| 编辑推荐: |
|
本文主要介绍了域控制器硬件架构相关内容。
希望对你的学习有帮助。
本文来自于微信公众号码虫,由火龙果软件Linda编辑,推荐。 |
|
为了便于学习ISO14229UDS诊断协议,提供两个资源链接:
a)ISO14229-Part1,2,3,4,5,6,7UDS最新标准文件获取路径
b)ISO14229Roadvehicles—Unifieddiagnosticservices(UDS)标准各Part部分修订和发布状态汇总
诊断的概念来源于医学,医生通过询问、观察病人,或者通过仪器检测,利用数据对病症做出判断。
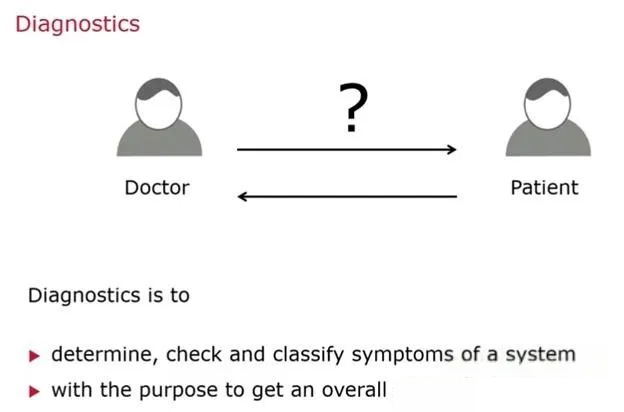
而车辆诊断的目的也有类似的地方,为了能够快速准确的判断车辆或者某个控制器的故障以及故障原因,从而为维修提供可靠的依据。
内容大致分为三个部分,首先介绍诊断的基本概念,再为大家讲解UDS诊断协议,以及协议中常用到的诊断服务,最后对今天的内容做一个小结。
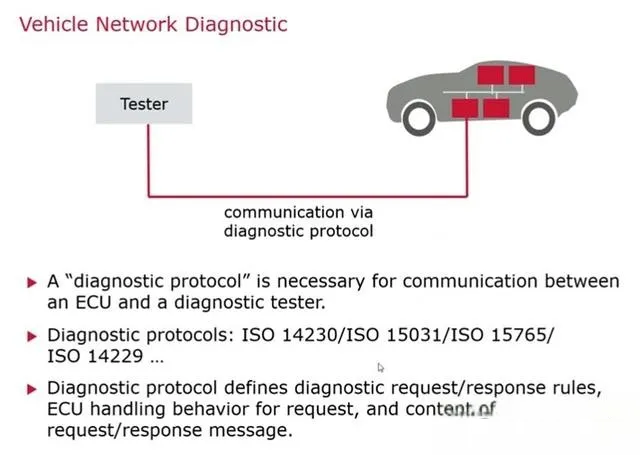
车辆的诊断需要有Tester端和ECU端,Tester端和ECU端通过一问一答的形式进行通信,因而Tester端和ECU端都需要遵循同样的诊断通信协议,常用的诊断协议有ISO14230,ISO15031,ISO15765,还有我们熟悉的ISO14229就是UDS协议,在协议里面定义了诊断的请求,诊断响应的报文格式,以及ECU怎样处理诊断请求报文,以及诊断服务的应用。
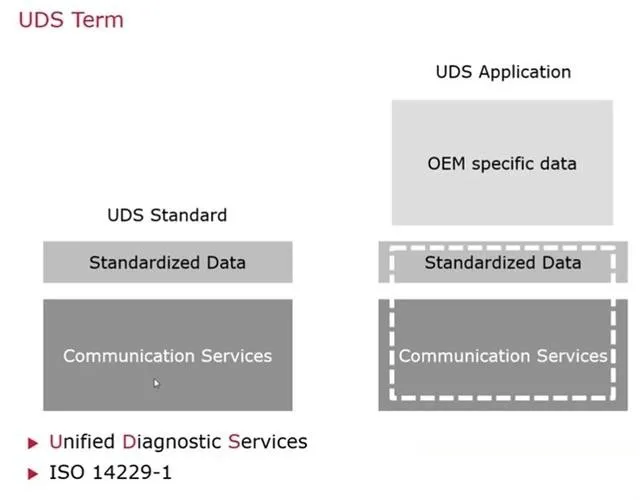
UDS是UnifiedDiagnosticServices的缩写,在国际标准ISO14229-1中定义,UDS标准中除了定义服务的用法,以及服务的格式以外,还定义了一些标准化的数据,而到OEM要使用UDS协议时,除了要使用标准定义的服务以及标准数据以外,还要依据自身的情况,定义属于OEM的特定数据,比如说,定义所要遵循的服务,需要支持的DID,需要支持的DTC等这些内容,这样形成的符合某OEM的诊断规范才能用于ECU诊断功能的开发以及验证。
随着车辆ECU的增多,车辆网络拓扑结构也越来越负责,比如说一辆车需要有多种总线(CAN总线,LIN,以太网,FlexRay),
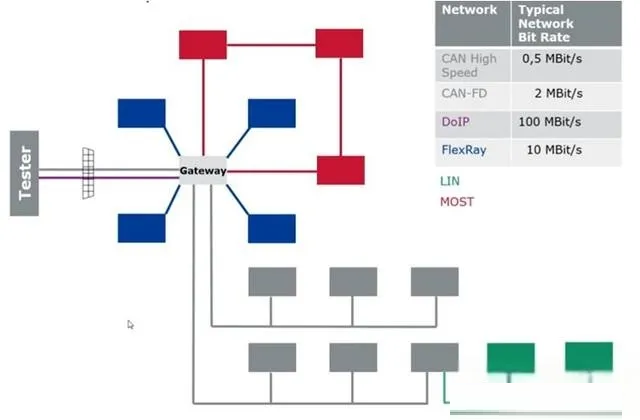
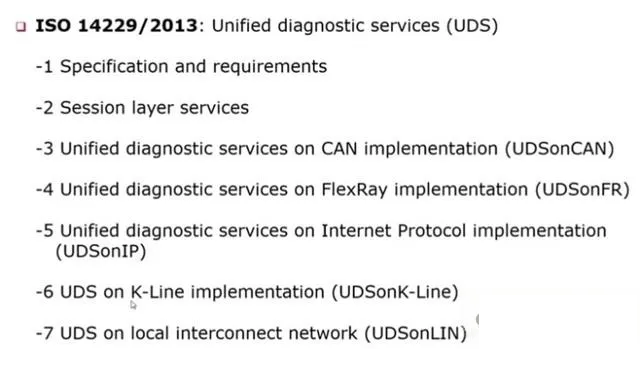
所以在2013年释放的UDS协议中,除了对通用诊断服务的定义以外,还增加了关于UDS在各个总线中应用的定义
这张图就描述了UDS在OSI七层模型中的应用,OSI七层模型,第一层第二层分别定义了物理层和数据链路层,第三层第四层定义了网络层和传输层,第七层是应用层。
