| 编辑推荐: |
本文主要介绍了什么是AUTOSAR中的虚拟总线功能?在AUTOSAR架构中起什么作用?
希望对您的学习有所帮助。
本文来自于微信公众号旧友与酒,由火龙果软件Linda编辑、推荐。 |
|
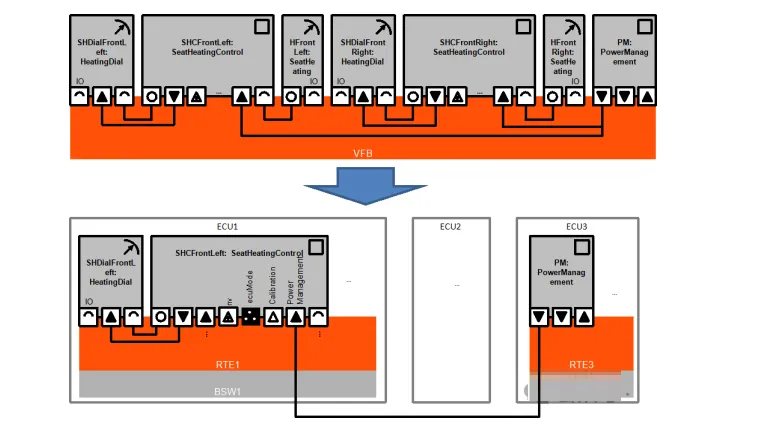
在AUTOSAR架构中,虚拟总线(Virtual Functional
Bus,VFB)是一个重要的抽象层,它主要用于分离应用软件与底层硬件之间的依赖关系。虚拟总线功能的主要目的是在不依赖具体硬件和总线协议的情况下,实现ECU之间的通信。
虚拟总线(VFB)的功能和作用
1、通信抽象:VFB作为一种抽象的通信总线,可以让不同的AUTOSAR软件组件(SWC)之间在逻辑上相互通信,而不需要考虑底层的硬件细节。这样,无论实际部署在哪个ECU上,组件间的通信都能实现。
2、解耦软件和硬件:通过VFB,软件组件的开发可以独立于硬件平台。软件工程师只需关注应用逻辑,不必关心ECU硬件及其物理通信接口。这种解耦机制为软件的跨平台移植提供了便利性。
3、支持分布式开发:由于VFB的存在,开发团队可以独立开发各自的SWC,并通过标准化接口进行集成测试。这样可以简化软件组件的集成,方便在多ECU分布式系统中的部署。

4、简化测试与验证:在开发和测试阶段,可以通过VFB来模拟实际的ECU间通信,而不依赖真实的硬件环境。这样可以在仿真环境下完成大部分测试,降低开发成本。
虚拟总线的工作方式
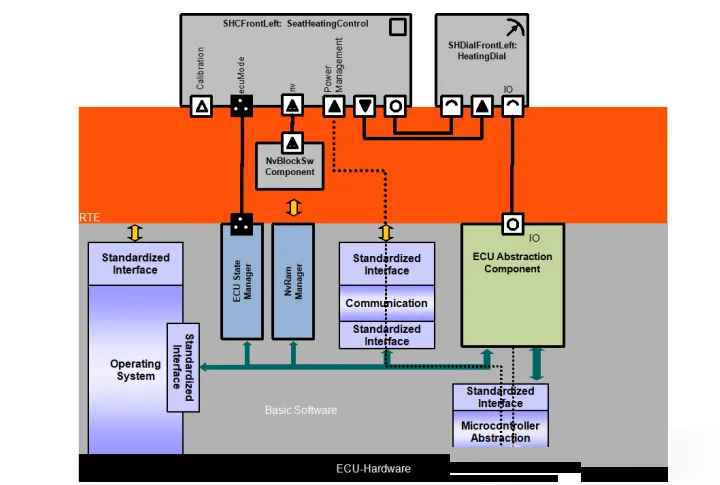
虚拟总线实际上并不是真实存在的物理总线,而是由AUTOSAR中间件(RTE,Run-Time Environment)在后台模拟实现的。RTE在运行时为每个SWC提供标准化的通信接口,负责在不同的SWC之间传递数据。以下是虚拟总线的基本工作流程:
接口抽象:VFB通过接口(Ports)为各个软件组件定义了统一的接口和通信协议,确保组件间的数据传输符合预定义的标准。
组件间通信:当一个SWC需要与另一个SWC通信时,它只需调用RTE提供的接口来发送或接收数据,VFB在后台完成实际的数据路由。
自动代码生成:AUTOSAR工具链能够根据VFB配置生成RTE代码。RTE代码实现了组件之间的通信逻辑,使得开发人员不必手动编写复杂的通信代码。
示例
在AUTOSAR中,虚拟总线(VFB)通信的实现主要通过接口和端口的配置以及RTE(Run-Time
Environment)代码来实现。以下是一个简化的AUTOSAR风格的代码示例,通过C语言展示了VFB的通信机制。
假设有两个软件组件:
1. EngineStatus组件(位于ECU1):用于监控发动机转速,并将其作为输出数据。
2. Display组件(位于ECU2):接收并显示发动机转速数据。
(1).定义接口和端口
假设我们需要通过一个接口"EngineSpeedInterface"来传递"EngineSpeed"数据。
// Interface definition (EngineSpeedInterface.h)
#ifndef ENGINESPEEDINTERFACE_H
#define ENGINESPEEDINTERFACE_H
// 定义一个类型用于传输发动机转速数据
typedef uint16_t EngineSpeedType;
#endif //ENGINESPEEDINTERFACE_H
|
(2).定义RTE(Run-Time Environment)API
AUTOSAR工具链通常会根据配置自动生成这些RTE函数。假设生成了以下RTE接口代码:
//RTE_EngineStatus.h
#ifndef RTE_ENGINESTATUS_H
#define RTE_ENGINESTATUS_H
#include "EngineSpeedInterface.h"
// 用于EngineStatus组件的API,设置发动机转速
void Rte_Write_EngineStatus_EngineSpeed(EngineSpeedType
speed);
#endif // RTE_ENGINESTATUS_H
