| 编辑推荐: |
本文主要介绍了场景导向的雷达系统模型设计与仿真方法研究等相关内容。望对您有所帮助。
本文来源于微信公众号车端软件开发,由火龙果软件Linda编辑,推荐。 |
|
摘要:由于雷达系统工作过程、接口交互目前主要采用文本的形式进行描述,导致了系统的整体验证过度依赖实物,因而带来了验证周期长、设计修正成本高等问题。针对研制过程中存在的问题,采用MBSE思想,开展了以雷达场景为导向的需求分析,并根据雷达系统功能成熟度、复杂度等特点,详细阐述了适用于不同雷达的功能分析方法,重点介绍了雷达系统与分系统的架构设计和三层仿真验证方法,将系统调试阶段的部分验证环节提前到系统设计初期,解决了过度依赖实物的痛点问题,对雷达系统新研制模式的应用具有积极的意义。
雷达系统设计是一个复杂系统工程,设计过程有概念设计、方案技术设计、工程研制以及设计定型等阶段,设计类型涵盖了功能、架构、软件等模型的设计与仿真。当前雷达系统的研制周期要求明显加快,为满足未来复杂战场环境不断变化的对抗形势,系统功能必须能够快速升级,以便在攻防对抗中获得先机。传统雷达系统研制过程中,各专业领域利用数字模型仿真手段对设计进行了验证,但对雷达系统整体而言,系统工作过程的描述依然采用文本的描述方式,彼此的衔接主要依靠设计师之间的沟通,导致了系统的技术状态无法保证、验证过度依赖实物、设计修正成本高等问题。基于模型的系统工程(model-based
systems engineering ,MBSE)[1]的高效研发思路旨在系统设计阶段通过可执行的动态视图模型,对系统运行逻辑、接口设计、性能指标设计的合理性和一致性进行早期验证,快速形成可行、可靠的系统总体论证方案,确保系统顶层设计的正确性,避免了研制过程中的反复设计,显著压缩了复杂系统的研制周期。
目前,国内外航空航天、车辆、船舶等复杂产品制造领域都在积极探索和应用MBSE 技术进行产品的研发, 国际系统工程学会(InternationalCouncil
on Systems Engineering,INCOSE)与美国国家基金会(The National
Endowment for Democracy,NED)合作开展“曙光探测器号”立方体卫星的论证、设计与研制,提出了一种通过状态机图驱动的、需求-行为-结构-参数联合运行的任务分析模型,并且集成了部分轨道设计模型(Satellite
Tool Kit,STK)以及专业计算模型(Simulink)极大提高了系统先期验证能力[2]。张玉金等[3]提出了一种面向运行场景的商用航空发动机MBSE
设计方法,从全生命周期运行场景出发,进行需求捕获、功能分析、逻辑架构定义和物理设计的完整MBSE 过程,梅芊等[4]在黑盒功能架构的基础上,通过对黑盒进行解白,实现民用飞机级需求的系统功能白盒架构的正向设计过程,但缺乏与其他仿真软件集成和联合仿真的过程。高金艳等[5]以火星维护与管理装置为研究对象,通过对航天器进行整星级参数约束分析,实现系统指标在系统层级的追溯性验证,但缺少系统指标及其关联指标的影响域分析。INCOSE、美国国家航天航空局(National
Aeronautics andSpace Administration,NASA)等机构发表的系统工程手册,以及近年来INCOSE、对象管理组织(Object
