| 编辑推荐: |
|
本文主要介绍了从ECU系统视角理解CAN通讯需求相关内容。
希望对你的学习有帮助。
本文来自于微信公众号ADAS与ECU之吾见,由火龙果软件Linda编辑,推荐。 |
|
在软件定义汽车这个时代,汽车功能越来越丰富,随之ECU越来越多,有些功能靠ECU独立实现,有些功能则需要多个ECU联合实现。总体来说,ECU绝大多数情况下都需要与其他ECU进行信息交互,比如充电功能,车载充电机OBC需要联合电池管理系统BMS和整车控制器VCU等联合才能实现。因此,这些ECU采取怎样的通讯方式来实现信息交互?目前,常用的ECU通讯方式有
CAN,LIN和FlexRay,同时随着汽车电子电器架构朝着中央集成控制方向发展,以太网的应用也越来越广泛。
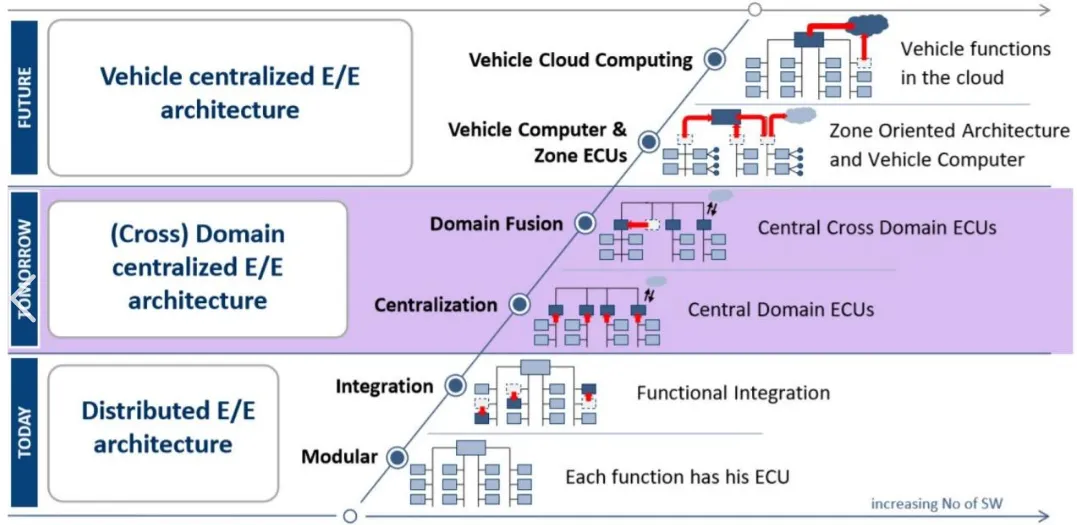
source:the software Car: Building ICT Architectures
for Future Electric Vehicles
当然不管汽车电子电器架构发展多么迅速,CAN通讯仍将无处不在,持续对ECU之间的信息交互扮演着极其关键的角色。因此,本文从ECU系统层级角度来探讨CAN通讯都会有怎样的需求,以及如何去理解与评估这些需求。
#01 CAN通讯需求的分析与分解
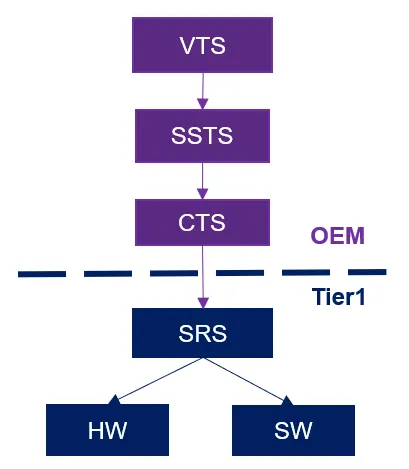
汽车ECU基本都采用V流程开发,先由OEM提供功能开发需求,然后经过ECU系统的分析与评估,再分配给ECU软硬件进行相应的开发与验证,最后由系统进行验证和确认。
本文将侧重点在ECU系统层面视角来看这些CAN通讯需求。通常ECU系统收到在客户关于CAN通讯的需求会涉及以下几个点:
ECU需要具备几路CAN,每路CAN的基本要求是什么;
每条CAN需要具备哪些功能;
CAN通讯矩阵或DBC是怎样的。
这些需求就是ECU CAN通讯开发的起点,一般称为客户需求或者利益相关者需求Stakeholder
requirement。在ECU系统层面,系统工程师收到这些需求后,会拉上相关利益者一起来评估这些需求,包括硬件,软件和功能安全等项目内部成员,同时也会和客户多次对齐,最终明确好这些CAN通讯需求。
接着系统工程师将在ECU系统层面将需求细化为ECU系统需求,比如:
