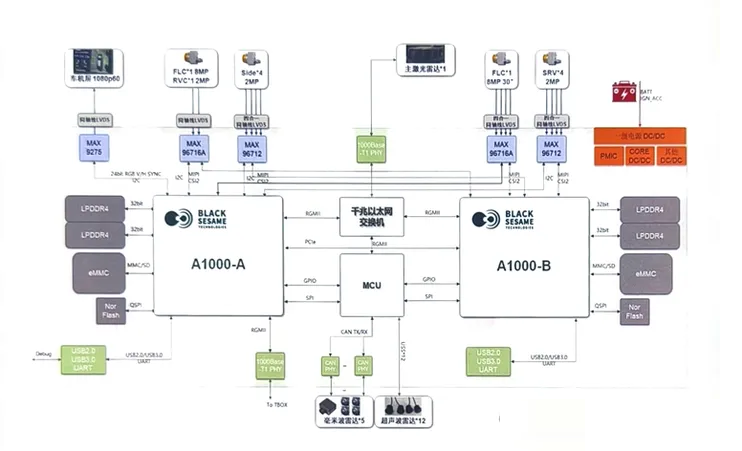
江汽集团、吉利等车企部分行泊一体车型使用该方案。
2)2*J5+MCU
有部分厂家的参考设计如下:
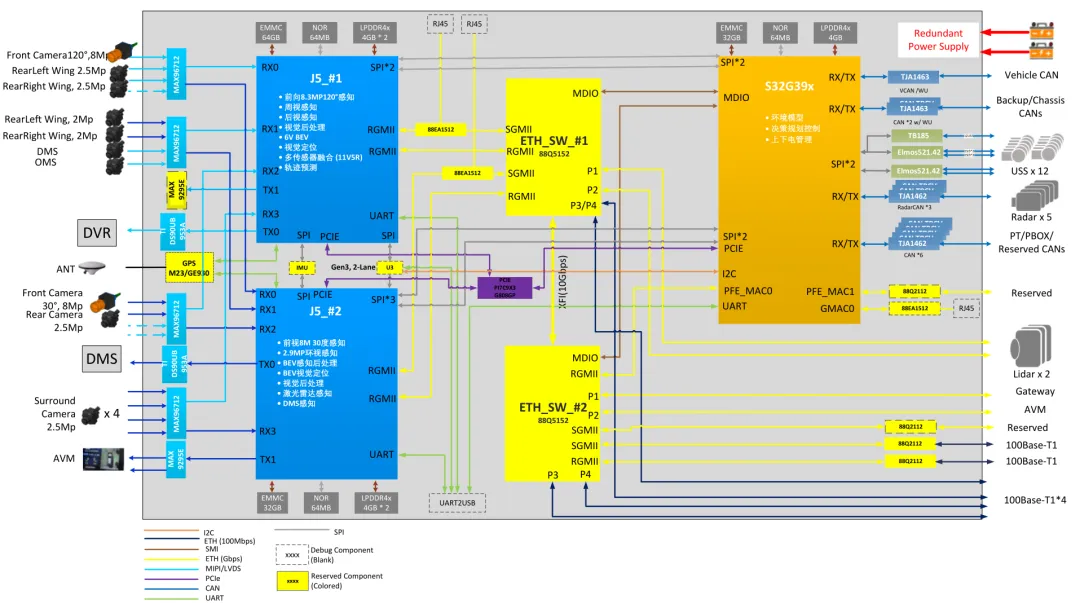
采用该方案的厂家有:采埃孚、东软睿驰、佑驾创新、易航智能等。
理想L8和比亚迪部分车型上使用该方案。
3)Orin-X + MCU
参考架构如下:
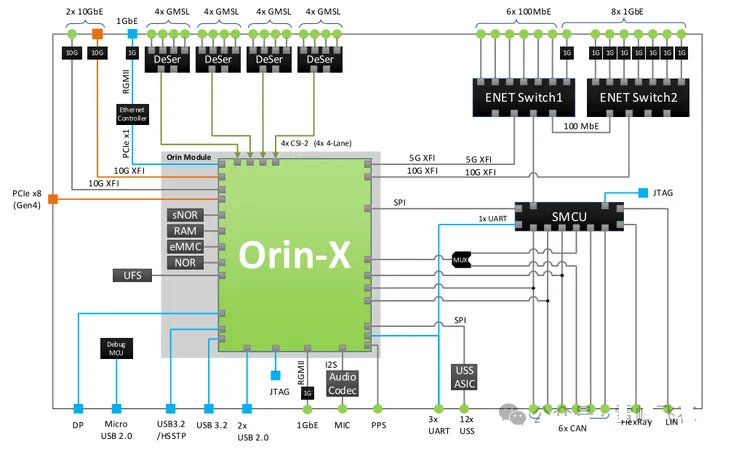
图片来源:英伟达
创时iECU采用该设计方案,在智己汽车上量产。
4)2*Orin-X + MCU
