| 编辑推荐: |
本文主要介绍了基于Autosar
CP平台的汽车软件开发流程相关内容。希望对您的学习有所帮助。
本文来自于微信公众号汽车电子与软件,由火龙果软件Linda编辑、推荐。 |
|
#01
前 言
当下,基于Autosar CP(经典平台)平台开发汽车软件已成为行业的主流趋势。这一选择不仅源于Autosar架构提供的标准化、模块化和可重用性优势,还因为它能够显著提升汽车软件的可靠性、可扩展性和互操作性。
以下将详细介绍基于Autosar CP平台的汽车软件开发流程,即,对应为ASPICE 4.0标准中的SWE(Software
Engineering Process Group,软件工程过程组)3阶段,即软件详细设计和单元构建阶段。
#02
开发前的准备
在做软件单元构建前,应该完成软件需求分析与软件架构设计:
1. 需求分析
在Autosar CP平台下,软件开发的第一步是详细的需求分析。此阶段旨在明确系统的功能需求、性能要求以及与其他系统的交互接口。通过制定详尽的需求规格说明,为后续的设计和实现奠定坚实基础。ASPICE
4.0强调在此阶段需要定义并结构化软件需求,确保与系统需求和系统架构保持一致。
2. 软件架构设计
接下来是软件架构设计阶段,依据需求分析的结果,设计软件的总体架构和模块划分。Autosar架构的分层模型(应用层、运行时环境层、基础服务层和硬件抽象层)在这一阶段得到充分体现。ASPICE
4.0要求在此阶段定义静态和动态的软件架构,并分析其一致性和可追溯性,确保设计满足需求规格。
以上两部分工作完成后,即可输入到软件单元构建开发者,对应SWE.3环节开发负责人,这一环节是软件开发周期中至关重要的一个阶段,它标志着从理论设计向实际编码实现的过渡。输入物包含各项需求文档、系统文档,这些文档详细阐述了软件应实现的功能、性能要求、用户接口定义以及系统整体的运作流程。
但是,更为重要的是软件架构描述文档:Office文档与ARXML文档:
Office文档包括但不限于系统架构图、模块划分图、接口定义表等。这些图表和文档通过文字、图形相结合的方式,清晰地展示了软件的整体架构、各模块间的层次关系和交互方式,为开发团队提供了直观的视觉参考;