ECU需要两路CAN,CAN1用于ECU之间的信息交互,CAN2用于诊断和标定;
两路CAN都为CAN FD,仲裁段波特率500Kbps,数据段波特率为2Mbps,采样点均为80%,都支持标准帧和扩展帧格式;
CAN1需要根据已提供的CAN通讯矩阵或DBC进行开发;
CAN1需要支持特定帧报文唤醒,支持局部网络唤醒功能等。
当然需求细化分解出来了很重要,但有没有彻底吃透呢?接下来我们就再进一步来探讨。
#02 如何理解CAN通讯需求
就系统工程师的经历来说,当看到这些需求,一方面要理解需求本身,另一方面需要知道这些需求将会涉及的相关利益方。下面我们就逐一解析上面所列举的CAN通讯需求。
2.1 ECU需要两路CAN,CAN1用于ECU之间的信息交互,CAN2用于诊断和标定
为什么ECU通常需要两路CAN或者更多?主要考虑因素有CAN总线的负载率以及功能需求等。所以OEM定义一路用作通讯,比如动力总成域上挂VCU,
MCU, BMS 和OBC等。另一路则用于车辆的标定和诊断通讯功能,其中标定功能在量产会被禁用,这路CAN与OBD接口相连,如下所示:
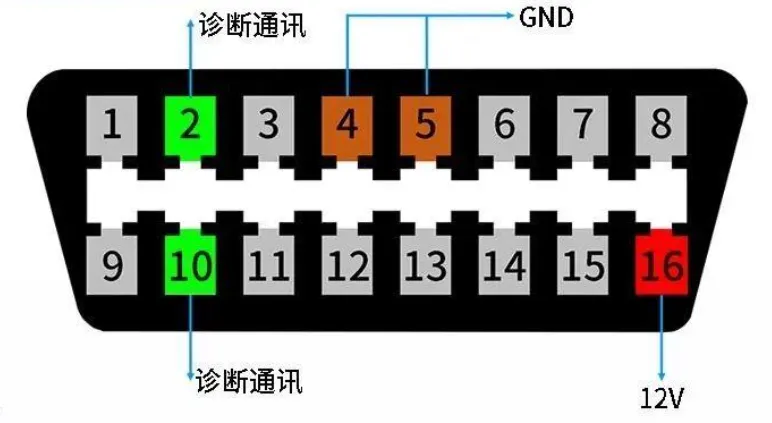
当然也有有些控制器只有1路CAN,既用于通讯也用于诊断标定,比如有些电子泵产品。
对于这条需求,该如何评估,考虑点有:
主要评估当前的控制器硬件是否满足,即从接插件Pin数量是否足够提供两路CAN_H和CAN_L;
PCB是否有足够空间布置两颗CAN收发器及其相应的处理电路;
微控制器芯片中CAN控制器数量是否足够。

因此实现的关键点在于硬件,而对于软件来说,主要涉及工作量。
2.2 两路CAN都为CAN FD,仲裁段波特率500Kbps,数据段波特率为2Mbps,采样点均为80%,都支持标准帧和扩展帧格式;
对于这条需求,考虑因素有两个方面:
一方面是控制器硬件,即CAN收发器和MCU的CAN控制器需要支持CAN FD;
另一方面是控制器软件,CAN通讯功能模块需要支持CAN FD报文的处理。
另外针对CAN数据帧格式,传输速率及采样,主要涉及软件开发的内容,另外可能需要确保测试设备支持CAN
FD的测试验证。
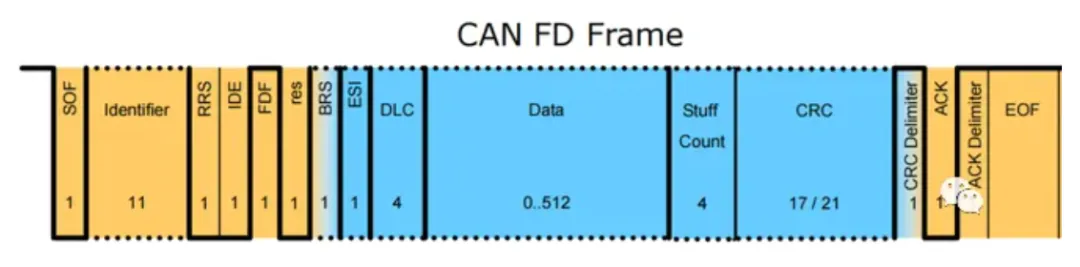
