| ±ύΦ≠ΆΤΦω: |
ΫώΧλΒΡΈΡ’¬ «ΙΊ”ΎΉν÷Ί“ΣΒΡ≥Β‘ΊΉήœΏ-CAN
BUS Θ§ ÷ς“ΣΫι…ήΓΔCAN ΉήœΏ « ≤Ο¥Θ§CANΒΡΉς”Ο“‘ΦΑ”≈ΒψΘ§ΉνΚσΫι…ήΝΥΜυ±ΨΒΡ
CAN ΉήœΏΒγ¬ΖΘ§œΘΆϊΕ‘ΡζΒΡ―ßœΑ”–ΥυΑο÷ζΓΘ
±ΨΈΡά¥Ή‘”Ύ”κΖ«ΆχΘ§”…ΜπΝζΙϊ»μΦΰAlice±ύΦ≠ΓΔΆΤΦωΓΘ |
|
“ΜΓΔCAN ΉήœΏ « ≤Ο¥ΘΩ
CAN « Controller Area Network ΒΡΦρ≥ΤΘ§ «“Μ÷÷”––ß÷ß≥÷Ζ÷≤Φ ΫΩΊ÷ΤΜρ Β ±ΩΊ÷ΤΒΡ¥°––Ά®–≈Άχ¬γΘ§Ήν‘γ «”…“‘―–ΖΔΚΆ…ζ≤ζΤϊ≥ΒΒγΉ”≤ζΤΖ÷χ≥ΤΒΡΒ¬Ιζ
BOSCH ΙΪΥΨΩΣΖΔΒΡΘ§1986 ΡξΘ§BOSCH ΩΣΖΔ≥ωΟφœρΤϊ≥ΒΒΡ CAN Ά®–≈–≠“ιΘ§Κσά¥Θ§CAN
ΉήœΏΆ®Ιΐ ISO 11898 ΚΆ ISO 11595 Ϋχ––ΝΥ±ξΉΦΜ·Θ§œ÷‘Ύ‘Ύ≈Ζ÷ό «Τϊ≥ΒΆχ¬γΒΡ±ξΉΦ–≠“ιΓΘ
Α―Τϊ≥Β±»»γ≥…»ΥΧεΘ§Ρ« CAN ΉήœΏΨΆ «…ώΨ≠œΒΆ≥Θ§ΒγΉ”ΩΊ÷ΤΒΞ‘ΣΘ®ECUΘ©ΨΆ «…μΧεΒΡ“Μ≤ΩΖ÷Θ§…μΧε «”…ΕύΗω
ECU Ήι≥…ΒΡΘ§ΗςΗω ECU ÷°ΦδΆ®Ιΐ…ώΨ≠œΒΆ≥Ϋχ––Ά®–≈Θ§“ΜΗω≤ΩΖ÷Η–÷ΣΒΫΒΡ–≈œΔΩ…“‘”κΝμ“Μ≤ΩΖ÷Ι≤œμΓΘ
CAN ΒΡ”Π”ΟΖ«≥ΘΙψΖΚΘ§ΙΛ“ΒΉ‘Ε·Μ·ΓΔ¥§≤ΑΓΔ“ΫΝΤ…η±ΗΓΔΙΛ“Β…η±ΗΒ»ΖΫΟφΓΘ
ΕΰΓΔCAN ΉήœΏΒΡΉς”ΟΘΩ
‘ΎΤϊ≥Β…œΘ§CAN ΉήœΏΒΡΉς”ΟΨΆ «Α―≤ΜΆ§ΒΡ≤ΩΦΰΝ§Ϋ”Τπά¥Θ§»ΜΚσ’β–©≤ΩΦΰΕΦ÷¥––Ά§“ΜΧΉ±ξΉΦ–≠“ιΘ§’β―υΒΡΚΟ¥Π «Φφ»ί–‘ΗΏΘ§–≈œΔΩ…“‘Ω…ΩΩΙ≤œμΘ§≤Δ«“ΡήΦθ…Ό’ϊ≥ΒΒΡœΏ χ ΐΝΩΓΘ