比如说我们熟悉CAN总线,物理层和数据链路层遵循的是ISO11898,而它的传输层遵循的是ISO15765-2,在ISO14229-3中定义了UDS基于CAN总线的应用,而现在比较火的以太网,它的物理层和数据链路层遵循的是ISO13400-3,它的传输层也就是DoIP遵循的是ISO13400-2,它的UDS基于以太网的应用是ISO14229-5

下面我们来看下,关于诊断服务的一些知识,
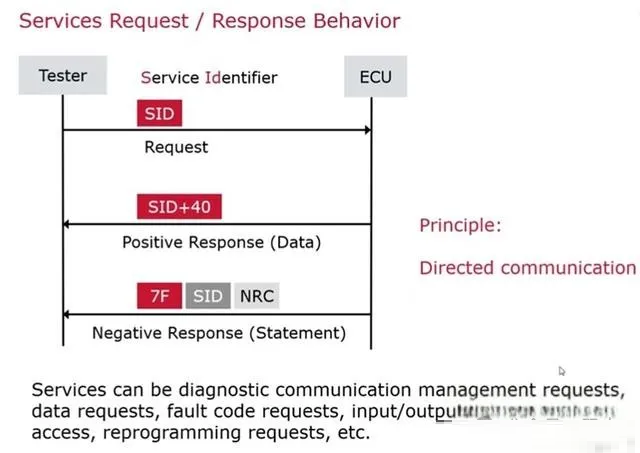
首先来看服务请求和响应格式,“请求”由Tester端发送给ECU,请求报文里带有SID,根据具体的服务内容后面加具体的数据。肯定响应格式由“SID+40+具体的数据”。否定响应格式是一个固定的格式“7F+请求报文里的SID+一个字节的NRC”
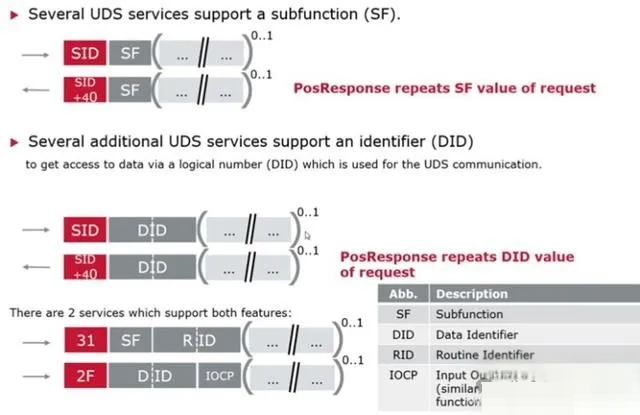
看两个名词,一个叫做Subfunction,一个叫做ID,UDS服务支持Subfunction的请求和响应格式,“请求”为“SID+一个字节Subfunction+具体的数据”,肯定响应为“SID+40+Subfunction+具体的数据”,而有的UDS服务里面是不支持Subfunction,是支持DID的,DID是“数据ID”的意思,那么它的请求格式为“SID+具体的DID+数据内容”,肯定响应“SID+40+DID+具体的数据”,这里举出两个例子,一个是“31例程控制服务”,还有一个是“2FIO控制服务”,31就是它的请求报文里面,带一个字节的Subfunction和两个字节的RoutineID,后面的这个数据是跟具体的数据内容,也可以没有具体的数据。2F是它的SID+两个字节的DID+一个字节的输入输出控制参数(这里注意这一个字节的数据类似于Subfunction,但是他不是Subfunction)+后面加具体的数据内容。
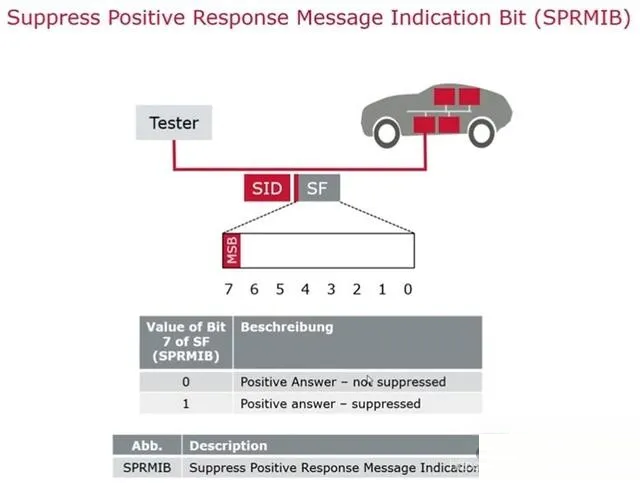
下面为大家介绍一个概念,为肯定响应抑制位。肯定响应抑制位是在Subfunction里的这个字节的最高位,我们把它叫做肯定响应抑制位。只有这个服务支持Subfunction的时候,才有可能支持肯定响应抑制位,当肯定响应抑制位置1的时候,要求所有的肯定响应的抑制将不再发送。当肯定响应抑制位为0的时候,肯定响应是不被抑制的。这里要注意的是它只是抑制肯定响应,而否定响应是不被抑制的。
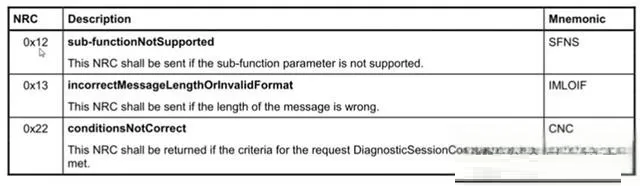
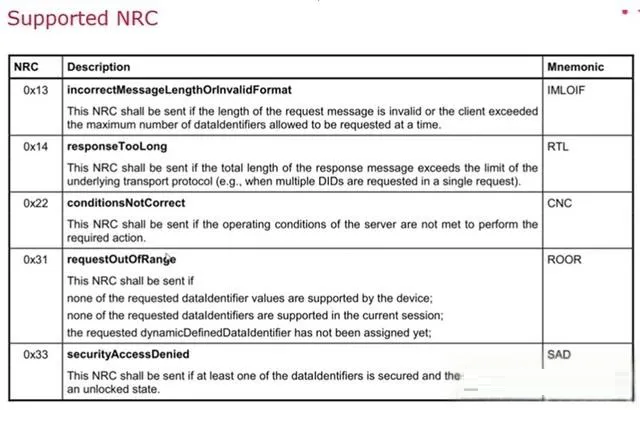
Tester发送的请求报文格式错误,或者请求发送的条件处于错误,ECU将发送否定响应,否定响应的格式是“7F+SID+NRC”,常用到的NRC在这里罗列了。
11表示服务不支持;
12subfunction不支持;
