| 编辑推荐: |
本文主要介绍了CAN、CANFD、CANXL、LIN、FlexRay、MOST、
车载Ethernet的定义、特点、应用与区别。 希望对您的学习有所帮助。
本文来自于微信公众号嵌入式软件测试开发件,由火龙果软件Linda编辑、推荐。 |
|
前言
随着现代汽车的电子化和智能化程度越来越高,汽车总线技术得到了迅速的发展,汽车总线系统也变得越来越复杂。常见的汽车总线协议包括CAN、CAN
FD、CAN XL、LIN、FlexRay、MOST、车载Ethernet等。
一、CAN系列
1、CAN
定义:CAN,即Controller Area Network(控制器局域网络),是第一代CAN通信技术,最早在1986年由德国Bosch公司提出,用于解决汽车电子系统中节点间通信的问题。
特点:
最高1Mbps的传输速率,每帧最多8个字节。
高度可靠的消息传递能力和实时性。
低成本、抗干扰能力强。
支持多节点连接,可同时进行多个设备之间的通信。
应用:广泛用于汽车电子控制系统,如发动机控制单元、制动系统等。
2、CAN FD
定义:CAN FD,即CAN Flexible Data-Rate(灵活数据率),CAN通信协议的一种变种,于2012年被引入,被视为第二代CAN通信技术。旨在解决传统CAN协议在数据传输速率和灵活性方面的局限性,支持高速数据传输。
特点:
最高可达8Mbps的传输速率(行业认可,理论上可更高),每帧最多64个字节。
保持了CAN的实时性和可靠性优势。
与现有的CAN硬件兼容。
应用:适用于需要处理更多数据量的现代汽车系统,比如高级驾驶辅助系统(ADAS)。
3、CAN XL
定义:CAN XL,即Controller Area Network eXtended Length,是CAN
FD的进一步扩展,于2020年被引入,被视为第三代CAN通信技术。旨在增加数据传输速率和灵活性。
特点:
最高可达20Mbps的传输速率,每帧最多2048个字节。
为未来的汽车应用提供更多扩展性和性能潜力。
应用:广泛应用于乘用车、商用车及特种车辆等领域,为车辆智能化、网联化转型提供技术支持。
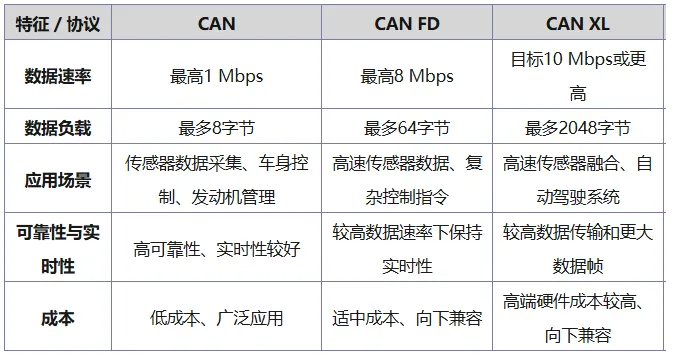
以下是CAN、CANFD、CANXL的一些典型特征对比:
二、LIN
定义:LIN,即Local Interconnect Network(局部互联网络总线),是针对汽车分布式电子系统而定义的一种低成本的串行通讯网络。
特点:
单线传输形式,传输速率较低。
对硬件要求简单,成本低。
