| 编辑推荐: |
|
为适应不同用户、不同路况对车辆驾驶需求的差异,在新能源汽车的应用中,通常会配备多种驾驶模式,以提升用户的驾驶体验和车辆的能源效率。本文主要介绍了新能源汽车驾驶模式相关内容。希望对你的学习有帮助。
本文来自于微信公众号觉知汽车,由火龙果软件Linda编辑,推荐。 |
|
一、概述
为适应不同用户、不同路况对车辆驾驶需求的差异,在新能源汽车的应用中,通常会配备多种驾驶模式,以提升用户的驾驶体验和车辆的能源效率。对于常见的一些驾驶模式整理如下:
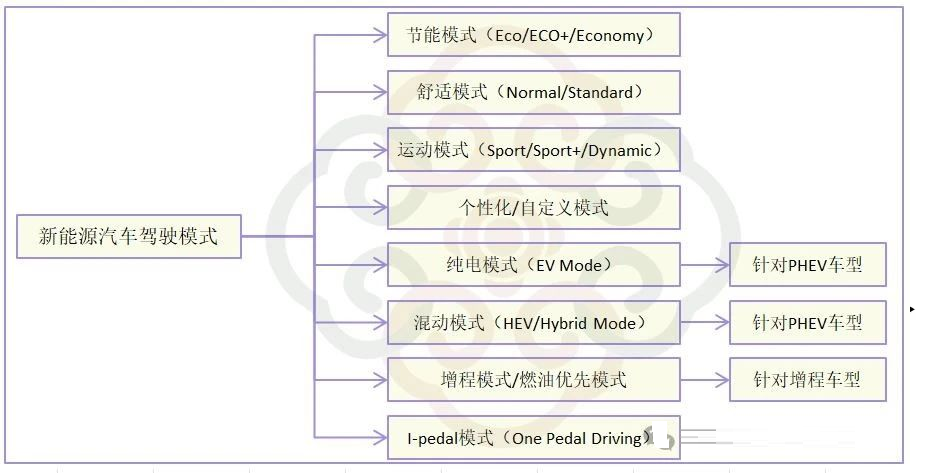
图1 新能源汽车常见驾驶模式
二、常规驾驶模式
对不同驾驶模式释义如下:
2.1.节能模式(Eco/ECO+/Economy)
此模式旨在最大化能源效率,其是通过限制驱动电机功率输出、提高能量回收力度、降低空调功耗等方式以减少整车的能量消耗。由于该模式下,油门踏板的“灵敏度”会降低,即同样的踏板行程下,车辆的反应将不如普通模式下那么迅速和强烈,这便使得车辆的加速响应会变得较为柔和,从而有助于其在城市拥堵或长途行驶中节省能源,同时由于该模式具有较低的能耗水平,因此更适合在电量较低时使用,以延长行驶里程。
在实现Eco控制策略时,为了让车辆既能有效的节能,同时又可维持基本的驾驶性能,通常会将此模式作为车辆的默认驾驶模式或可选模式之一,并可让驾驶员通过控制界面主动选择启动该模式与否,一旦确定该模式后,车辆将进入节能策略。
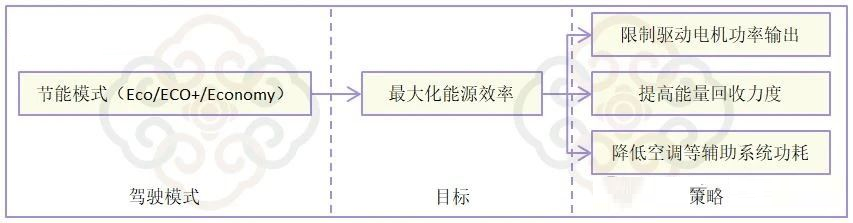
图2 Eco模式
此策略下,基于车辆的额定输出功率,将通过分析车辆性能、电池容量、预期节能效果、驾驶体验等因素,对驱动电机的最大输出功率进行限制(该数值根据实际车辆状态而定),但此限制功率并非简单地将驱动电机的输出功率固定在一个预设的低水平上,而是需根据当前的驾驶条件动态地调整功率上限,以此来优化能源使用效率,并同时能够确保车辆可应对不同的驾驶需求。