13请求的长度不正确,或者格式不正确
31是请求超出范围;
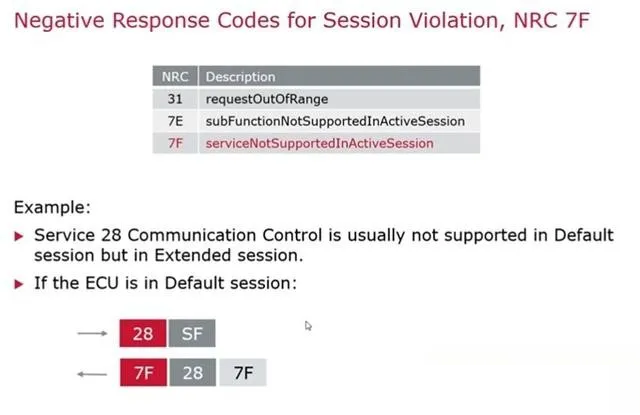
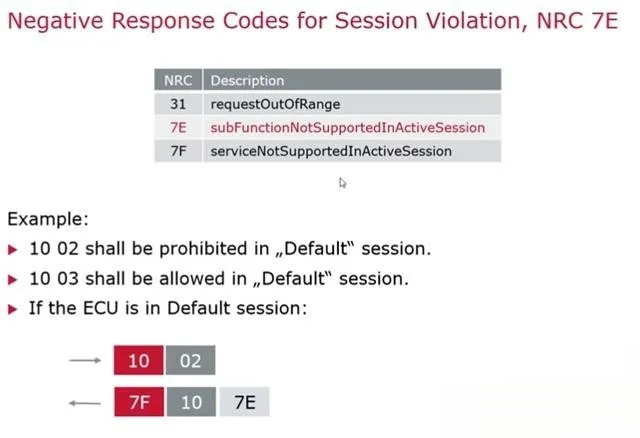
7E是在当前会话下subfunction不支持
7F是在当前会话下服务不支持

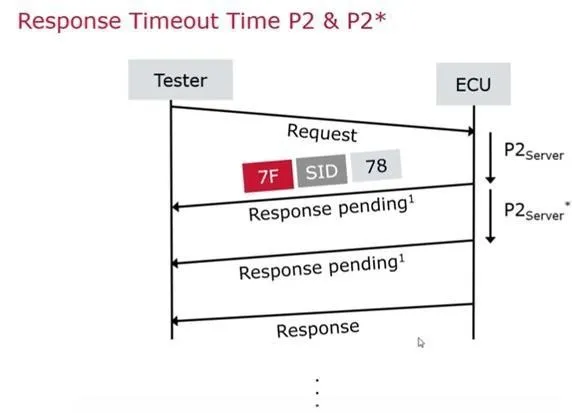
来看两个时间参数,一个是叫做P2Sever,一个是叫做P2Sever*。当Tester给ECU发送请求过后,ECU需要在P2Sever时间内给出相应的响应,如果ECU当前正在处理别的任务,处理别的事情,而不能在P2Sever的时间内给出相应的响应,那么它先在P2Sever时间内给出一个NRC为78的Pending报文,告诉Tester“ECU正在忙”,之后会在P2Sever*的时间内给出其它的响应报文,如果P2Sever*的时间内还是不能给出相应的肯定响应和否定响应,将继续给出Pending报文,直到能够正确处理请求报文之后,会给出正确的响应报文。
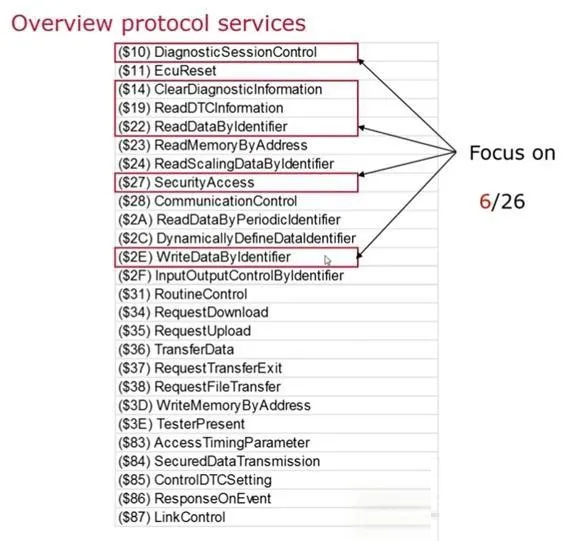
今天会着重介绍26个UDS服务里的6个,分别是10诊断会话控制,14清除诊断信息,19读取诊断信息,22由DID读取数据,27安全解锁服务,2E由DID写入数据。
下面我们来看诊断会话控制就是10服务
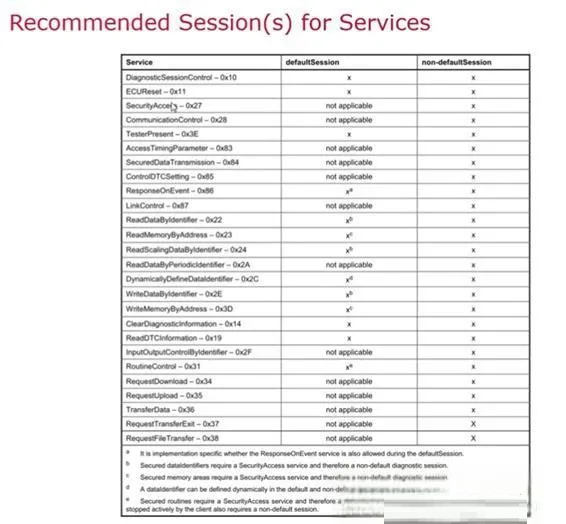
ECU会有不同的会话控制,所以ECU在不同的阶段,比如说开发,生产,售后阶段也会用到不同的会话模式,因为每个服务功能的不同,也会在诊断规范里定义这些服务所支持的诊断会话模式
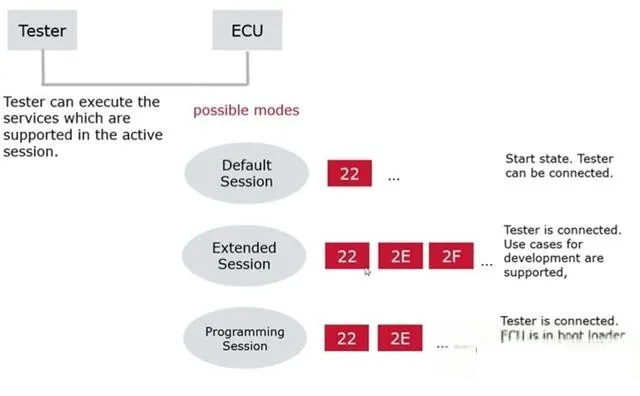
这张表是14229里面,对各个诊断服务,对会话控制的支持情况,比如说通信控制28服务,要求在默认会话下不支持;27安全解锁服务,在默认会话模式下不支持;和刷写相关的34,36,37服务,在默认会话下也是不支持的。
我们来看更会话控制有关的3个NRC,首先来看NRC7F:NRC7F是指在当前会话下服务不支持。28通信控制服务,要求在默认会话下是不支持的,在扩展会话下能支持。而当ECU处于默认会话的时候,我们上位机发送了28这个服务,ECU收到之后,会回复7FNRC的否定响应。
NRC7E和NRC7F不同的是:NRC7E是在当前会话下Subfunction不支持。一个用的比较多的用法是,编程会话是不能够由默认会话跳转到编程会话的,只能由扩展会话跳转到编程会话。但ECU处于默认会话的时候,执行了1002编程会话的请求,ECU会回复7ENRC的否定响应。