一个LIN网络最多可连接16个节点。
应用:主要用于车身电子配件,如车窗、后视镜、大灯等。
三、FlexRay
定义:一种用于汽车的高速、确定性通信协议。它将事件触发和时间触发两种方式相结合,具有高效的网络利用率和系统灵活性。
特点:
提供高带宽和低延迟的通信。
支持时间触发和事件触发两种通信模式。
具有故障容错能力。
应用:适用于需要高实时性和可靠性的汽车控制系统,如线控系统、高级驾驶辅助系统等。
四、MOST
定义:MOST,即Media Oriented Systems Transport(面向媒体的系统传输),是一种专为汽车多媒体应用设计的网络协议。
特点:
支持高质量音频和视频流的传输。
提供同步和异步通信模式。
具有低延迟和高带宽的特点。
应用:主要用于汽车娱乐系统、导航系统和车载通信系统。
五、车载Ethernet
定义:车载Ethernet,即车载以太网(Automotive Ethernet),是指在汽车内部使用以太网技术进行数据传输和通信的网络系统。为了解决传统以太网的实时性和确定性问题,汽车行业引入了专用的车载以太网技术,如音视频桥接(AVB,Audio
Video Bridging)和时间敏感网络(TSN,Time-Sensitive Networking)。这些技术通过协议扩展和网络管理机制,提供了更精确的时间同步和优化的数据传输服务,以满足汽车系统对实时性能的高要求。
特点:
具有极高的数据传输速率和带宽。
支持大规模数据的传输和实时处理需求。
可与云服务、高清视频流等现代应用无缝集成。
应用:车载网络与云服务、远程诊断、信息娱乐系统。
六、区别
以下是上述通信协议的一些典型特征对比:
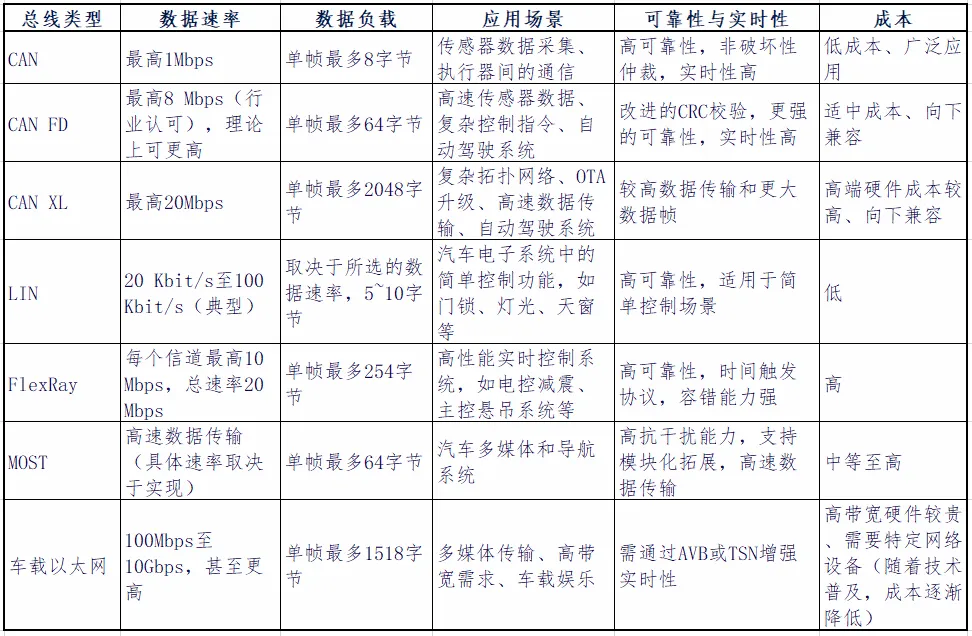
带宽与速率:从CAN到CAN FD再到CAN XL,带宽和数据传输速率逐渐增加。LIN的传输速率较低,适用于对性能要求不高的应用。FlexRay和Ethernet则提供更高的带宽和低延迟通信。
成本与应用:CAN和LIN因其低成本和简单性而广受欢迎,适用于各种汽车电子控制系统。Ethernet虽然成本较高,但因其高性能而逐渐在汽车领域得到应用。MOST则专注于汽车多媒体应用。
拓扑结构与节点数:这些协议在拓扑结构和支持的节点数上也有所不同。例如,CAN和LIN通常采用总线拓扑结构,而Ethernet则采用星型或网状拓扑结构。
总结
综上所述,这些通信协议各有其独特的特点和应用场景。在选择适合的协议时,需要根据具体的应用需求、系统性能和成本等因素进行综合考虑。
| 