// RTE_Display.h
#ifndef RTE_DISPLAY_H
#define RTE_DISPLAY_H
#include "EngineSpeedInterface.h"
// 用于Display组件的API,获取发动机转速
Std_ReturnType Rte_Read_Display_EngineSpeed(EngineSpeedType
*speed);
#endif //RTE_DISPLAY_H
|
(3).实现组件代码
使用生成的RTE API,"EngineStatus"组件可以发送数据,而"Display"组件可以读取数据。
EngineStatus组件代码示例:"EngineStatus"组件负责监控发动机转速,并将数据发送到虚拟总线。
// EngineStatus.c
#include "RTE_EngineStatus.h"
void EngineStatus_MainFunction(void)
{
EngineSpeedType currentSpeed
= 2000; // 假设当前读取的转速为2000 RPM
// 将转速数据写入RTE接口,发送到虚拟总线
Rte_Write_EngineStatus_EngineSpeed(currentSpeed);
}
|
Display 组件代码示例:"Display"组件通过RTE接口读取转速数据并显示在仪表盘上。
// Display.c
#include "RTE_Display.h"
#include <stdio.h>
void Display_MainFunction(void)
{
EngineSpeedType receivedSpeed;
// 从RTE接口读取转速数据
if(Rte_Read_Display_EngineSpeed(&receivedSpeed)
== E_OK) {
// 将数据显示到仪表盘(这里模拟显示到控制台)
printf("Current Engine
Speed: %u
RPM\n", receivedSpeed);
}
else {
// 错误处理
printf("Failed to read
engine speed.\n");
}
}
|
(4).虚拟总线(VFB)功能的实现
在实际运行时,虚拟总线并不是物理上存在的,而是由RTE实现的内部数据路由。RTE会自动生成代码,将"EngineStatus"组件的输出与"Display"组件的输入连接起来。
RTE生成的代码通常如下所示:
//RTE_Implementation.c
#include "RTE_EngineStatus.h"
#include "RTE_Display.h"
static EngineSpeedType engineSpeedBuffer;
// 缓存发动机转速数据
void Rte_Write_EngineStatus_EngineSpeed(EngineSpeedType
speed) {
engineSpeedBuffer = speed;
// 将数据存入缓冲区
}
Std_ReturnType Rte_Read_Display_EngineSpeed(EngineSpeedType
*speed) {
*speed = engineSpeedBuffer;
// 从缓冲区读取数据
return E_OK; // 返回成功状态
}
|
上述示例展示了如何通过虚拟总线(VFB)在AUTOSAR架构中实现组件间的通信:
EngineStatus组件调用"Rte_Write_EngineStatus_EngineSpeed"将发动机转速数据写入VFB。
Display组件通过"Rte_Read_Display_EngineSpeed"从VFB读取发动机转速数据。
实际的RTE代码将数据从"EngineStatus"组件路由到"Display"组件,实现了逻辑上的通信,而无需依赖实际的物理总线。
AUTOSAR中的VFB通信抽象,通过RTE提供的API实现了对底层总线协议和物理连接的隔离,使得应用组件间的通信更为模块化和透明。 |






 订阅
订阅