再来看NRC31,NRC31常用的用法是请求超出范围,比如说22服务,发送的DID,是ECU不支持的,比如说发送的请求220101,因为ECU不支持0101这个DID,会发送NRC31的否定响应,还有一个用法是:22在3个会话(默认,编程,扩展下都是支持的),22后面所跟的DID来读取数据的DID对各个会话等级是有要求的,比如说读取硬件版本号在编程会话模式下是支持的,读取车速在编程会话下是不支持的,当ECU处于编程会话的时候,来通过C001来读取车速,那么ECU会回复NRC31的否定响应。

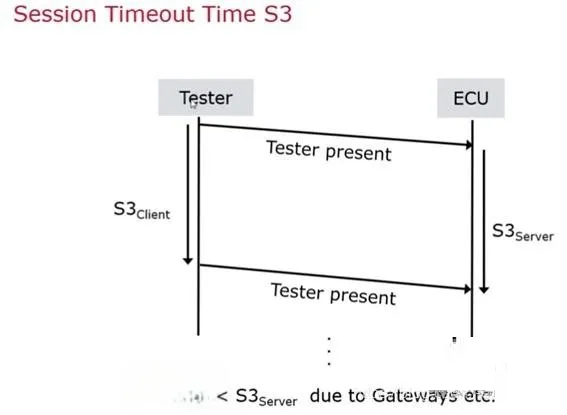
这个是会话状态的一个状态机,状态机之间可以互相跳转,状态机自身也能跳转,我们把除了默认会话之外的会话状态,都叫做非默认会话状态。当ECU一上电的时候是处于默认会话的,我们通过10,比如说1003,1002来将会话状态由默认会话跳转到非默认会话。由非默认会话执行1001跳转至默认会话。当ECU处于非默认会话的时候,S3time这个时间超时,ECU也会从非默认会话跳转到默认会话。为了防止ECU从非默认会话跳转至默认会话,我们要求Tester端周期发送3E服务Testerpresent,让ECU一直维持在非默认会话。那么S3time这个时间怎么用呢?我们来看下面这张图
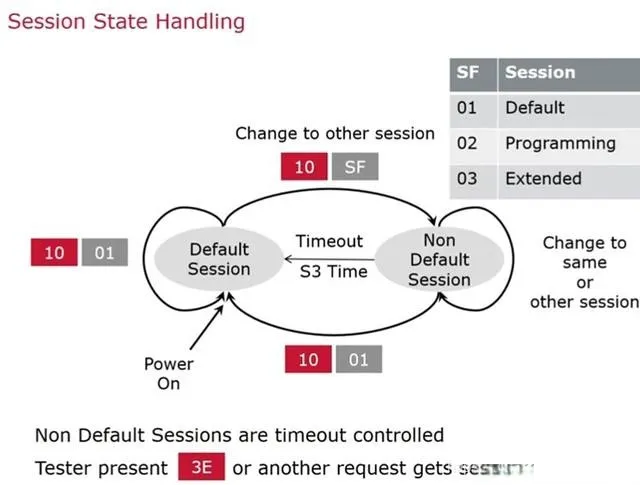
Tester端会利用S3Client周期发送Testerpresent给ECU,ECU收到Testerpresent比如说3E00,3E80的服务请求,会让ECU维持在非默认会话,如果Tester端S3server这个时间内,比如说5000毫秒时间内,都没有给ECU发送任何诊断请求报文,那么ECU就会从非默认会话跳转到默认会话;如果ECU处于解锁状态,也会从解锁状态跳转到锁定状态。通常S3cleint时间小于S3server的时间,比如说网关延时的一些情况。
这个是10服务的请求和响应格式。SID+一个字节的Subfunction(常用的有01默认会话,02编程会话,03扩展会话),它的肯定响应格式是50(就是10+40)+一个字节的Subfunction(就是诊断会话类型)+4个字节的会话参数。
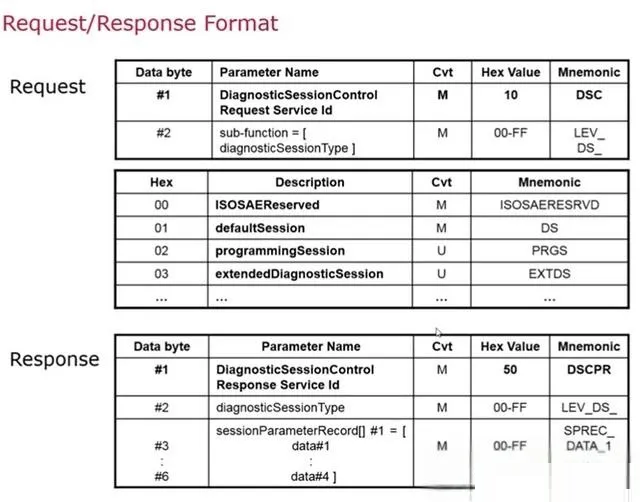
支持的NRC有3个,12subfunction不支持;13请求格式或者长度错误;22条件不支持。
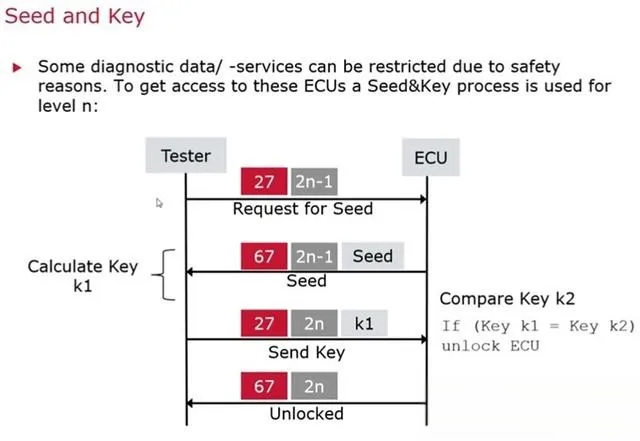
下面我们来看下,安全解锁27服务。
常用到的服务:2E服务通过DID来写入数据;2F通过DID来控制输入输出端口的数值;还有ECU刷写有关的编程服务。这些服务都会改变和影响一些内存里的数据,或者输入输出端口的一些值,所以这些服务是一个被保护的服务。这些服务只有ECU处于解锁状态下才能够执行,而ECU一上电处于锁定状态,那么ECU如何从锁定状态跳转到解锁状态呢?