Management Group,OMG)等国际协会发表的文章[6-10]中,仅孤立提出定量指标的层次类型划分概念,仍未提出指标需求的产生方法和建模过程,仅见到国内体系工程学者在开展装备体系级需求分析时,提出了以功能需求出发建立性能指标的思想。
近年来,MBSE 的应用逐步地延伸到复杂电子系统装备领域,由于雷达系统是偏重于电性能指标类的军事武器装备,与航空航天等偏于机械动力学的特点差别较大[11],因此可以参考借鉴的实例较少。为积极推动MBSE
在复杂电子装备中的实施落地,本文结合其他领域系统工程研究的经验和不足,开展了以雷达运行场景为导向的需求分析。并根据雷达系统功能成熟度、复杂度等特点,详细阐述了适用于不同雷达的功能分析方法,提高了需求的清晰度和完整性。重点介绍了雷达系统与分系统的架构设计模型,并基于此开展了系统-分系统黑盒仿真、系统-分系统白盒仿真、系统级-分系统专业联合仿真3
个层级的仿真验证,将系统调试阶段的工作过程验证、接口验证和指标分解验证等环节提前到系统设计阶段。
1 雷达系统设计与仿真总体架构
基于MBSE 的雷达系统设计与仿真总体架构是在雷达现有研制流程基础上,采用模型驱动的方式加强雷达需求分析、架构设计与仿真验证,替代原有基于文档的静态系统需求分析与设计,总体架构框图如图1
所示。
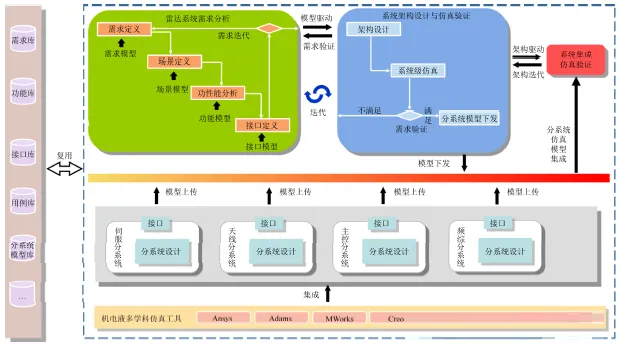
图1 基于MBSE 的雷达系统设计与仿真总体架构
总体架构以上级需求为导入,基于模型开展以场景为导向的雷达系统需求分析,完成雷达功能需求的分解、细化、衍生,建立需求模型、场景模型、功能模型和接口模型。通过需求的分配来开展系统架构分析与设计,构建雷达系统及其各组成部分的接口交互关系,并搭建各分系统的黑盒模型,以验证雷达系统功能需求、工作过程以及各分系统的接口需求,从而进一步验证系统的架构是否满足雷达顶层功能需求,在需求分析与架构设计间进行不断迭代,形成并下发分系统的任务需求。
各分系统基于任务模型开展分系统的设计,搭建需求模型、架构模型、仿真模型等,形成分系统的白盒模型,并基于此验证分系统架构模型是否满足分系统任务需求。
在雷达系统架构模型的基础上,利用分系统设计模型替代系统下发的任务模型,开展系统与分系统的联合仿真分析,验证系统工作过程设计、各分系统架构设计是否满足雷达系统需求。各分系统接口设计是否协调一致,将以往系统联调阶段的部分验证环节提前到系统设计阶段,有助于系统设计初期发现缺陷,避免了“设计-制造-试验-修改设计-再试验”串行研发模式的反复迭代。另外,通过对已有型号的模型搭建形成雷达模型重用库,新研制型号可通过大量复用雷达的需求模型、架构模型、接口模型等,缩短研制周期,降低研制成本。
2 模型驱动下的系统需求分析
2.1 场景导向的需求分析
从顶层设计需求及任务场景设计入手,以场景为导向开展雷达系统需求分析,通过场景模型与利益攸关者沟通,挖掘用户需求的同时,加强需求理解的一致性。场景模型需要从利益攸关者、系统运行时序、系统状态等角度开展梳理与设计。以雷达为例,基于上级的任务书,工作过程等顶层输入,以雷达使用角度形成雷达作战、运输等场景。通过描述每个场景下,雷达在哪一时刻与哪个外界系统进行交互以及交互的内容来定义场景,并与利益攸关者进行沟通,明确利益攸关者需求,雷达运行场景模型如图2
