|
一:前言
接着前面的终端控制台分析,接下来分析serial的驱动。在linux中,serial也对应着终端,通常被称为串口终端。在shell上,我们看到的/dev/ttyS*就是串口终端所对应的设备节点。
在分析具体的serial驱动之前。有必要先分析uart驱动架构。uart是Universal
Asynchronous Receiver and Transmitter的缩写。翻译成中文即为”通用异步收发器”。它是串口设备驱动的封装层。
二:uart驱动架构概貌
如下图所示:
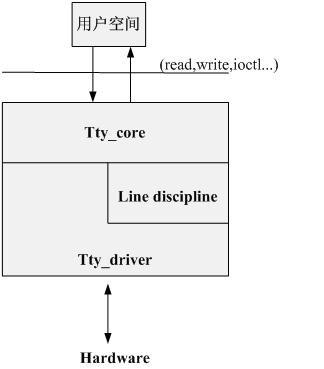
上图中红色部份标识即为uart部份的操作。
从上图可以看到,uart设备是继tty_driver的又一层封装。实际上uart_driver就是对应tty_driver.在它的操作函数中,将操作转入uart_port.
在写操作的时候,先将数据放入一个叫做circ_buf的环形缓存区。然后uart_port从缓存区中取数据,将其写入到串口设备中。
当uart_port从serial设备接收到数据时,会将设备放入对应line
discipline的缓存区中。
这样。用户在编写串口驱动的时候,只先要注册一个uart_driver.它的主要作用是定义设备节点号。然后将对设备的各项操作封装在uart_port.驱动工程师没必要关心上层的流程,只需按硬件规范将uart_port中的接口函数完成就可以了。
三:uart驱动中重要的数据结构及其关联
我们可以自己考虑下,基于上面的架构代码应该要怎么写。首先考虑以下几点:
1: 一个uart_driver通常会注册一段设备号。即在用户空间会看到uart_driver对应有多个设备节点。例如:
/dev/ttyS0 /dev/ttyS1
每个设备节点是对应一个具体硬件的,从上面的架构来看,每个设备文件应该对应一个uart_port.
也就是说:uart_device怎么同多个uart_port关系起来?怎么去区分操作的是哪一个设备文件?
2:每个uart_port对应一个circ_buf,所以uart_port必须要和这个缓存区关系起来
回忆tty驱动架构中。tty_driver有一个叫成员指向一个数组,即tty->ttys.每个设备文件对应设数组中的一项。而这个数组所代码的数据结构为tty_struct.
相应的tty_struct会将tty_driver和ldisc关联起来。
那在uart驱动中,是否也可用相同的方式来处理呢?
将uart驱动常用的数据结构表示如下:

结合上面提出的疑问。可以很清楚的看懂这些结构的设计。
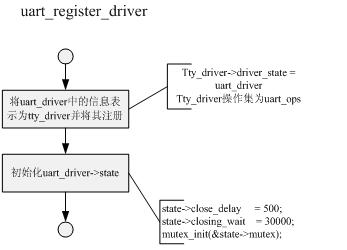
四:uart_driver的注册操作
Uart_driver注册对应的函数为: uart_register_driver()代码如下:
int uart_register_driver(struct uart_driver *drv)
{
struct tty_driver *normal = NULL;
int i, retval;
BUG_ON(drv->state);
/*
* Maybe we should be using a slab cache for this, especially if
* we have a large number of ports to handle.
*/
drv->state = kzalloc(sizeof(struct uart_state) * drv->nr, GFP_KERNEL);
retval = -ENOMEM;
if (!drv->state)
goto out;
normal = alloc_tty_driver(drv->nr);
if (!normal)
goto out;
drv->tty_driver = normal;
normal->owner = drv->owner;
normal->driver_name = drv->driver_name;
normal->name = drv->dev_name;
normal->major = drv->major;
normal->minor_start = drv->minor;
normal->type = TTY_DRIVER_TYPE_SERIAL;
normal->subtype = SERIAL_TYPE_NORMAL;
normal->init_termios = tty_std_termios;
normal->init_termios.c_cflag = B9600 | CS8 | CREAD | HUPCL | CLOCAL;
normal->init_termios.c_ispeed = normal->init_termios.c_ospeed = 9600;
normal->flags = TTY_DRIVER_REAL_RAW | TTY_DRIVER_DYNAMIC_DEV;
normal->driver_state = drv;
tty_set_operations(normal, &uart_ops);
/*
* Initialise the UART state(s)。
*/
for (i = 0; i < drv->nr; i++) {
struct uart_state *state = drv->state + i;
state->close_delay = 500; /* .5 seconds */
state->closing_wait = 30000; /* 30 seconds */
mutex_init(&state->mutex);
}
retval = tty_register_driver(normal);
out:
if (retval < 0) {
put_tty_driver(normal);
kfree(drv->state);
}
return retval;
} |
从上面代码可以看出。uart_driver中很多数据结构其实就是tty_driver中的。将数据转换为tty_driver之后,注册tty_driver.然后初始化uart_driver->state的存储空间。
这样,就会注册uart_driver->nr个设备节点。主设备号为uart_driver->
major. 开始的次设备号为uart_driver-> minor.