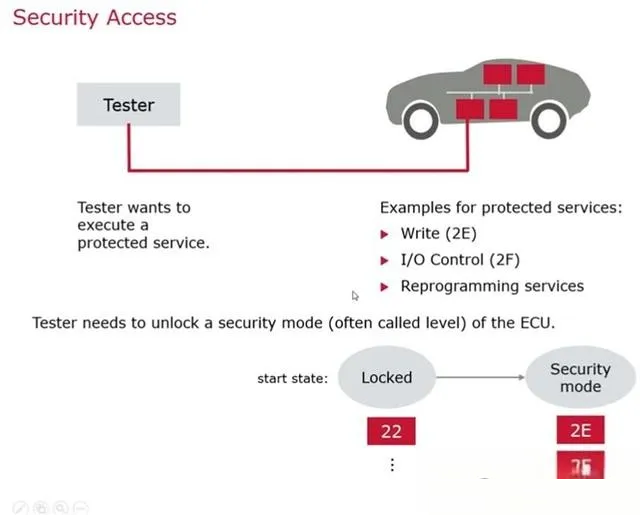
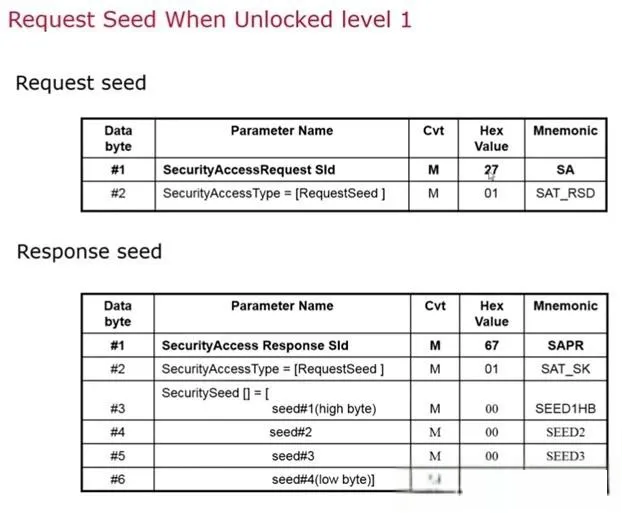
是要求Tester端和ECU端进行27解锁服务之后,ECU才能够处于解锁状态,那么这个解锁的过程是一个固定的:首先由Tester端给ECU发送请求报文来请求种子,ECU收到这个报文后,回复肯定响应,肯定响应里带有种子数;Tester端收到这个种子数,根据自己安全算法算出来一个K1发送给ECU,ECU也有自己对应的安全算法,他由这个Seed算出来一个密钥K2,当ECU收到这个K1后和自身计算的K2进行比较,如果两者是一致的,那么ECU发送肯定响应给Tester端,告诉Tester端ECU已经解锁。
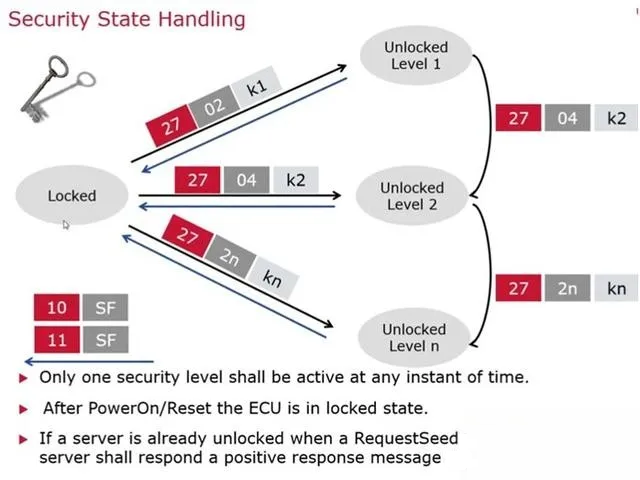
我们刚才也提到了ECU一上电处于锁定状态,只有执行了安全解锁的流程后才能跳转到解锁状态,一个ECU可以同时拥有多个安全等级,多个安全等级之间可以是相互独立的,也可以是有依赖关系的,比如说要求先解锁安全等级1才能解锁安全等级2,那么当ECU处于解锁状态的时候,会有几种情况会使ECU由解锁状态跳转至锁定状态,比如说执行了11复位服务,比如说有了重新上下电,还比如说有了执行10会话切换,也会让ECU由解锁状态跳转到锁定状态。
当ECU处于解锁状态的时候Tester端再去请求种子的时候,回复的种子全为0。
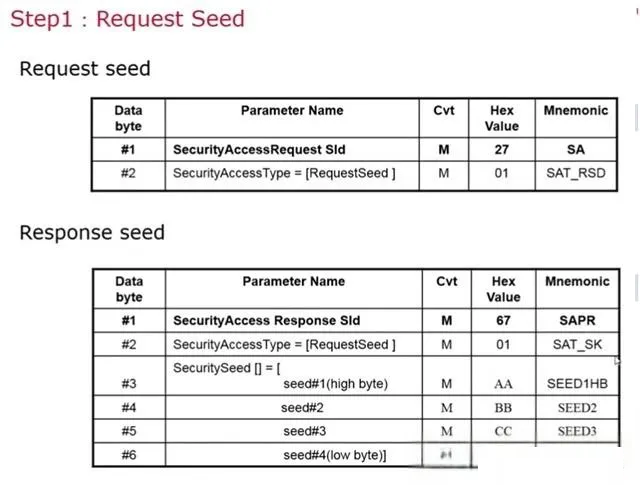
这个是请求种子的请求报文和肯定响应报文。请求报文为“27+01”;肯定响应“67+01+四个字节的种子”。
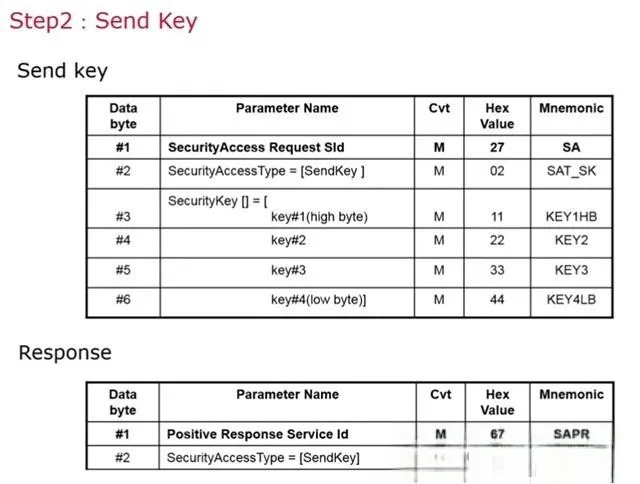
当Tester端计算得到了一个密钥,它会发送“27+02+4个字节的密钥”给ECU。当ECU将两者密钥比较后,它认为比较的结果是一致的,ECU会给Tester端发送“67+02”,认为ECU已经处于解锁状态。