source:CANFD an introduction, from Vector
为了更好地理解这些需求,这里对这些术语稍作解释:
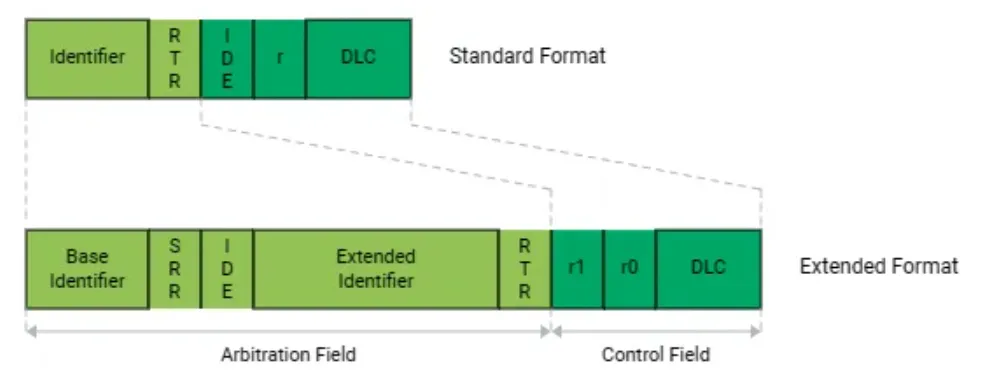
CAN FD的可变速率。CAN FD采用了两种位速率:从控制场中的BRS位到ACK场之前(含CRC分界符)称为数据段速率,如上图蓝色部分,其余部分仲裁段速率。两种速率各有一套位时间定义寄存器,它们除了采用不同的位时间单位TQ外,位时间各段的分配比例也可不同,所以两者可以设置不同的波特率和采样点。500Kbps表示1秒钟可以传输500,000bit的数据,2000Kbps表示1秒钟可以传输2000,000bit的数据。
标准和扩展格式的数据帧。两者的区别在仲裁段,标准格式的仲裁段包含11位基本ID位和RTR位,而扩展格式的仲裁段除了11位基本ID位和RTR位外,还包含SRR位,IDE位和18位扩展ID位。即标准格式可表示的CAN
ID(11位)范围为 0X000~0X7FF,而扩展格式可表示的CAN ID(29位)范围为0X00000000~0X1FFFFFFF。如下所示:
source:CAN_E: Data Frame (vector.com)
2.3 CAN1需要根据已提供的CAN通讯矩阵或DBC进行开发
对于这条需求的理解,可以参考很不错的两篇文章(写的非常清楚):
一文了解CAN矩阵与DBC文件;
CAN矩阵和DBC里有哪些隐藏信息?
主要工作内容在软件,包括CAN驱动的配置,CAN报文的收发,CAN报文信号的提取和转换等。对于CAN通讯矩阵中的信号不再做详细解释,这里了解下报文中包含保护或校验信息,比如校验和(Checksum)和滚动计数器(Rolling
Counter)。
Checksum。它是用来判断CAN报文传输过程是否会出现错误,报文的发送方采用特定的Checksum校验算法计算一条报文的CRC校验码,再将该校验码放到该报文数据中,与报文中的其他信号一起发送到CAN总线。然后报文的接收方会读取到该校验码,同时采用相同的Checksum校验算法计算出CRC校验码,再对比这两个校验码,如果一致,则说明报文传输过程没有出现错误,否则认为报文传输过程有误,这条报文有问题。