ARXML文件则是将上述信息转化为满足Autosar标准信息格式的xml开发文件。
#03
导入Arxml
ARXML(AUTomotive open Systems ARchitecture eXchange
format)文档则是一种专为汽车行业设计的XML格式文件,它用于在Autosar环境下精确地描述软件的架构信息。ARXML文档包含了软件组件的定义、接口规范、运行时环境配置等详细信息,这些信息对于开发团队在Autosar
CP平台上进行软件单元构建至关重要。
通过自动化工具将ARXML转化为具体的软件代码结构。生成的代码框架通常包括一系列的源文件、头文件以及配置文件,它们共同构成了软件项目的初始骨架。这些代码框架不仅遵循了AUTOSAR的编程规范和命名约定,还体现了软件架构的设计思想和要求。
ARXML一般包含多个信息包(AUTOSAR包,AR-PACKAGES),比如:
1. 通信信息
比如网络通信节点、信号、PUD、Frames等信息;
Frames包含了名称、大小等信息:
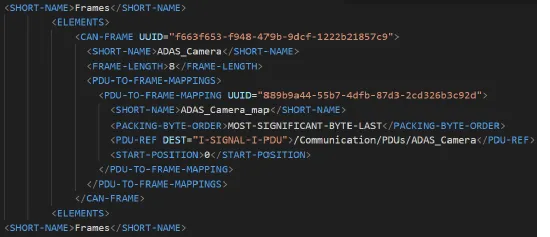
Frames示意
NM,网络管理,包含了通信节点名称、拓补、收发关系等的体现:

网络节点信息示意
Signal包含信号的name、长度、初始值、Base Type等信息:
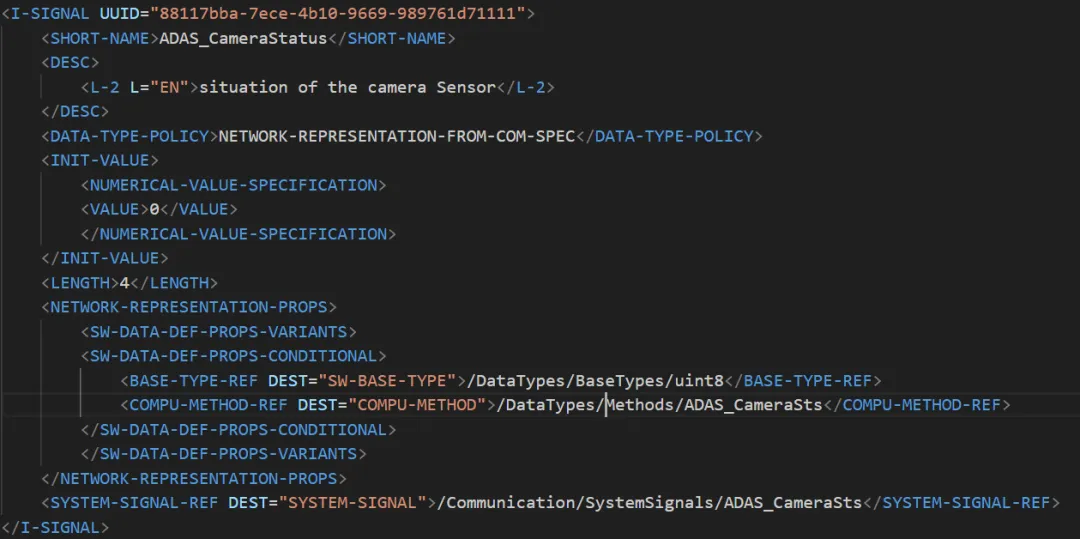
Signal示意
2. 数据类型定义
最常见的就是对基础数据类型与应用数据类型的定义;
如,布尔基础数据类型的定义信息:
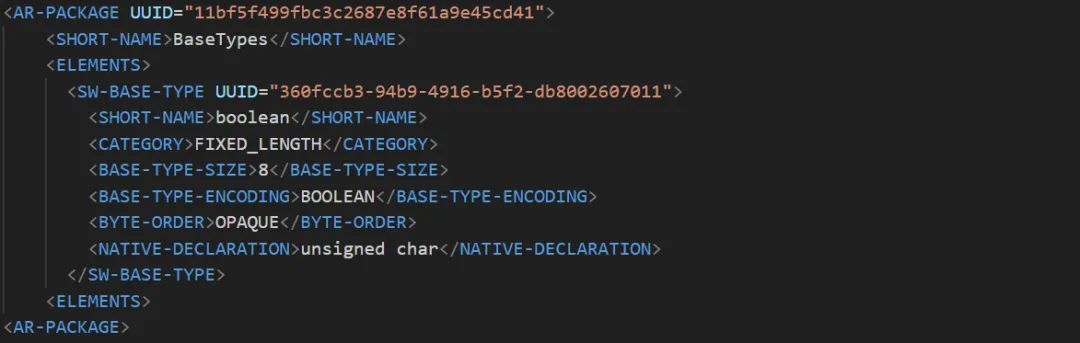
基础数据类型定义示例
自定义的应用数据类型(ADT),如数组等:
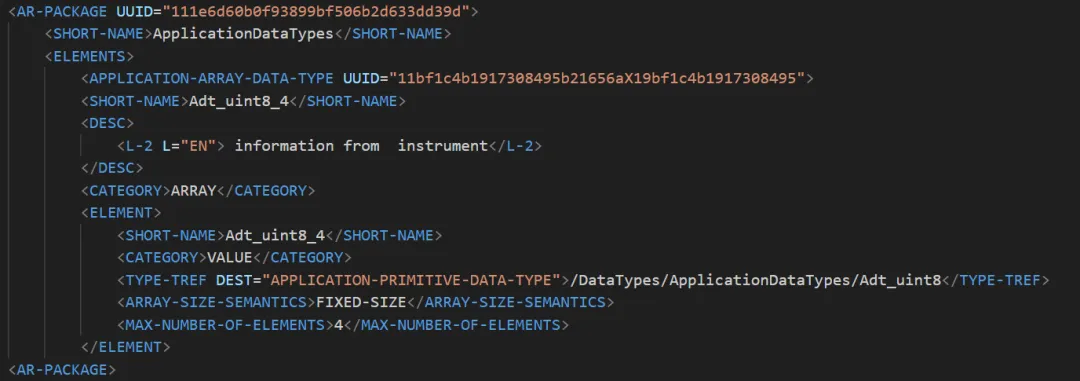
应用数据类型(数组)定义示例
3. 系统
一般会有网络拓补信息、SWC与ECU对应的Map信息:
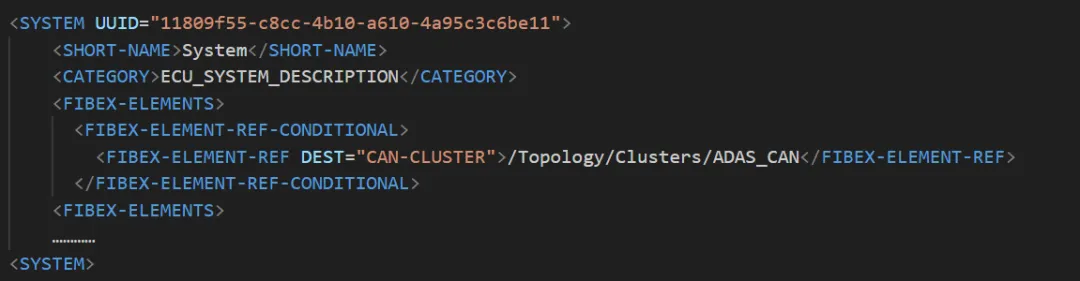
CAN通信拓补示意
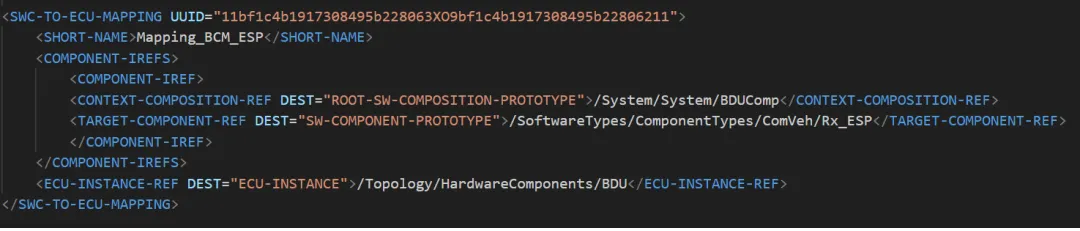
SWC的Map信息示意