那么当ECU已经处于解锁状态的时候,Tester端又一次请求了种子,发送了请求种子的请求报文给ECU,那么ECU就会回复“种子数全为0的肯定响应”报文给Tester端。表明ECU现在处于解锁状态。
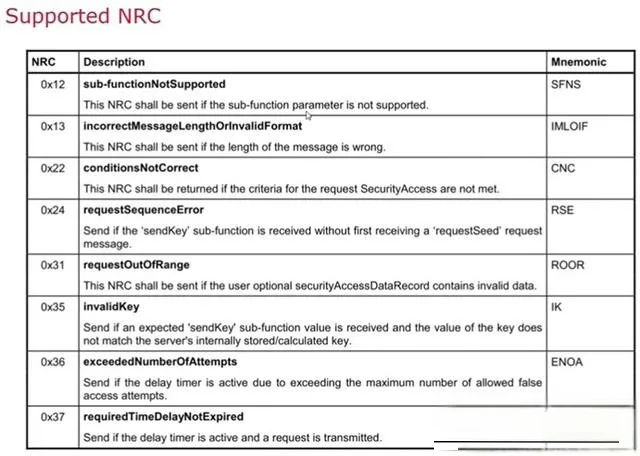
这个是27服务支持的所有NRC是在14229-1里定义,比如说我们常用的12;13;这里注意24是一个请求顺序错误,比如说我们要求的安全解锁状态过程必须是先请求Seed再发送key,如果你没有执行请求seed的请求报文,直接发送了key,就会回复24NRC;比如说35是非法Key,如果Tester发送了非法的密钥给ECU,ECU就会回复35NRC;36是尝试次数超限,比如说这是要看具体的诊断规范定义,有的定义请求尝试次数不能超过3次,那么Tester端发送给ECU的Key连续3次错误的时候,ECU就会回复36NRC;37指延时还没有到,因为在有的诊断规范里定义请求的尝试次数达到最大值的时候,ECU会锁定一段的时间,在这个时间之内,你的Tester端是不能够再次请求种子的,所以在这个时间之内,比如说有的整车厂用到10秒延时,Tester端再一次发送了请求种子的请求报文给ECU,那么ECU就会回复37NRC的否定响应报文。
下面我们来看通过DID来读取和写入数据,就是22和2E服务
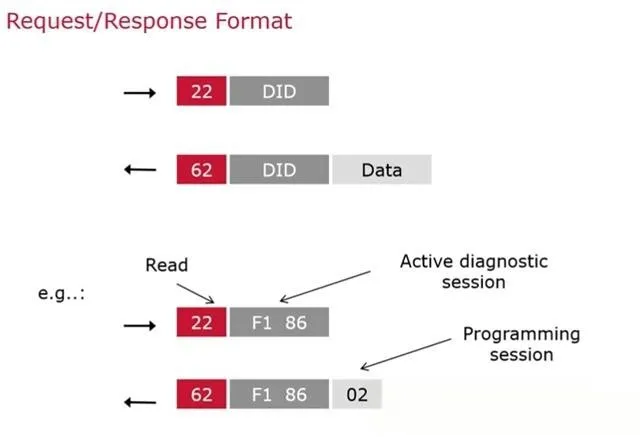
首先来看22服务的请求和响应格式,请求格式“22+两个字节的DID”;它的肯定响应“62+DID+所读取的数据”。这里举出了一个例子,比如说现在的DID是F186来读取当前的诊断会话状态,它的肯定响应格式“62+F186+02”读取当前处于编程会话状态。
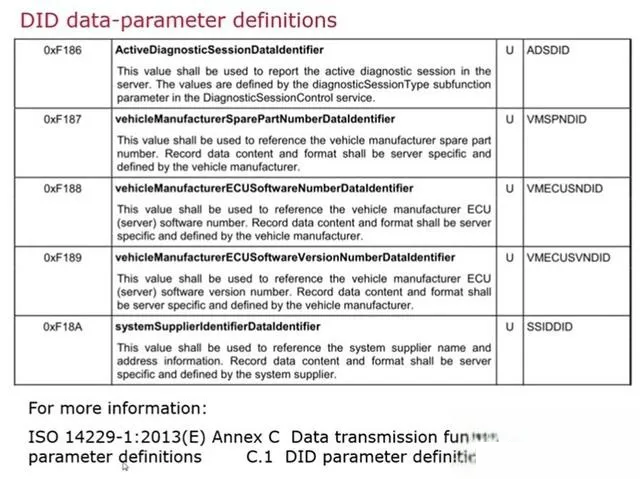
在14229-12013版附录C里面列出一些推荐使用的DID和这些DID的功能,大家也可以去看一下这个附录C
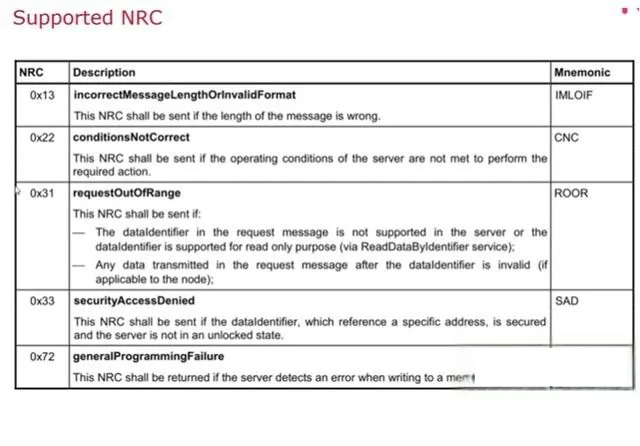