如当车辆在平直道路上匀速行驶时,若此时车辆处于轻载状态,可进一步降低驱动电机的功率上限,以维持该速度所需的较小驱动力。当车辆处于爬坡或重载情况下时,系统可适当提高功率上限,确保车辆有足够的动力应对即时的驱动力需求。又如,当识别到驾驶员有急加速需求时,则临时提升功率上限以快速响应此需求等。
总之,动态调整驱动电机输出功率上限,并非改变预设的绝对上限值,而是在节能模式的大原则下,根据具体情况灵活调整,既满足节能目标,又确保驾驶安全和舒适性。
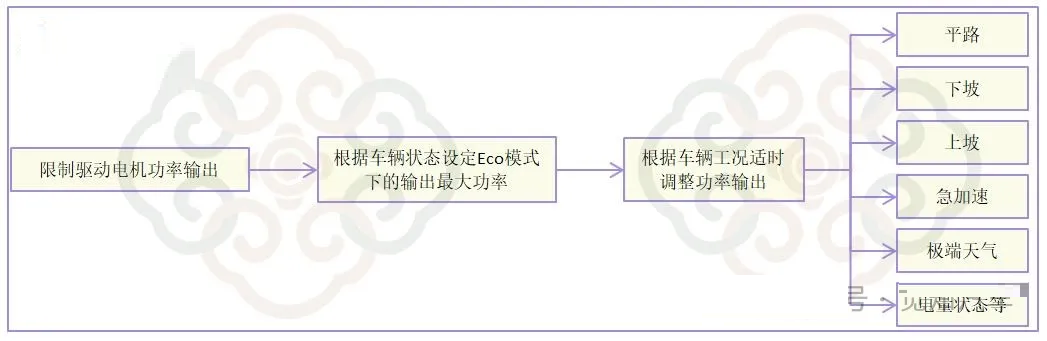
图3 Eco下的驱动电机输出功率变化
在能量回收方面,将通过增加系统敏感度,尤其是在减速和下坡时,可更积极地回收动能为动力电池充电。同时在部分场景中,将限制空调的功率,如减少压缩机工作频率或降低风量,以减少系统电能消耗,并通过限制或关闭非必要的电子附件(如座椅加热、大灯亮度调节等),以进一步减少能耗。
如上所述,此模式下的系统动态控制策略主要围绕着优化能量消耗、保持驾驶流畅性和确保必要的动力响应展开。在实际的项目开发过程中,在设计Eco模式的控制策略时,对于一些主要的应用场景,如低速蠕行、频繁启停、上下坡等,需制定合理的阈值和判断条件,以帮助系统智能识别当前驾驶状态,并据此调整车辆的动力输出和能量管理策略。
对于Eco模式下的一些典型阈值及判断条件示意如下:
1)低速蠕行或频繁启停
通常情况下,当车速处于10-20km/h的速度区间时,将被识别为低速蠕行状态,此时可通过阈值的设定,当车速低于此值时,便激活Eco下的特殊控制策略,如进一步限制驱动电机输出功率、增加能量回收强度等。
同时,通过监测车辆在一定时间内(如1分钟)停车和启动的次数,当次数超过设定阈值时,系统判断为频繁启停,进而调整控制策略,以减少频繁启动时的能耗。
2)上坡路段