4. 软件组件类型
通常包含了SWC的port类型,即是P port/ Sender Port,还是R port/Receiver
Port,指明port名称及收发关系;也会有Interface信息,说明If的名称、对应数据类型等;
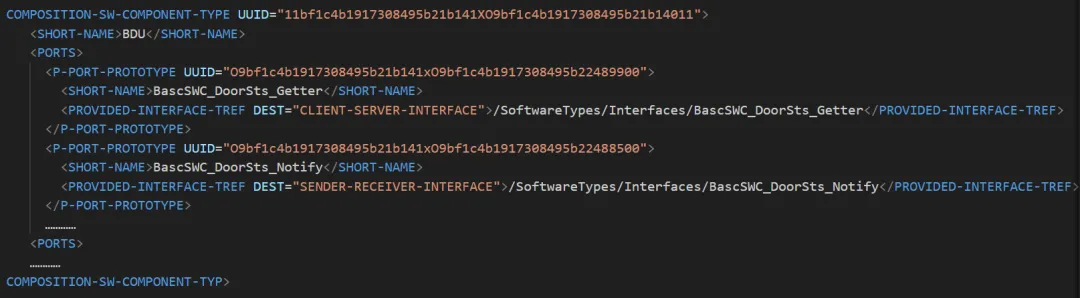
SWC的Port类型信息示意
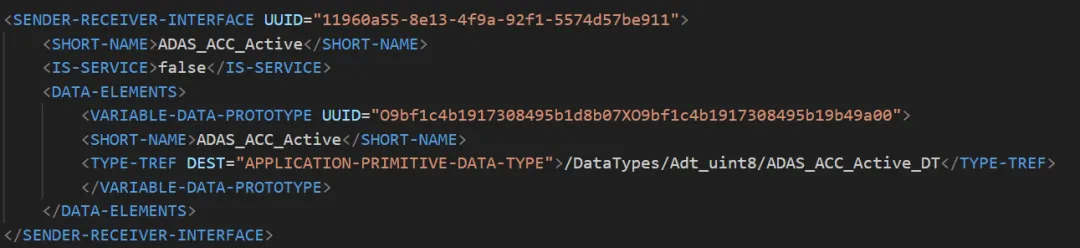
SWC的Interface信息示意
5. 其他
ARXML中也可以包含诊断、路由、内存管理、安全配置等信息,内容很是丰富,可扩展性极强;
使用相应的开发工具,如Simulink,生成应用层代码框架,用于后续的应用层逻辑开发,Vector的DaVinci
Developer、EB Tresos等也可以用于导入ARXML文件、配置BSW、生成RTE代码。
#04
MBD模型搭建
Simulink通过其模块(例如输入/输出端口和子系统)与AUTOSAR的组成部分(如发送/接收端口、客户端/服务器端口以及可运行实体等)之间建立直接的映射关系,从而实现对AUTOSAR架构的支持。这种方式允许Simulink模型与AUTOSAR软件组件(SWCs)无缝集成;
可以将ARXML文件导入Simulink,这一步需要使用ARXML Importer:通过MATLAB的命令行或脚本,利用ARXML
Importer功能来导入ARXML文件。这通常涉及到调用特定的函数或工具箱中的方法:
% 创建一个ARXML Importer对象;
ar = arxml.importer('BCM_ASWC.arxml');
% 验证导入是否成功,并检查ARXML文件的内容;
disp(ar.info); % 显示导入文件的基本信息。
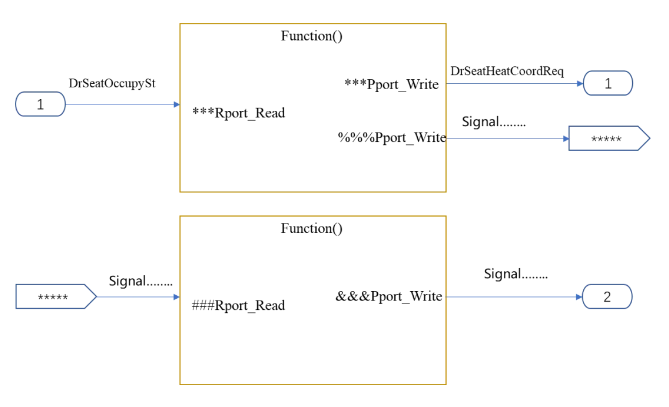
利用导入的ARXML信息,可以使用ar.createComponentAsModel方法自动创建Simulink模型中的SWC组件及其关联信息。这个方法会根据ARXML文件中定义的组件、端口和参数,在Simulink中生成相应的子系统或模块