22服务支持的NRC。13是请求格式不正确;14读取的数据已经超过了传输的最大值,就是超限了;31我们刚才也已经提到过了,比如说请求的DID不支持,请求的DID在当前会话下不支持;33要求在解锁状态下,而现在没有处于解锁状态执行了响应的请求。
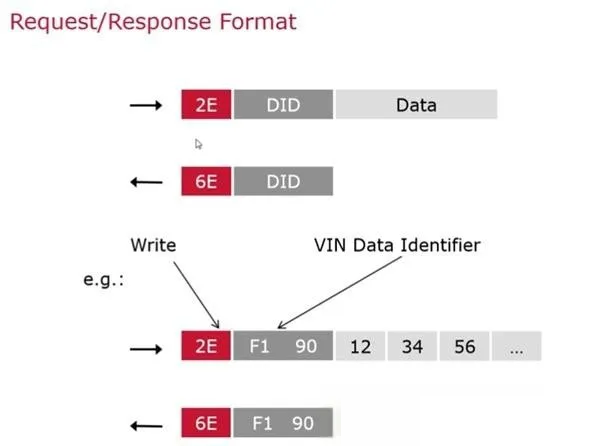
看一下由DID写入数据:2E服务。他的请求格式“2E+2个字节的DID+需要写入的数值”;肯定响应的格式“6E+DID”。这里举出来一个例子,由F190来写入VIN码,写入一个17字节的VIN码,这里简化,就打了省略号。当写入成功后,ECU回复肯定响应“6E+F190”
2E服务支持的NRC。31;3E;33;72和编程有关的,比如说在Bootloader刷写的过程中,需要对Flash进行操作,而写入数据没有写成功的时候,会回复72NRC
下面我们来看和故障存储有关的服务。
什么是故障呢?当系统检测到了一个错误或者是一个故障发生的时候,会将相对应的数值故障码进行存储,那么这个对应的数值故障码,我们称之为故障码,就是DTC。
一个DTC可以反应出一个故障发生的具体位置,和这个故障发生原因和类型,我们通过读取的DTC信息,可以为维修提供一些依据。除此以外还有与法律有关的故障,比如说排放有关的,在未来还会有安全相关的故障

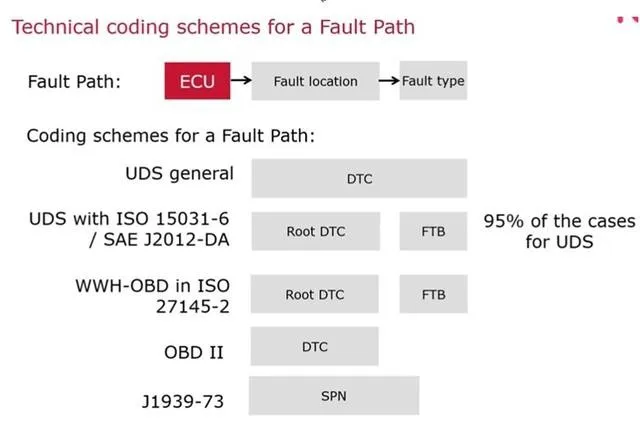
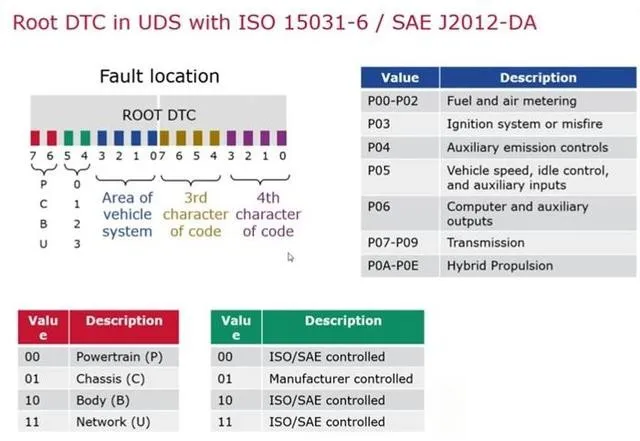
通过这个故障可以反应出在ECU具体的哪一个位置,和产生的故障类型,在很多国际标准里面都定义了DTC的格式。比如说UDS里定义DTC由3个字节组成,而ISO15031-6里定义了DTC格式由“两个字节根基+一个字节的故障类型”组成。那么我们常用的UDS服务里面DTC格式用的是哪一种呢?有95%用到的DTC格式都是ISO15031-6里定义的DTC的故障类型和格式
ISO15031-6定义的DTC格式什么样的呢?