通过角度传感器来判断车辆是否处于上坡状态,通常当坡度超过一定角度时,系统会认为车辆正在上坡,此时通过动态调整功率限制上限,以确保有足够的动力完成爬坡。这个调整可以基于当前车速、坡度和电池状态。如坡度每增加一定比例,则允许电机的输出功率上限增加一定百分比,能在确保动力充沛的同时,避免过度消耗电池电量。
注意,在策略开发中,无论是对于判断条件、阈值还是其他可实现节能措施的参数进行设定时,首先需以安全第一为首要原则,如到紧急加速需求时,应立即解除功率限制,好为车辆提供必要的动力需求。其次,对于阈值和判断条件的设定,应具有一定的动态适应性,可以根据车辆当前的负载、SOC、外界温度等因素进行调整。最后,在节能的同时,需考虑驾驶和乘坐的舒适性,如空调系统的调整不应让乘客感到不适。通过这些判断条件和阈值的设定,车辆能够更加智能地在节能与性能需求之间找到平衡,确保在各种驾驶环境下都能实现高效且舒适的驾驶体验。
2.2.舒适模式(Normal/Standard)
在大多数车型上,作为日常驾驶的默认模式,其适用于大多数日常驾驶场景,旨在为用户创造一个既节能又舒适的驾驶体验,该模式的目标是追求动力输出、行驶平顺性、能源效率以及驾驶舒适度之间的最佳平衡。当车辆开启此模式时,其在动力输出、能量管理、系统协同以及乘坐舒适性等方面表现出相关特性。
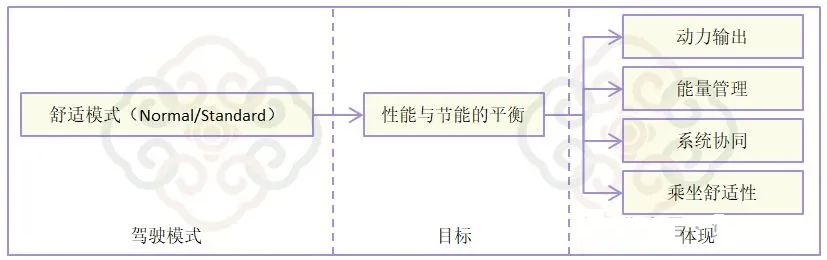
图4 舒适模式
首先,车辆的动力输出会被调校得更加平顺和线性,以减少加速过程中的突兀感,从而使车辆加速更为柔和,以此为用户提供稳定的驾驶体验。过程中,驱动电机的扭矩输出曲线会被优化,优化的目标之一是减少扭矩输出曲线的波动,使得在不同转速下,扭矩的增减变化更加连续和平缓,从而减少车辆加速过程中的突兀感。此优化过程还包括调整驱动电机的转矩响应速度,以确保在驾驶员需要动力时能够迅速响应,而在不需要时迅速衰减,以此来提高驾驶的动态响应性,并通过高效区的尽可能应用,让车辆的能耗得以降低,避免了不必要的能耗。