值得注意的是。在这里将tty_driver的操作集统一设为了uart_ops.其次,在tty_driver->
driver_state保存了这个uart_driver.这样做是为了在用户空间对设备文件的操作时,很容易转到对应的uart_driver.
另外:tty_driver的flags成员值为: TTY_DRIVER_REAL_RAW
| TTY_DRIVER_DYNAMIC_DEV.里面包含有TTY_DRIVER_DYNAMIC_DEV标志。结合之前对tty的分析。如果包含有这个标志,是不会在初始化的时候去注册device.也就是说在/dev/下没有动态生成结点(如果是/dev下静态创建了这个结点就另当别论了^_^)。
流程图如下:
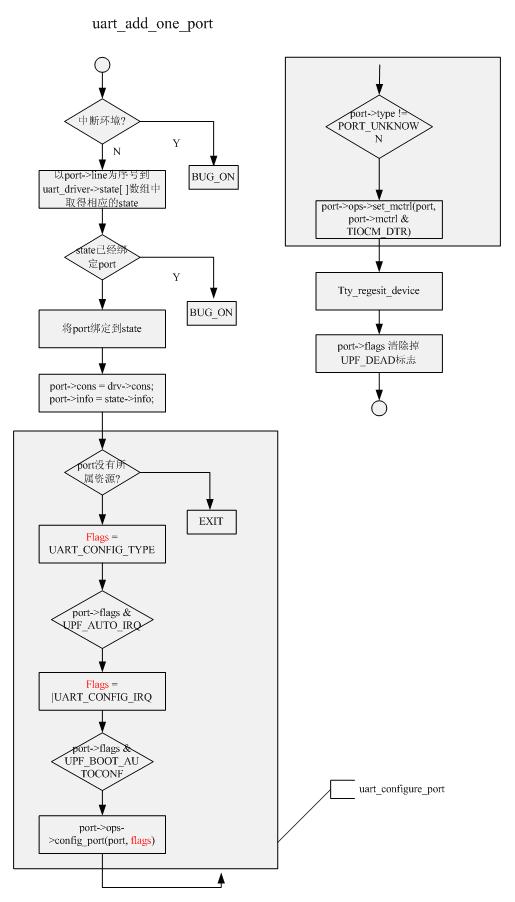
五: uart_add_one_port()操作
在前面提到。在对uart设备文件过程中。会将操作转换到对应的port上,这个port跟uart_driver是怎么关联起来的呢?这就是uart_add_ont_port()的主要工作了。
顾名思义,这个函数是在uart_driver增加一个port.代码如下:
int uart_add_one_port(struct uart_driver *drv, struct uart_port *port)
{
struct uart_state *state;
int ret = 0;
struct device *tty_dev;
BUG_ON(in_interrupt());
if (port->line >= drv->nr)
return -EINVAL;
state = drv->state + port->line;
mutex_lock(&port_mutex);
mutex_lock(&state->mutex);
if (state->port) {
ret = -EINVAL;
goto out;
}
state->port = port;
state->pm_state = -1;
port->cons = drv->cons;
port->info = state->info;
/*
* If this port is a console, then the spinlock is already
* initialised.
*/
if (!(uart_console(port) && (port->cons->flags & CON_ENABLED))) {
spin_lock_init(&port->lock);
lockdep_set_class(&port->lock, &port_lock_key);
}
uart_configure_port(drv, state, port);
/*
* Register the port whether it's detected or not. This allows
* setserial to be used to alter this ports parameters.
*/
tty_dev = tty_register_device(drv->tty_driver, port->line, port->dev);
if (likely(!IS_ERR(tty_dev))) {
device_can_wakeup(tty_dev) = 1;
device_set_wakeup_enable(tty_dev, 0);
} else
printk(KERN_ERR "Cannot register tty device on line %d\n",
port->line);
/*
* Ensure UPF_DEAD is not set.