ΫΎΒψΩ…“‘Ι“ΚήΕύ≤ΩΦΰ
»ΐΓΔCAN ΉήœΏΒΡ”≈Βψ
1. ΦρΒΞΒΆ≥…±ΨΘΚECU Ά®ΙΐΒΞΗω CAN œΒΆ≥Ϋχ––Ά®–≈Θ§Εχ≤Μ «÷±Ϋ”ΒΡΗ¥‘”ΡΘΡβ–≈Κ≈œΏΆ®–≈Θ§’β―υΦθ…ΌΝΥ¥μΈσΘ§÷ΊΝΩΘ§Ϋ”œΏΚΆ≥…±ΨΓΘ
2. Άξ»ΪΦ·÷–ΘΚCAN ΉήœΏΧαΙ©ΝΥ“ΜΗωΫ”»κΒψΘ§Ω…“‘”κΥυ”–Άχ¬γ ECU
Ϋχ––Ά®–≈Θ§ΓΣΓΣ÷ß≥÷Φ·÷–’οΕœΘ§ ΐΨίΦ«¬ΦΚΆ≈δ÷ΟΓΘ
3. Έ»Ε®ΘΚCAN ΉήœΏΨΏ”–«Ω¥σΒΡΩΙΒγΗ…»≈ΚΆΩΙΒγ¥≈Η…»≈ΡήΝΠΘ§Ζ«≥Θ ΚœΕ‘Α≤»Ϊ“Σ«σ―œΗώΒΡ”Π”ΟΘ®άΐ»γ≥ΒΝΨΘ©ΓΘ
4. ΗΏ–ßΘΚΆ®Ιΐ ID Ε‘ CAN ÷ΓΫχ––”≈œ»ΦΕ≈≈–ρΘ§“‘±ψ”≈œ»ΦΕΉνΗΏΒΡ ΐΨίΩ…“‘ΝΔΦ¥ΖΟΈ ΉήœΏΘ§Εχ≤ΜΜα“ΐΤπΤδΥϊ÷ΓΒΡ÷–ΕœΓΘ
ΥΡΓΔCAN ΉήœΏΒΡάζ Ζ
CAN ΉήœΏΖΔ’ΙΚήΕύΡξΝΥΓΘ
CAN ÷°«ΑΑφ±ΨΘΚΤϊ≥Β ECU «Η¥‘”ΒψΕ‘Βψ≤ΦœΏΓΘ
1986 ΡξΘΚ≤© άΩΣΖΔΝΥ CAN –≠“ιΉςΈΣΫβΨωΖΫΑΗΓΘ
1993 ΡξΘΚCAN ±Μ≤…”ΟΈΣΙάΦΤ±ξΉΦΘ®ISO 11898Θ©
2003 ΡξΘΚISO 11898 ≥ΤΈΣ±ξΉΦœΒΝ–ΓΘ
2012 ΡξΘΚ≤© άΖΔ≤ΦΝΥ CAN FD 1.0
2015 ΡξΘΚCAN FD –≠“ι±ξΉΦΜ·Θ®ISO 11898-1Θ©
2016 ΡξΘΚCAN Έοάμ≤ψΘ§ ΐΨίΥΌ¬ ΗΏ¥ο 5Mbit/sΘ§“―Ά®Ιΐ
ISO 11898-2 ±ξΉΦΜ·ΓΘ
»γΫώΘ§CAN BUS “―≥…ΈΣΤϊ≥ΒΓΔΩ®≥ΒΓΔΙΪΙ≤Τϊ≥ΒΓΔΆœά≠ΜζΓΔ¬÷¥§ΓΔΖ…ΜζΒ»ΒΡ±ξΉΦ≈δ÷ΟΓΘ
ΈεΓΔCAN ΉήœΏΆΊΤΥΆΦ
¥”ΆΊΤΥΆΦ÷–Ω…“‘Ω¥ΒΫ“ΜΗω CAN ΫΎΒψΘ§÷ς“Σ”… CPUΘ§CAN ΩΊ÷ΤΤςΘ§CAN ’ΖΔΤςΉι≥…ΓΘ