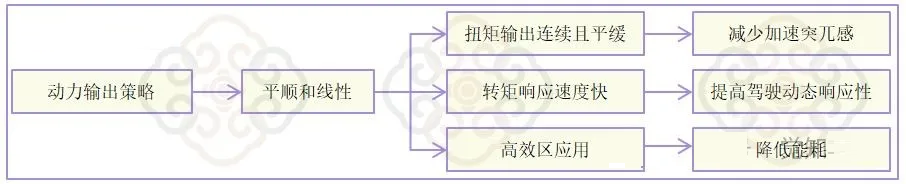
图5 舒适模式下的动力策略
在优化后,驱动电机处于低转速区域时,其扭矩输出具有快速上升的特性,能够为车辆提供足够的起步牵引力,从而让车辆具有较好的零百加速时间。在常用转速范围内,其扭矩输出保持相对平坦且高效,以确保动力输出稳定且经济。在高转速区域,其扭矩会呈逐步下降趋势,以避免进入高能耗低效率状态,同时确保动力输出的平滑过渡。
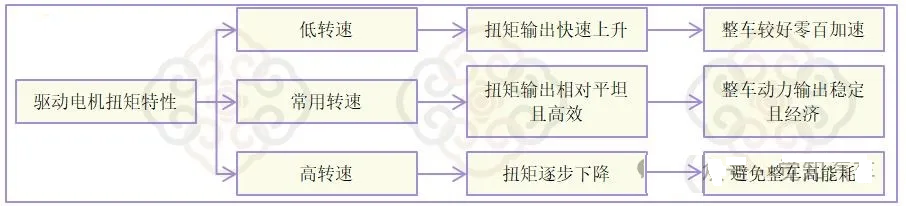
图6 驱动电机输出特性示意
其次,在能量管理方面,为实现动力与能耗的平衡,此模式下,系统既不会过分限制驱动电机输出以牺牲驾驶体验,也不会过度消耗电池能量,同时能量回收的介入程度也将处于适中水平。如当有能量回收时,系统会根据车辆的如车速、SOC等状态,去调节其强度,以避免在减速时产生过于强烈的拖拽感,进而影响乘坐舒适性。
再次,舒适模式下的系统协同特性主要针对悬挂系统和转向系统而言。此模式下,为了提升舒适度,车辆的悬挂系统会被设定为中等偏软,以增加阻尼器的吸震能力,从而减少路面不平带来的颠簸感,进而减少振动传递到车厢内部,使车辆行驶更加平稳。同时,转向系统也会相应调整,以提供更加轻盈的转向助力,既保证低速时的轻便性,又确保高速行驶时的稳定性。
最后,在舒适模式下,车内环境的舒适性主要表现在空调系统上,此时的空调系统会根据外界条件自动调节控制,以保持车内温度和湿度在一个舒适的范围内,同时为避免过度消耗电池电量,其将会更侧重于保持恒温而不是快速制冷/制热。
通过诸如这些策略的应用,新能源汽车在舒适模式中实现了动力性能、能源效率和驾驶舒适度的均衡。
2.3运动模式(Sport/Sport+/Dynamic)
运动模式旨在为用户提供更加动感、响应迅速的车辆性能,以提升其驾驶体验、增强驾驶乐趣。此模式下,需对车辆的动力输出、悬挂、转向、能量回收等多个方面进行调整,以实现车辆性能表现的最大化。