Rolling counter。它是用来判断报文传输过程是否出现丢帧,报文的发送方发送一条报文就计数器加1,从0累加到15,然后不断循环。如果出现计数器不连续或首尾值不对,报文的接收方会认为丢帧。
其实对于整个CAN通讯需求开发内容,CAN通讯矩阵涉及内容最多,并且贯穿整个软件开发的周期。
2.4 CAN1需要支持特定帧报文唤醒,支持局部网络唤醒功能等
对于这条需求,需求明确要特定帧报文唤醒功能,即对控制器硬件设计有要求,选用的CAN收发器芯片要支持特定帧唤醒。其次需求要求支持局部网络唤醒功能,因此涉及到复杂的网络管理策略。以底盘域的网络唤醒例子来理解,如下所示:
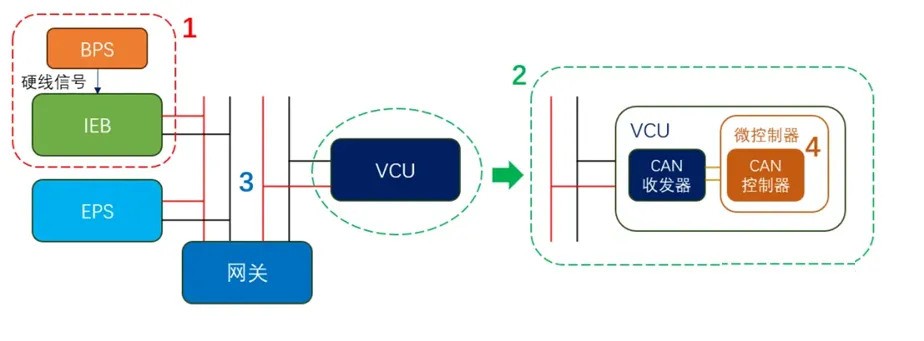
一个ECU可能存本地唤醒和网络唤醒等,比如上图中假设IEB的本地唤醒源是制动踏板行程传感器BPS,即某个唤醒场景下,BPS感知到变化,以硬线信号形式传给IEB,那么处于休眠的IEB将被唤醒,对应着图中1区域。IEB唤醒后将请求唤醒EPS和VCU参与功能控制,这部分与网络唤醒策略相关。
以上就列举了一个典型的网络管理场景,要实现这样的场景,会涉及几个方面内容:
唤醒功能逻辑需求,以怎样的逻辑精准识别唤醒源;
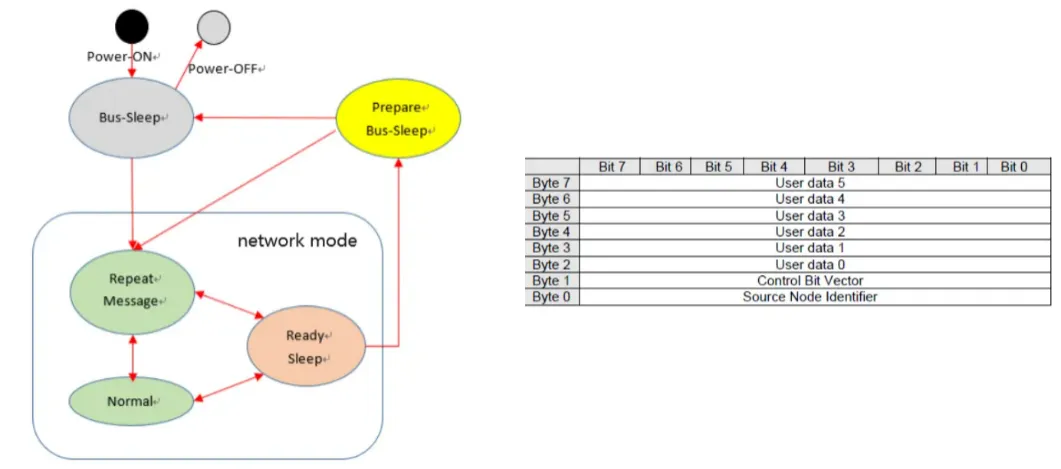
网络管理状态机需求,采用怎么样形式,AutoSAR NM吗?以及状态之间的跳转条件和每个状态下的动作是怎样定义的;
网络管理报文需求。网络管理报文内容是怎么定义,接收与发送的规则是怎样的等。
上述这些内容唤醒源检测会涉及到硬件设计,在硬件具备的情况下,那么开发的内容均由软件来实现。关于网络管理需求的实现,除了单个ECU自身需求实现,其实与其他ECU强相关,因为这些唤醒场景由这些ECU共同实现。
#03 CAN通讯需求总结
上文就从ECU系统视角介绍完了CAN通讯主要需求有哪些,怎么理解这些需求以及这些需求需要谁来实现。
当然还有很多CAN通讯需求本文还未提及展开,比如:
CAN总线Bus off处理需求;
CAN报文的诊断需求,比如ID检测,超时检测,Checksum校验和故障后处理措施等;
功能安全相关的E2E保护需求。
总之,CAN通讯其实是一个非常大的话题,内容非常多非常复杂,不管在主机厂还是供应商,不管是ECU系统还是ECU软硬件,都有很多相关的工作需要做,很多细节需要把控
|