CAN ΉήœΏΆΊΤΥ
1. œ‘–‘ΚΆ“ΰ–‘
CAN ΉήœΏ «≤νΖ÷œΏΘ§”– CAN_H ΚΆ CAN_L ΝΫΗυœΏΘ§≤νΖ÷œΏΒΡΩΙΗ…»≈ΡήΝΠ«ΩΘ§ΆβΫγ”–Η…»≈ ±Θ§ΦΗΚθΆ§ ±ΜαώνΚœΒΫ≤νΖ÷œΏΒΡΝΫΗυœΏ…œΘ§ΕχΫ” ’ΕΥΙΊ–ΡΒΡ÷Μ «ΝΫ–≈Κ≈ΒΡ≤ν÷ΒΘ§Υυ“‘ΆβΫγΒΡΙ≤ΡΘ‘κ…υΩ…“‘±ΜΆξ»ΪΒ÷œϊΘ§ΆΦ÷–ΦΐΆΖΥυ ΨΘ§Υδ»ΜΝΫΗυœΏΕΦ ήΒΫΗ…»≈Θ§ΒΪ «ΝΫ’Ώ≤ν÷Β≤Μ±δΓΘ
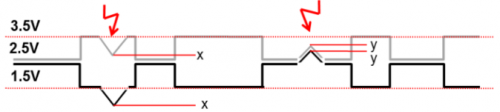
CAN ’ΖΔΤςΗυΨί CAN_H ΚΆ CAN_L ΒΡ≤ν÷Βά¥≈–ΕœΉήœΏΒγΤΫΘ§ΉήœΏΒγΤΫ”–ΝΫ÷÷Θ§œ‘–‘ΒγΤΫΚΆ“ΰ–‘ΒγΤΫΘ§CAN2.0A/B
ΙφΕ®ΒΡΉήœΏ value »γœ¬ΘΚ

”–»ΥΜαΥΒΘ§ΈΣ ≤Ο¥œ‘–‘ΒγΤΫ «¬ΏΦ≠ 0Θ§ «“ρΈΣ CAN ΉήœΏ≤…”ΟΒΡ"œΏ”κ"ΒΡΙφ‘ρΫχ––ΉήœΏ≥ε≤ΟΘ§‘Ύ
CAN2.0 …œΙφΕ®ΝΥΉήœΏ…œΆ§ ±¥Ϊ δœ‘–‘ΚΆ“ΰ–ΈΒγΤΫ ±Θ§ΉήœΏ «œ‘–‘Θ§Φ¥ 1&0=0Θ§Υυ“‘ 0
ΈΣœ‘–‘ΓΘ

¥”œ¬ΆΦΩ…“‘Ω¥ΒΫΘ§ISO11898 ΒΡΒγΤΫΚΆ ISO11519 «≤Μ“Μ―υΒΡΘ§œ÷‘Ύ¥σΕύ ΐΕΦ «ΚΆ ISO11898
“Μ―υΒΡΓΘœ¬Οφ «ΝΫΗωœ‘“ΰ–‘ΒγΤΫΒΡ«χ±π±»ΫœΘ§Ά§ ±Ηχ≥ωΝΥΉν¥σΉν–Γ÷ΒΓΘ

ΝΫ÷÷±ξΉΦ CAN ΉήœΏΒγΤΫ«χ±π
2. CAN ’ΖΔΤςΒΡΉς”Ο
ΙΥΟϊΥΦ“εΘ§ ’ΖΔΤςΦ»Ω…“‘ ’Θ§“≤Ω…“‘ΖΔΘ§ ’ «Ϋ” ’ CAN ΉήœΏ…œΒΡ≤νΖ÷ ΐΨίΘ§ΫΪ ΐΨίΉΣΜΜΈΣ TTL ΒγΤΫΘ§ΖΔΥΆΗχΩΊ÷ΤΤςΘΜΖΔ «ΫΪ
CAN ΩΊ÷ΤΤςΒΡ TTL ΒγΤΫ–≈Κ≈ΉΣΜΜΈΣ≤νΖ÷–≈Κ≈Ϋχ––ΉήœΏ ΐΨί¥Ϊ δΓΘ