*/
port->flags &= ~UPF_DEAD;
out:
mutex_unlock(&state->mutex);
mutex_unlock(&port_mutex);
return ret;
} |
首先这个函数不能在中断环境中使用。 Uart_port->line就是对uart设备文件序号。它对应的也就是uart_driver->state数组中的uart_port->line项。
它主要初始化对应uart_driver->state项。接着调用uart_configure_port()进行port的自动配置。然后注册tty_device.如果用户空间运行了udev或者已经配置好了hotplug.就会在/dev下自动生成设备文件了。
操作流程图如下所示:
六:设备节点的open操作
在用户空间执行open操作的时候,就会执行uart_ops->open.
Uart_ops的定义如下:
static const struct tty_operations uart_ops = {
.open = uart_open,
.close = uart_close,
.write = uart_write,
.put_char = uart_put_char,
.flush_chars = uart_flush_chars,
.write_room = uart_write_room,
.chars_in_buffer= uart_chars_in_buffer,
.flush_buffer = uart_flush_buffer,
.ioctl = uart_ioctl,
.throttle = uart_throttle,
.unthrottle = uart_unthrottle,
.send_xchar = uart_send_xchar,
.set_termios = uart_set_termios,
.stop = uart_stop,
.start = uart_start,
.hangup = uart_hangup,
.break_ctl = uart_break_ctl,
.wait_until_sent= uart_wait_until_sent,
#ifdef CONFIG_PROC_FS
.read_proc = uart_read_proc,
#endif
.tiocmget = uart_tiocmget,
.tiocmset = uart_tiocmset,
}; |
对应open的操作接口为uart_open.代码如下:
static int uart_open(struct tty_struct *tty, struct file *filp)
{
struct uart_driver *drv = (struct uart_driver *)tty->driver->driver_state;
struct uart_state *state;
int retval, line = tty->index;
BUG_ON(!kernel_locked());
pr_debug("uart_open(%d) called\n", line);
/*
* tty->driver->num won't change, so we won't fail here with
* tty->driver_data set to something non-NULL (and therefore
* we won't get caught by uart_close())。
*/
retval = -ENODEV;
if (line >= tty->driver->num)
goto fail;
/*
* We take the semaphore inside uart_get to guarantee that we won't
* be re-entered while allocating the info structure, or while we
* request any IRQs that the driver may need. This also has the nice
* side-effect that it delays the action of uart_hangup, so we can
* guarantee that info->tty will always contain something reasonable.
*/
state = uart_get(drv, line);
if (IS_ERR(state)) {
retval = PTR_ERR(state);
goto fail;
}
/*
* Once we set tty->driver_data here, we are guaranteed that
* uart_close() will decrement the driver module use count.
* Any failures from here onwards should not touch the count.
*/
tty->driver_data = state;
tty->low_latency = (state->port->flags & UPF_LOW_LATENCY) ? 1 : 0;
tty->alt_speed = 0;
state->info->tty = tty;
/*
* If the port is in the middle of closing, bail out now.
*/
if (tty_hung_up_p(filp)) {
retval = -EAGAIN;
state->count--;
mutex_unlock(&state->mutex);
goto fail;
}
/*
* Make sure the device is in D0 state.
*/
if (state->count == 1)
uart_change_pm(state, 0);
/*
* Start up the serial port.
*/
retval = uart_startup(state, 0);
/*
* If we succeeded, wait until the port is ready.
*/
if (retval == 0)
retval = uart_block_til_ready(filp, state);
mutex_unlock(&state->mutex);
/*
* If this is the first open to succeed, adjust things to suit.
*/
if (retval == 0 && !(state->info->flags & UIF_NORMAL_ACTIVE)) {
state->info->flags |= UIF_NORMAL_ACTIVE;
uart_update_termios(state);
}
fail:
return retval;
}
int ret = 0;
state = drv->state + line;
if (mutex_lock_interruptible(&state->mutex)) {
ret = -ERESTARTSYS;
goto err;
}
state->count++;
if (!state->port || state->port->flags & UPF_DEAD) {
ret = -ENXIO;
goto err_unlock;
}
if (!state->info) {
state->info = kzalloc(sizeof(struct uart_info), GFP_KERNEL);
if (state->info) {
init_waitqueue_head(&state->info->open_wait);
init_waitqueue_head(&state->info->delta_msr_wait);
/*
* Link the info into the other structures.