其中,在动力输出方面,会采用更积极的动力输出曲线,使得踏板响应更直接,即较小的踏板行程就能激发较大的动力输出,同时会解除常规模式下的扭矩输出限制,允许驱动电机达到更高的功率输出水平,而在某些运动车型中,会通过解锁额外的功率储备以增强车辆性能。过程中,将会保持驱动电机在较高的转速范围运行,以确保动力输出的即时性和连续性,当然这将意味着更高的能耗。对于PHEV来说,在运动模式下,可能会增加内燃机的参与度,以共同为车辆提供更强的动力。
在不同模式下,对于加速踏板信号的处理是让整车具有‘绵柔’、‘适中’以及‘推背感’的直接体现,为此在不同模式下对此信号的处理方式也有差异,以简易示例说明,系统如何根据不同模式调整踏板信号对应的电机输出功率,如下:
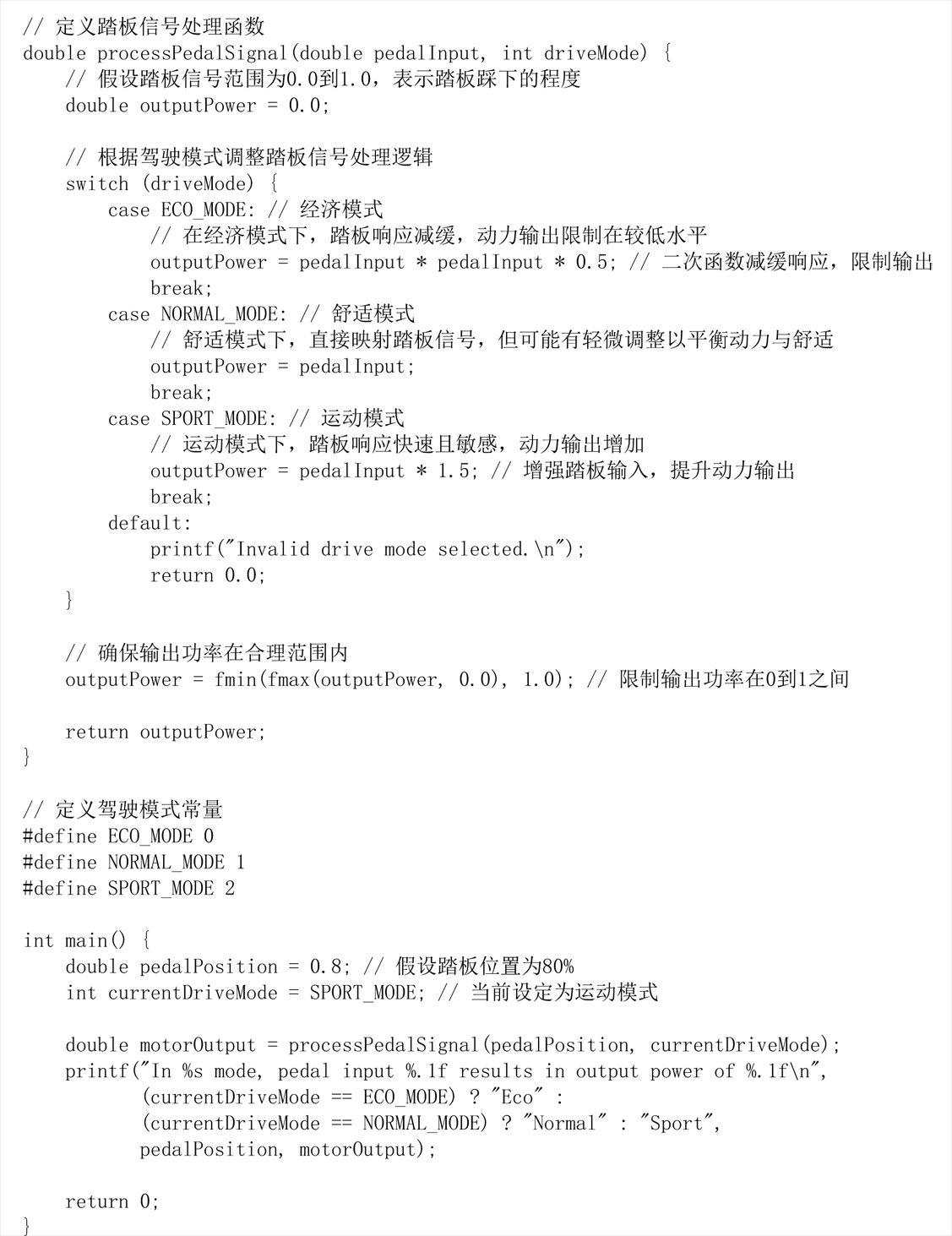
图7 不同模式对于踏板信号的处理
在示例中,通过process Pedal Signal函数接收踏板信号(pedal Input)和当前的驾驶模式(drive
Mode)作为输入,然后根据不同的模式计算出驱动电机的输出功率。每种模式下踏板信号的处理逻辑同,经济模式下通过平方函数减缓踏板响应,舒适模式下直接映射踏板信号,而运动模式则通过乘以一个系数来增强踏板输入,从而提升动力输出,最后,通过fmin和fmax函数确保输出功率保持在合理的范围内。在实际开发中,还需根据传感器数据、车辆状态、安全限制等信息进行结合处理。
在系统协同上,通过快速改变阻尼系数,让悬挂系统变得更“硬朗”,以减少车辆过弯时的侧倾风险,从而提升操控稳定性。同时通过调整转向助力系统,使方向盘的转向响应更加直接和精确,减少转向时的虚位,以提升驾驶员对车辆操控的感知和控制精度。此模式下,为了减少能量回收过程中对动力输出的干扰,通常会减少或关闭制动能量回收的强度,以确保在需要全力加速时,不会有能量回收系统带来的减速感。