德赛西威IPU04采用该方案,在理想L9上量产。
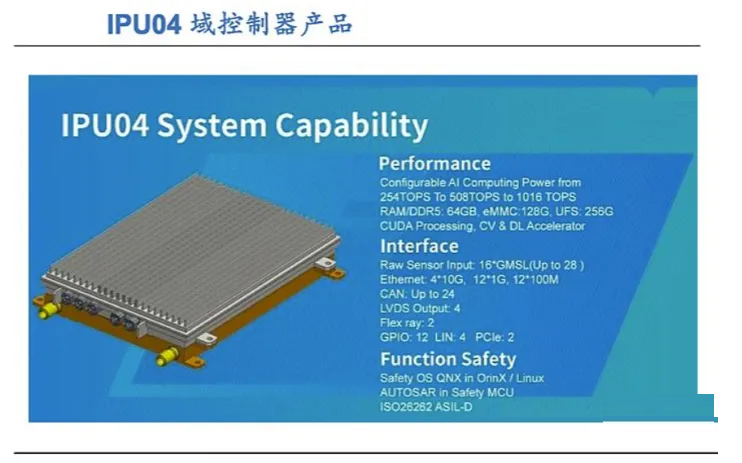
图片来源:德赛西威
博世新一代高阶域控也采用了双Orin方案。
5)4*Orin-X+MCU
蔚来“Adam”计算平台采用4颗Orin。

图片来源:蔚来
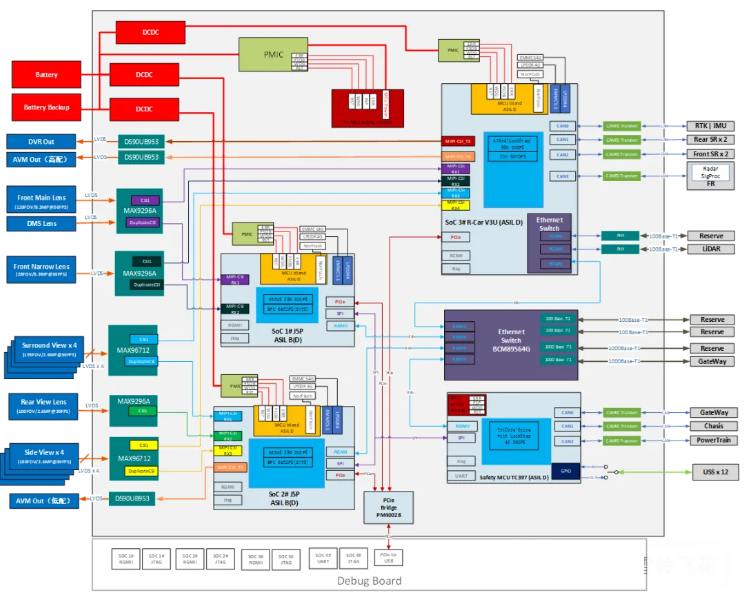
6)2*J5+V3U+TC397
该方案的参考架构如下:
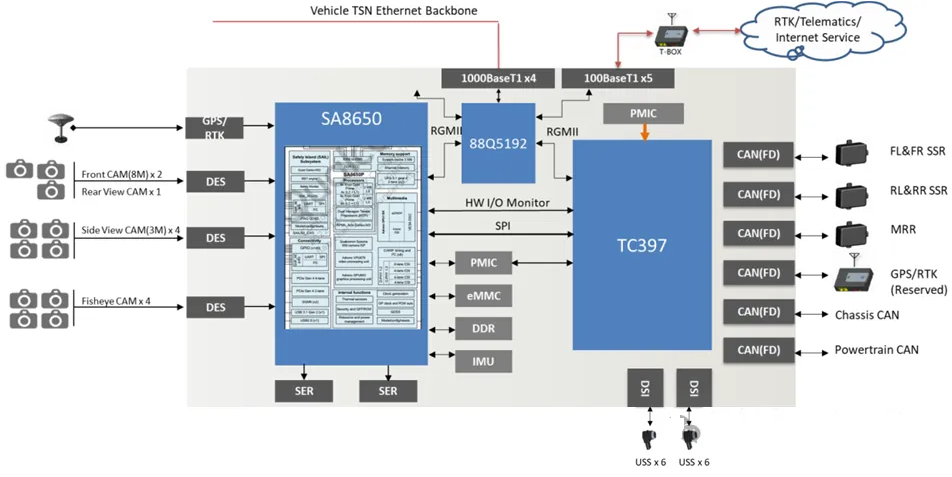
7)2*SA8650+S32G274
该方案的参考架构如下:
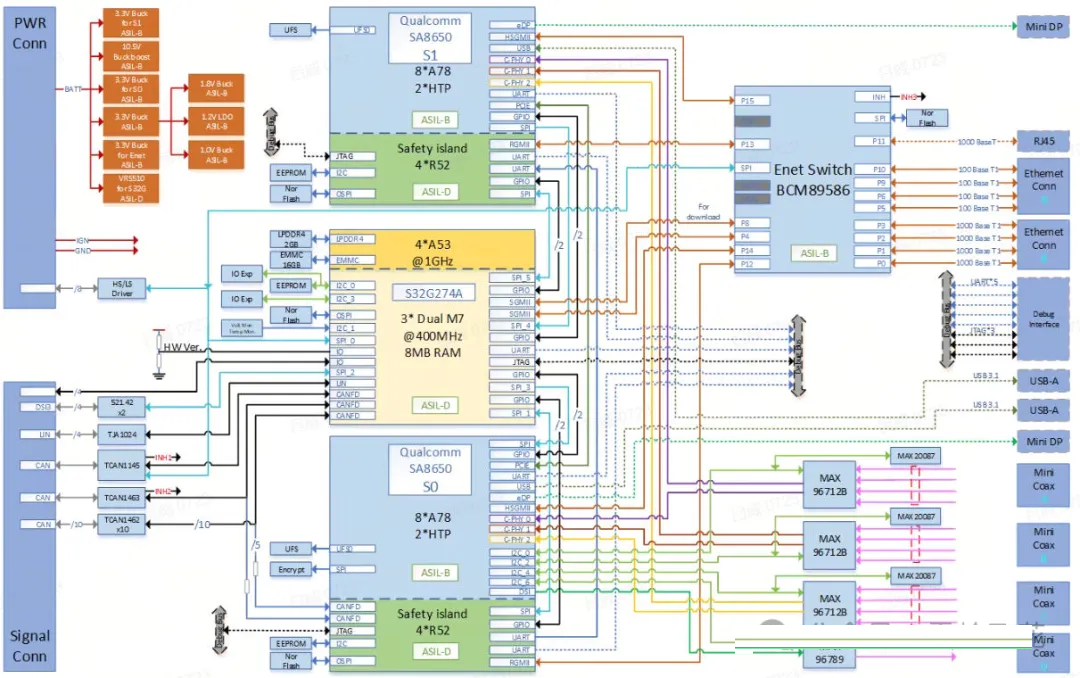