% 假设BCM_ASWC.arxml中定义了名为"MainController"的SWC;
swcModel = ar.createComponentAsModel('MainController');
% 将生成的SWC模型添加到当前Simulink模型中;
add_block(swcModel, 'myModel'); % 假设当前Simulink模型名为'myModel',这里需要根据实际情况调整;
% 验证SWC模型是否已正确添加到Simulink中;
open_system('myModel/MainController'); % 打开并查看SWC模型。
生成类似于下图的模型,继而由应用层软件开发工程师按照软件需求,补充逻辑,最后生成应用层代码及给到BSW层开发集成的ARXML文件。
#05
BSW配置
在汽车控制器软件开发流程中,基础软件配置(BSW配置)是至关重要的一环,它直接关系到控制器的稳定性、性能及可维护性。
1. MCAL(微控制器抽象层)配置:
硬件接口适配:根据所选微控制器的具体硬件特性(如定时器、中断、ADC/DAC、CAN通信接口等),通过配置工具对MCAL进行定制,确保软件能够高效地与硬件交互。
驱动参数优化:针对特定应用需求,调整驱动程序的参数设置,如波特率、采样率、中断优先级等,以优化系统性能和响应速度。
错误处理机制:配置MCAL层的错误检测和恢复策略,包括硬件故障的诊断和隔离,以及软件层面的异常处理流程,增强系统的鲁棒性。
2. ECU抽象层配置:
ECU资源分配:根据控制器功能需求,分配ECU内部资源(如RAM、Flash、CPU时间片等),确保各功能模块之间资源使用互不冲突且高效。
任务调度策略:配置任务调度器,定义任务的优先级、执行周期及相互间的依赖关系,以实现多任务间的有序、高效协同工作。
接口标准化:定义ECU与外部系统(如传感器、执行器、其他ECU)的通信接口协议,确保数据交换的一致性和可靠性。
3. 服务层配置:
网络管理服务:配置网络管理协议(如SOME/IP、DoIP等),管理ECU之间的网络通信,包括节点发现、消息路由、安全认证等。
诊断服务:根据ISO 14229(UDS)等标准,配置诊断服务接口,支持故障码读取、ECU重置、数据上传下载等诊断操作。