综上所述,在分布式电子电气架构的新能源汽车中,VCU通过接收并处理整车相关数据,同时根据当前选定的驾驶模式,向动力系统、BMS、MCU等单元发送相关控制指令,以调节车辆的动力输出、能量回收、空调系统、悬挂系统等,从而实现不同驾驶模式下的性能表现和能耗管理。对常规驾驶模式下的系统拓扑及可能的参与节点示意如下:

图8 常规驾驶模式下的网络拓扑示意
对常规驾驶模式梳理如下图:
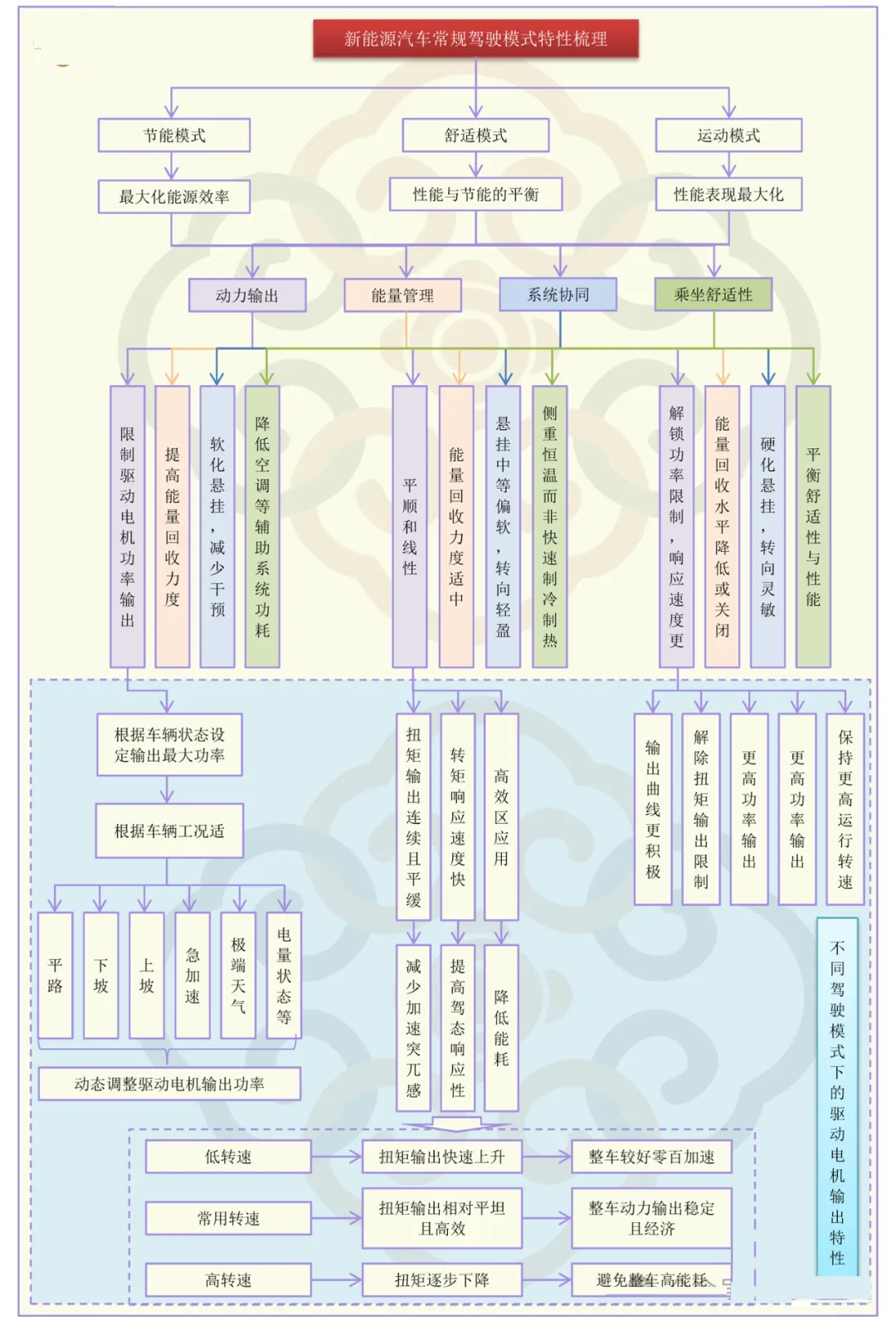
图9 新能源汽车常规驾驶模式梳理
2.4.PHEV的纯电模式与燃油优先模式
在PHEV车型中,为了向用户提供不同场景下的不同驾驶体验,常根据车辆的能源优先原则设定有纯电优先模式以及燃油优先模式。其中纯电优先模式是通过最大化利用动力电池电能,以确保车辆始终具有较高经济性的驾驶模式。
此模式下,在加速踏板信号的处理方面,将基于经济、节能为优先考虑,会使其调整的更加线性和平滑,以减少能耗。同时为提高能源利用率,系统将最大化能量回收力度,以延长纯电行驶距离。又由于该模式下,需要动力电池尽可能多的为车辆提供能源,因此在策略上通常会将电量阈值设定的较低。即在整车运行中,只有当SOC低于此阈值时,为了避免电池过渡放电,系统才会自动切换到混合动力模式或燃油优先模式。对此模式的整车运行方式示意如下:

图10 PHEV车型的纯电驾驶模式
相对于纯电优先模式中的经济性目标,在燃油优先模式中,车辆将更侧重性能与节能的平衡,同时燃油优先模式将通过最大化内燃机应用,为车辆提供更长的续航以及更高的性能。首先,在控制策略方面,为确保有足够的电量供后续纯电行驶或动力需求,系统会设定一个相对于纯电模式下更高的SOC阈值(如70%),当SOC低于此值时,将通过优先消耗燃油的方式驱动车辆运行。
其次,该模式下,车辆的动力输出会更加注重性能,因此对于加速踏板信号的处理会相对更为灵敏些,但在能量回收方面,将不如纯电模式那样积极,以减少对混动系统工作周期的影响。