*/
state->port->info = state->info;
tasklet_init(&state->info->tlet, uart_tasklet_action,
(unsigned long)state);
} else {
ret = -ENOMEM;
goto err_unlock;
}
}
return state;
err_unlock:
state->count--;
mutex_unlock(&state->mutex);
err:
return ERR_PTR(ret);
} |
从代码中可以看出。这里注要是操作是初始化state->info.注意port->info就是state->info的一个副本。即port直接通过port->info可以找到它要操作的缓存区。
uart_startup()代码如下:
static int uart_startup(struct uart_state *state, int init_hw)
{
struct uart_info *info = state->info;
struct uart_port *port = state->port;
unsigned long page;
int retval = 0;
if (info->flags & UIF_INITIALIZED)
return 0;
/*
* Set the TTY IO error marker - we will only clear this
* once we have successfully opened the port. Also set
* up the tty->alt_speed kludge
*/
set_bit(TTY_IO_ERROR, &info->tty->flags);
if (port->type == PORT_UNKNOWN)
return 0;
/*
* Initialise and allocate the transmit and temporary
* buffer.
*/
if (!info->xmit.buf) {
page = get_zeroed_page(GFP_KERNEL);
if (!page)
return -ENOMEM;
info->xmit.buf = (unsigned char *) page;
uart_circ_clear(&info->xmit);
}
retval = port->ops->startup(port);
if (retval == 0) {
if (init_hw) {
/*
* Initialise the hardware port settings.
*/
uart_change_speed(state, NULL);
/*
* Setup the RTS and DTR signals once the
* port is open and ready to respond.
*/
if (info->tty->termios->c_cflag & CBAUD)
uart_set_mctrl(port, TIOCM_RTS | TIOCM_DTR);
}
if (info->flags & UIF_CTS_FLOW) {
spin_lock_irq(&port->lock);
if (!(port->ops->get_mctrl(port) & TIOCM_CTS))
info->tty->hw_stopped = 1;
spin_unlock_irq(&port->lock);
}
info->flags |= UIF_INITIALIZED;
clear_bit(TTY_IO_ERROR, &info->tty->flags);
}
if (retval && capable(CAP_SYS_ADMIN))
retval = 0;
return retval;
} |
在这里,注要完成对环形缓冲,即info->xmit的初始化。然后调用port->ops->startup(
)将这个port带入到工作状态。其它的是一个可调参数的设置,就不详细讲解了。
七:设备节点的write操作
Write操作对应的操作接口为uart_write( )。代码如下:
static int
uart_write(struct tty_struct *tty, const unsigned char *buf, int count)
{
struct uart_state *state = tty->driver_data;
struct uart_port *port;
struct circ_buf *circ;
unsigned long flags;
int c, ret = 0;
/*
* This means you called this function _after_ the port was
* closed. No cookie for you.
*/
if (!state || !state->info) {
WARN_ON(1);
return -EL3HLT;
}
port = state->port;
circ = &state->info->xmit;
if (!circ->buf)
return 0;
spin_lock_irqsave(&port->lock, flags);
while (1) {
c = CIRC_SPACE_TO_END(circ->head, circ->tail, UART_XMIT_SIZE);
if (count < c)
c = count;
if (c <= 0)
break;
memcpy(circ->buf + circ->head, buf, c);
circ->head = (circ->head + c) & (UART_XMIT_SIZE - 1);
buf += c;
count -= c;
ret += c;
}
spin_unlock_irqrestore(&port->lock, flags);
uart_start(tty);
return ret;
} |
Uart_start()代码如下:
static void uart_start(struct tty_struct *tty)
{
struct uart_state *state = tty->driver_data;
struct uart_port *port = state->port;
unsigned long flags;
spin_lock_irqsave(&port->lock, flags);
__uart_start(tty);
spin_unlock_irqrestore(&port->lock, flags);
}
static void __uart_start(struct tty_struct *tty)
{
struct uart_state *state = tty->driver_data;
struct uart_port *port = state->port;
if (!uart_circ_empty(&state->info->xmit) && state->info->xmit.buf &&
!tty->stopped && !tty->hw_stopped)
port->ops->start_tx(port);
} |
显然,对于write操作而言,它就是将数据copy到环形缓存区。然后调用port->ops->start_tx()将数据写到硬件寄存器。
八:Read操作
Uart的read操作同Tty的read操作相同,即都是调用ldsic->read()读取read_buf中的内容。有对这部份内容不太清楚的,参阅《
linux设备模型之tty驱动架构》.
九:小结
本小节是分析serial驱动的基础。在理解了tty驱动架构之后,再来理解uart驱动架构应该不是很难。随着我们在linux设备驱动分析的深入,越来越深刻的体会到,linux的设备驱动架构很多都是相通的。只要深刻理解了一种驱动架构。举一反三。也就很容易分析出其它架构的驱动了。 |