4. 配置流程与工具链:
整个BSW配置过程通常通过专用的工具链完成,这些工具链集成了配置编辑器、代码生成器、仿真验证平台等多个组件。工程师首先使用配置编辑器定义各模块的参数和属性,然后利用代码生成器自动生成相应的源代码和配置文件。在配置完成后,还需通过仿真验证平台对配置结果进行测试,确保所有模块能够按照设计要求正确运行。
#06
软件集成
在汽车控制器软件开发的最后阶段,软件集成是确保所有软件组件无缝协作、形成功能完备系统的关键环节。这一过程不仅要求高度的技术精准性,还需细致的项目管理和严格的测试验证。
1. 生成RTE(运行时环境):
工具链运用:首先,我们利用AUTOSAR标准兼容的工具链,如DaVinci Configurator、Vector
CAST等工具,来启动RTE代码的生成流程。这些工具链提供了丰富的配置选项和直观的界面,便于工程师根据项目需求进行精细化设置。
RTE:RTE代码作为应用层软件组件(SWCs)与基础软件之间的桥梁,其生成过程至关重要。它负责定义组件间的通信接口、数据交互方式以及服务调用的具体实现,确保应用层能够高效地调用基础软件提供的服务,同时基础软件能够准确响应应用层的需求。
自动化生成:通过工具链的自动化功能,我们可以根据预定义的组件配置和接口定义,自动生成RTE代码。这一过程大大减少了手工编码的工作量,提高了开发效率和代码质量。
2. 集成基础软件和应用层:
模块化集成:在生成RTE代码之后,我们开始将基础软件模块(如MCAL、服务层等)与应用层软件组件进行集成。这一过程遵循AUTOSAR的模块化设计原则,确保各模块之间具有清晰的接口定义和独立的功能边界。
配置与验证:集成过程中,我们需要仔细配置各模块之间的连接参数和交互逻辑,确保它们能够按照设计要求协同工作。同时,可以利用仿真工具和测试环境对集成后的软件进行初步验证,以确保其功能的正确性和稳定性。
生成完整ECU软件:经过上述步骤的反复迭代和优化,最终我们将生成完整的ECU软件。该软件不仅包含了所有必要的基础软件模块和应用层软件组件,还具备了高效、稳定、可维护的特点,能够满足ECU对实时性、安全性和可靠性的严格要求。
|






 订阅
订阅