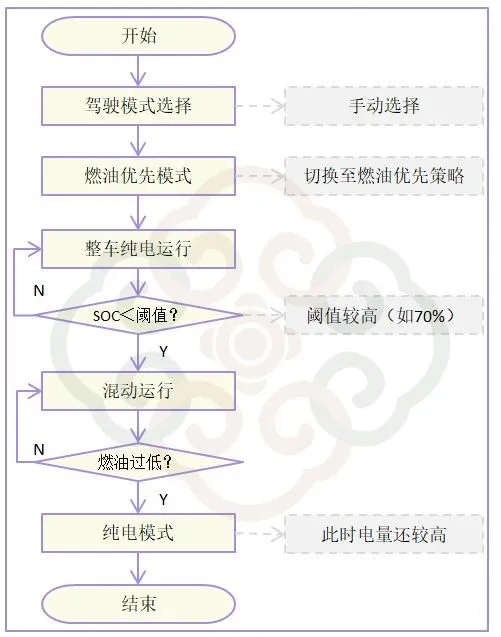
图11 PHEV车型的燃油优先驾驶模式
2.5. I-pedal模式(Integrated/ Intelligent,即单踏板,One Pedal
Driving)
‘单踏板’、‘集成式’是基于其工作模式而命名,而并非指刹车制动踏板与加速踏板在物理形态上集成为一个。此模式是在新能源汽车尤其是纯电车型中应用的一种创新驾驶模式,此模式允许驾驶员通过单一的加速踏板控制车辆的加速、减速乃至停止(不能将车速降低为0的强制性要求正在制定),从而简化驾驶操作,提高能效。
在I-pedal模式下,其工作原理是,当驾驶员踩下加速踏板时,车辆加速如同传统驾驶模式,而当驾驶员逐渐松开踏板时,驱动电机将由驱动模式过渡到发电模式,并通过能量回收系统将车辆的动能转换为电能,此过程中,车辆将实现减速甚至停车。

图12 I-pedal模式
基于其基本工作原理,I-pedal模式下实现‘加、减、停’一体化控制的核心机制是通过增强的能量回收系统来达成,但其相对于非I-pedal模式下的能量回收策略而言,此模式的应用也不仅仅是回收强度的简单增大,而是整个车辆控制系统策略的集成与优化。
如在能量回收与动力系统的协同方面,系统会更精细地管理驱动电机的角色转换,即当驾驶员松开踏板时,电机将实现从驱动模式到发电模式的平滑切换,过程中电机转矩的减少与车辆减速需求完美匹配,从而实现平滑减速。而当加速踏板被踩下时,系统会立即停止或显著减少能量回收过程,进而会让电机从能量回收切换到动力输出模式,以确保动力的即时响应,这一切换过程被设计得尽可能平滑,以避免对加速性能产生任何不利影响。在非I-pedal模式下,为了尽量不对车辆性能造成影响,通常的做法是通过降低或关闭能量回收策略。