两个字节的根字节来定义DTC,
左边前两位能反应DTC到底是哪一个系统:
00表示Powertrain;
01表示底盘;
10表示车身;
11是网络相关的。
左边第3~4位反应的是,DTC到底是由ISO,SAE,这些标准组织所定义的故障,还是由整车厂来定义命名的故障;
左边第5~8反应的是车辆系统的区域;
右边8位,这个字节具体的编码,就是DTC的编码。
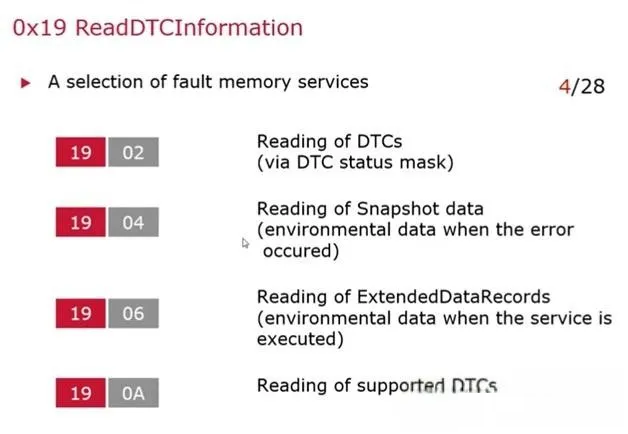
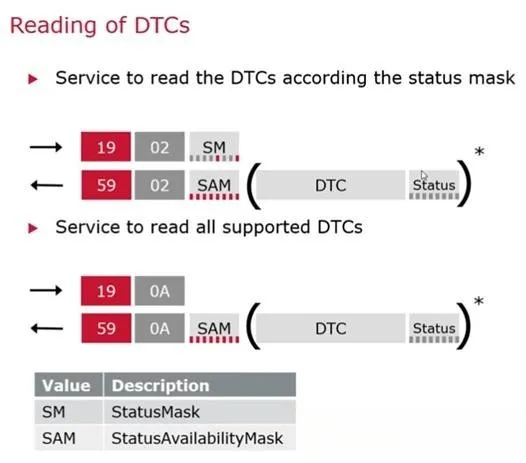
在14229-1中定义的19服务读取DTC信息里,定义28个Subfunction,根据不同的Subfunction来获取不同的诊断信息,在这里我们介绍4个不同的Subfunction,这4个Subfunction也是在规范中常用的,他们分别是02;04;06;0A。
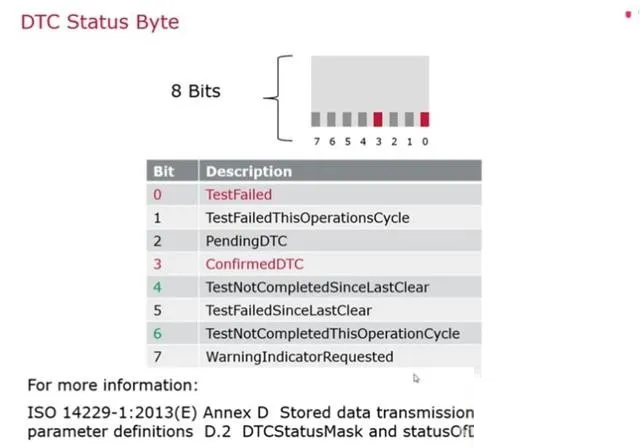
刚才我们提到了DTC状态字节,这个DTC状态由8个位组成的一个字节。这8个位分别代表不同的含义,具体这8个位代表的含义,包括这8个位初始值是什么,它什么时候被置1,什么时候又被清0,它在什么情况下用,怎样用,在14229-12013版附录D有详细的定义。大家如果想具体了解这8个位的定义,可以参看附录D。
这里要提醒大家的是除了Bit4和Bit6以外,其它所有位的初始值都应该为0,而Bit4和Bit6的初始值位1。
常用的有比如说Bit0和Bit3.
Bit0当检测到这个故障,发生错误的时候被置1;
Bit3ConfirmedDTC根据具体DTC的应用逻辑,这个DTC被检测到了多次,这个次数由具体的ECU规范定义,那么这一位也应该被置1。
我们通过1902读取DTC的时候,会用到3个不同类型的DTCStatus,那么这3个不同的DTC有什么区别呢:
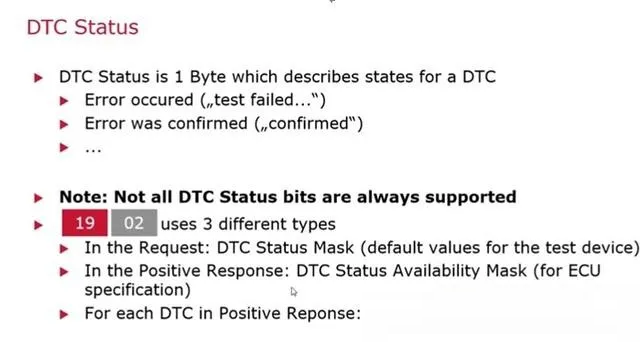
我们来看具体的请求和响应格式,首先看1902。1902后面跟一个字节的StatusMask,第0位和第3位被置1,而这一个字节Mask,是在ECU诊断规范定义的,所以5902+一个字节的Mask+具体的DTC+DTC后面的跟的DTCStatus。
如果有多个DTC,后面会重复DTC的格式:3个字节的DTC+DTCStatus。
通过190A读取ECU支持的所有DTC,请求格式是两个字节“19+0A”;肯定响应格式“59+0A+一个字节的Mask+后面跟ECU支持的所有DTC”
当诊断故障信息被存储了以后,我还需要,问题我们已经通过维修的方式解决了,我们用什么样的方法将这个DTC清除呢?
用到14服务清除诊断信息,14服务格式很简单,请求格式是“14+3个字节数值”,这3个字节的数值可以是针对单个DTC清除,也可以是按组来清除DTC,也可以是清除全部DTC。当3个字节都为FF时,表示将ECU里产生的所有DTC清除。
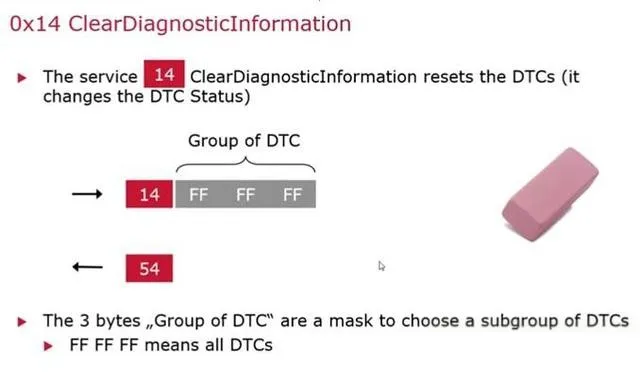
那我能不能按照组来清除DTC,比如说清除和车身有关的DTC,就按照车身这个组的数值,将它添加到请求报文格式里;
那我能不能单独清除,只针对某一个DTC,清除这个DTC,也是可以的。只需将这个DTC的具体数值放在请求报文,那么的肯定响应格式是一个字节54。
这个表格在14229中也有描述,大家可以具体参看。

|






 订阅
订阅