3. CAN ΩΊ÷ΤΤςΒΡΉς”Ο
CAN ΩΊ÷ΤΤς“ΜΖΫΟφΫ” ’ ’ΖΔΤςΒΡ ΐΨίΘ§Ϋχ––ΫβΈωΚσΖΔΥΆΗχ CPUΘΜΝμ“ΜΖΫΟφΫ” ’ CPU ΒΡ÷ΗΝν ΐΨίΘ§»ΜΚσΖΔΥΆΗχ
CAN ’ΖΔΤςΓΘ
4. 120ΠΗ÷’ΕΥΒγΉη
ΗΏΤΒ–≈Κ≈¥Ϊ δ ±Θ§–≈Κ≈≤®≥ΛœύΕ‘¥Ϊ δœΏΫœΕΧΘ§–≈Κ≈‘Ύ¥Ϊ δœΏ÷’ΕΥΜα–Έ≥…Ζ¥…δ≤®Θ§Η…»≈‘≠–≈Κ≈Θ§Υυ“‘–η“Σ‘Ύ¥Ϊ δœΏΡ©ΕΥΦ”÷’ΕΥΒγΉηΘ§ Ι–≈Κ≈ΒΫ¥ο¥Ϊ δœΏΡ©ΕΥΚσ≤ΜΖ¥…δΓΘ
Ε‘”ΎΒΆΤΒ–≈Κ≈‘ρ≤Μ”Ο CAN ΉήœΏΝΫΕΥ±Ί–κΝ§Ϋ”÷’ΕΥΒγΉη≤≈Ω…“‘’ΐ≥ΘΙΛΉςΘ§÷’ΕΥΒγΉη”ΠΗΟ”κΆ®―ΕΒγά¬ΒΡΉηΩΙœύΆ§Θ§Βδ–Ά÷ΒΈΣ
120 ≈ΖΡΖΘ§ΤδΉς”Ο «ΤΞ≈δΉήœΏΉηΩΙΘ§ΧαΗΏ ΐΨίΆ®–≈ΒΡΩΙΗ…»≈–‘ΦΑΩ…ΩΩ––ΓΘ

÷’ΕΥΒγΉη≤Δ≤ΜΕΦ « 120ΠΗΘ§“‘œ¬ « ISO 11898 –≠“ιΒΡΆΤΦω÷ΒΓΘ

÷’ΕΥΒγΉη»Γ÷Β
ΥΡΓΔΜυ±ΨΒΡ CAN ΉήœΏΒγ¬Ζ
»γœ¬ΨΆ « CAN BUS ΒΡΜυ±ΨΒγ¬ΖΘ§“ρΈΣ“ΜΑψΫΎΒψΕΦ «ΚΆ OBD Ϋ”ΩΎœύΝ§ΒΡΘ§ESD ±ΘΜΛΖ«≥Θ÷Ί“ΣΘ§Νμ“ΜΖΫΟφ
120ΠΗ≤Δ≤Μ «»ΈΚΈ ±ΚρΕΦ–η“ΣΘ§Υυ“‘Βγ¬Ζ…ηΦΤ ±Φ”“ΜΗω JP1 ΧχΫ”Ο±±»ΫœΚΟΓΘ

±Ί“Σ ±–η“Σ‘Ύ CAN_H ΚΆ CAN_L ‘ΛΝτ RC EMI filtersΘ§”Οά¥Έϋ ’ EMIΓΘ

CAN ΉήœΏ…œ‘ΛΝτ RC Έϋ ’ EMI
ΫώΧλΒΡΈΡ’¬ΒΫ’βάοΨΆΫα χΝΥΓΘΓΘΓΘ
|