同时,为了向用户提供更好的驾驶体验,I-pedal模式下,系统会通过算法调整能量回收曲线,使得松开踏板时的减速过程更加线性、可预测,以减少突兀感。简而言之,在I-pedal模式实现一体化控制的背后,能量回收机制的应用虽是核心,但又不仅仅是通过能量回收强度的简单增大,而是基于对车辆动力系统、能量回收系统、刹车系统以及驾驶员意图的深度整合与优化后的具体表现。可以这么说:单踏板模式在车辆动力系统与整车匹配上要远强于传统方式,也正是基于其背后的技术先进性,国内新能源汽车也纷纷搭载了该模式,只不过并非首创,因此没有对此进行宣传。
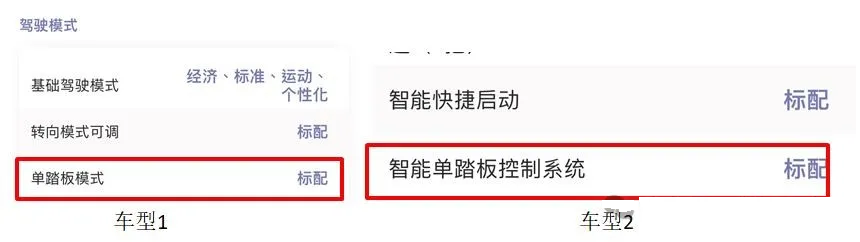
图13 非特斯拉搭载的单踏板模式
当下,为让用户可根据个人偏好、驾驶习惯以及当前行驶环境去调整车辆状态,在大多数配备I-pedal模式的车辆中,会允许驾驶员通过中控屏、实体按键等对能量回收强度进行设定,以实现灵活地调整能量回收强度。但对于初次使用I-pedal模式的用户而言,可能需要一段时间来适应,尤其是对于习惯传统驾驶方式的人来说,需要学习如何通过加速踏板去实现精确的减速控制。
另外,根据国标GB 7258《机动车运行安全技术条件》、《乘用车制动系统技术要求及试验方法》等相关条例,其对车辆减速时的灯光进行了要求,因此在I-pedal模式下,当驾驶员松开加速踏板,车辆通过能量回收实现减速时,当减速速率达到了预设阈值后,即使未直接踩下刹车踏板,系统也会自动激活刹车灯,以对后车进行安全提醒。

图14 自动/再生制动对刹车灯的要求
如上所述,对PHEV及纯电下的纯电优先、燃油优先、I-pedal模式梳理如下:
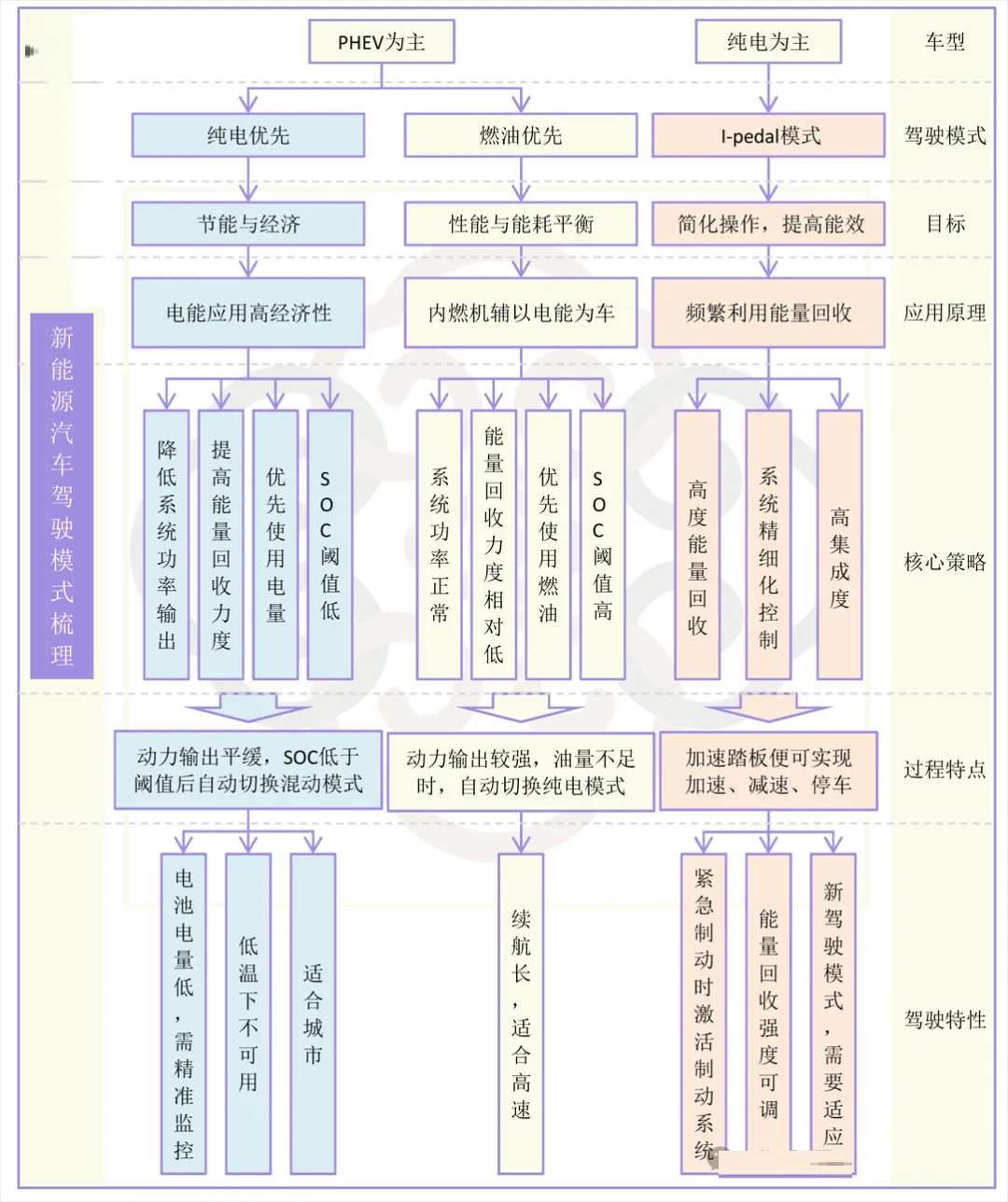
图15 新能源汽车驾驶模式梳理
注:对于单踏板模式下,车速禁止为0的主要考虑是:该模式的长期应用,会淡化制动踏板在驾驶员心中的观念,由此可能会出现在紧急情况下,部分驾驶员【难以习惯性】地踩下制动踏板。
|






 订阅
订阅