更换8620+TC377可构成中算力平台
该方案的参考架构如下:

05
舱驾融合平台
除了上述三种不同算力的自动驾驶域控制器之外,最近业内也在讨论舱驾融合,因此,出现了许多舱驾融合域控制器方案,本小节做一下简要介绍。
1. 主要特点
舱驾一体,是指在一个高性能计算单元内,实现座舱域与智驾域的融合,可同时支持智舱和智驾功能。
舱驾一体的主要优势在于:
降低成本:物料方面,相比于多SoC方案,单芯片集成度更高、使用物料更少,且共用一套散热系统带来散热成本下降;
降低通讯延时,优化功能体验:使舱和驾之间数据传输从板间通讯变为片内通讯并共享内存;
优化算力利用率:当前芯片还未做到完全的算力动态分配,但未来会从静态配置的算力迭代至动态分布的算力;
应用层面创新空间更大:舱驾融合后,有助于工程师在整体维度进行功能开发,相互调度各自服务或资源,从而融合出更有创新性的应用;
舱驾融合域控制器的参考架构如下:

图片来源:畅行智驾
2. 主要方案
业内不少厂家提出了各自的舱驾一体方案,有些方案还在论证阶段,仅供大家参考。
1)J5+8295+TC397

2)Orin-X+8295+TC397

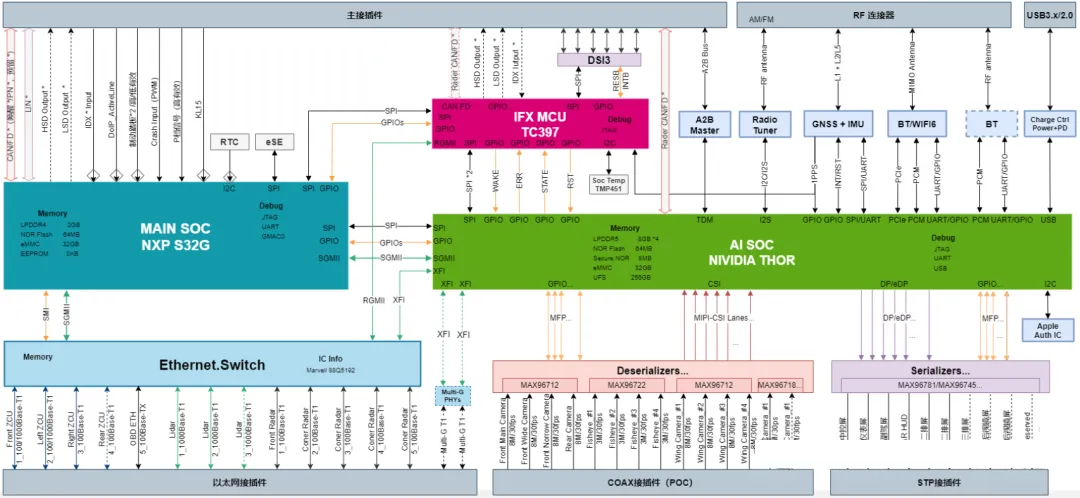
3)Thor+S32G+TC397
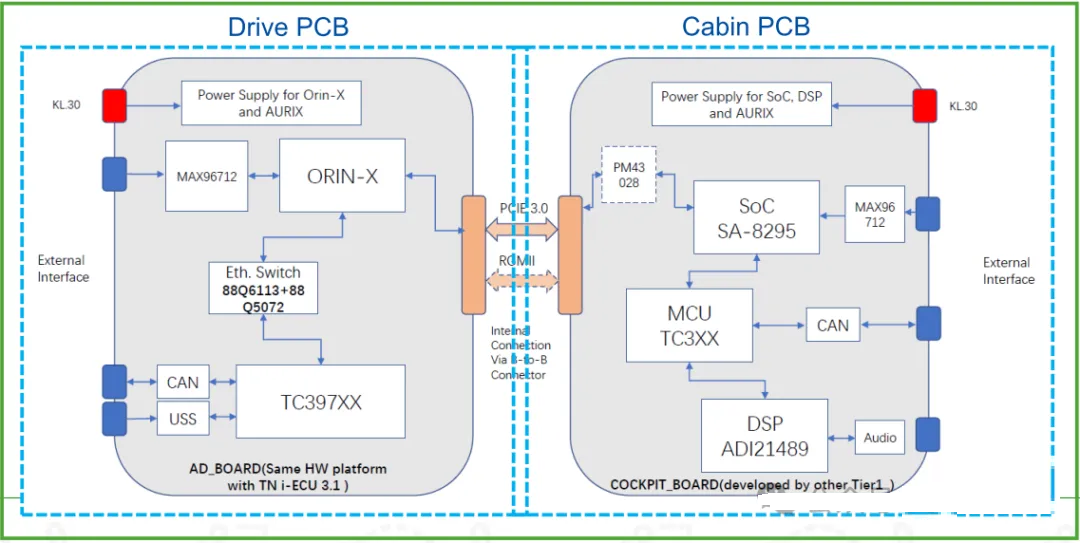
4)Orin-X/J5+8295+S32G
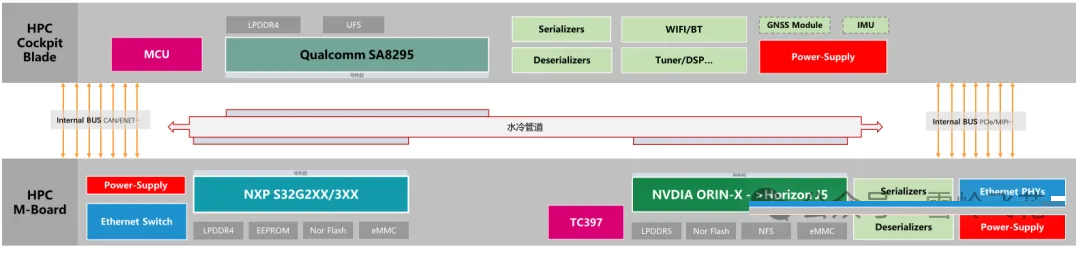
5)Orin-X+8295+2*TC397
6)8775方案
高通的舱驾融合方案,采用8775或者8x9x系列SoC实现。

7)8295+S32G
该方案主要是零跑在使用。
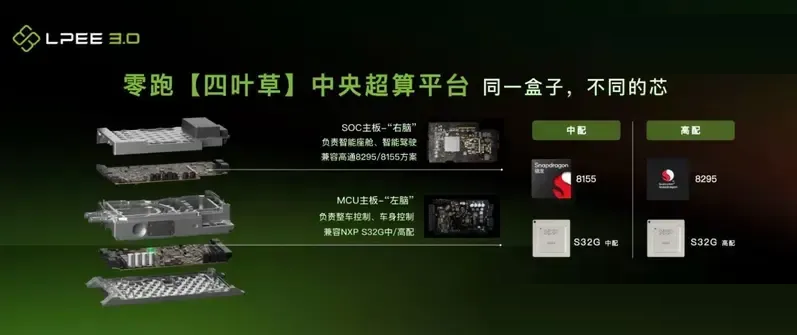
图片来源:零跑汽车
06
结语
自动驾驶域控制器的硬件架构方案多种多样,具体如何选择,需要依据自动驾驶功能需求和成本空间,以及自身研发团队和合作伙伴的擅长领域,做灵活的选择。
|






 订阅
订阅