所示。
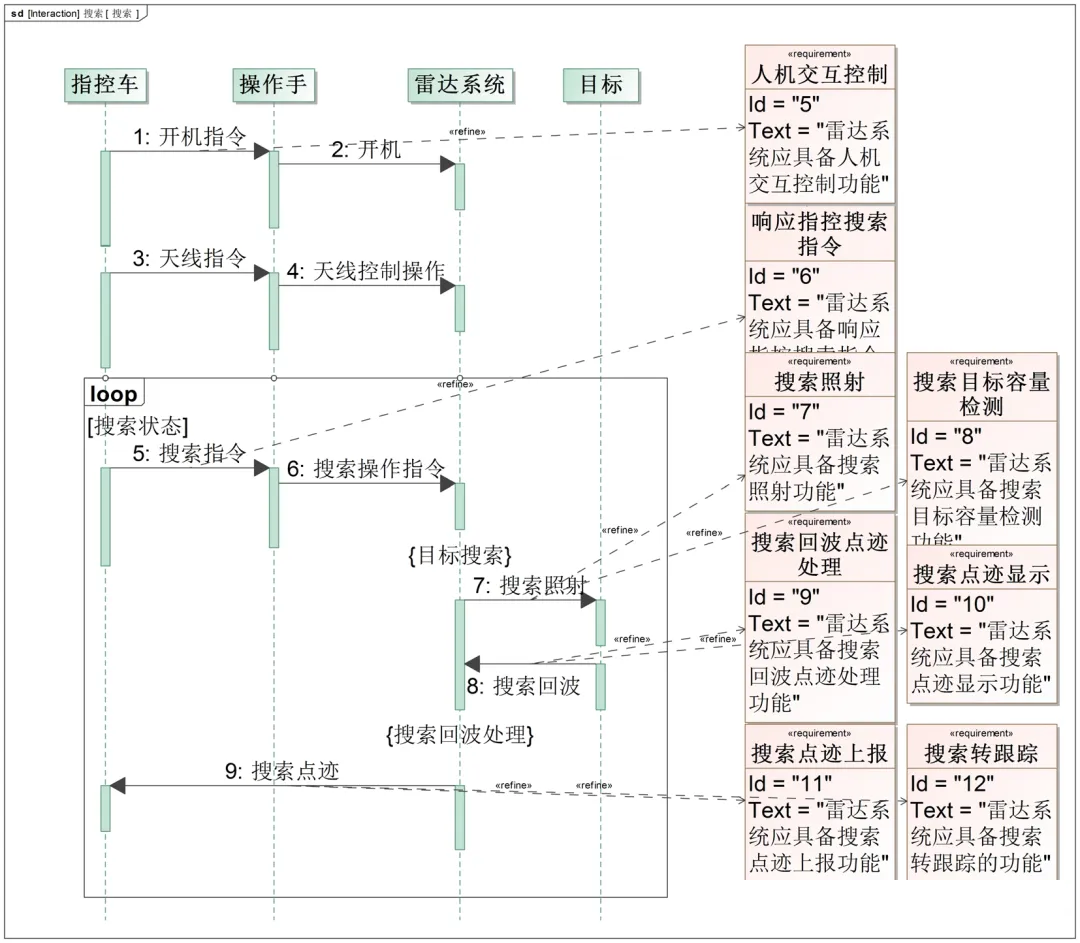
图2 雷达运行场景模型
2.2 功能分析实践方法
场景导向的需求分析是以利益攸关者的角度描述利益攸关者对雷达的需求,系统的功能分析主要是以雷达系统视角来分析描述雷达为了完成利益攸关者的需求,雷达所应具备的功能以及达到的性能等。雷达功能分析是基于雷达用例的。目前用例的分析主要包括3
种途经[12]:始于用例功能流的定义、始于用例场景的定义及用例状态图的定义。
在实际应用中,切勿生搬硬套国内外经典的建模流程,需结合系统特点以及系统人员的建模能力开展功能分析。本文针对雷达系统功能成熟度、复杂度等特点采用了不同的功能分析方法:
1) 始于用例功能流的定义。这种方法目前应用比较成熟,工具支持较好,但该流程一开始就要求将各种离散的功能组织进行合并以描述用例的主要功能流。这对于成熟度不高系统、经验不足的系统人员很难给出相对完整系统用例的功能流。该方法较适用于系统人员对用例的功能流比较熟悉,可以描述出系统连续行为。如搜索功能在雷达研制中较成熟,系统人员易描述出搜索连续行为,而且借助建模工具很方便地开展系统的功能分析。
2) 始于用例场景的定义。该方法更有利于从系统运用场景出发,捕获各种场景的系统功能。其需要分析大量的需求场景,再进行功能整合。该方法较适用于用例功能与场景有较大的相关度,但对于成熟度较高的系统功能用例无需采用此方法。如雷达抗干扰功能需求依赖于雷达在复杂场景下可能遭受的干扰情况,由于不同雷达面临的环境不同,所遭受的干扰情况也不同,抗干扰的需求也不同。这时的用例分析直接采用始于功能流,系统设计人员很难直接描述出抗干扰的功能活动,所以此用例采用始于用例场景分析的途经来分析。
3) 始于用例状态图的定义。实际上状态图中包括了始于用例功能流和用例场景分析所获得大部分信息,包括功能流程、功能点时序关系、接口关系及状态切换条件等。较适合系统设计人员对系统很熟悉且建模能力较强,可以用状态图描述整个系统的行为,或用例功能与状态相关。如雷达系统准备功能,系统准备包括雷达工作状态设置、各状态的初始化、参数装订等功能。该用例明显基于状态,且利用状态迁移直接表述各状态切换的条件。
3 模型驱动下的系统设计与仿真
用例功能的逐层分析、分解形成细化需求,通过对需求的归类,划分泳道,将相似功能合并组合。结合系统组成及工程经验,经过迭代,建立雷达的架构设计。初步定义分系统来承接相应的功能需求,形成初步分系统任务模型。
3.1 基于模型的系统架构设计
基于模型的架构设计主要包括:采用块图完成系统的组成模型,内部块图需完成系统各组成部分之间的交互信息;采用状态机、活动图完成系统工作过程设计,参数图调用算法模型完成系统技术指标设计。
目前多方案权衡设计方法,未考虑成本、进度和技术成熟度等因素,但系统总体人员可借助此方法将复杂、繁琐的多方案技术指标权衡工作交给建模工具进行运算分析,可大大提升复杂系统的研发效率。基于模型开展系统技术指标设计,应建立完整的指标体系模型,描述任务指标-系统指标-分系统指标间的关联关系。当某个指标发生调整时,与其关联的指标同步进行调整,保证方案中的指标传递。雷达系统典型指标多层级关联关系如图3
所示。
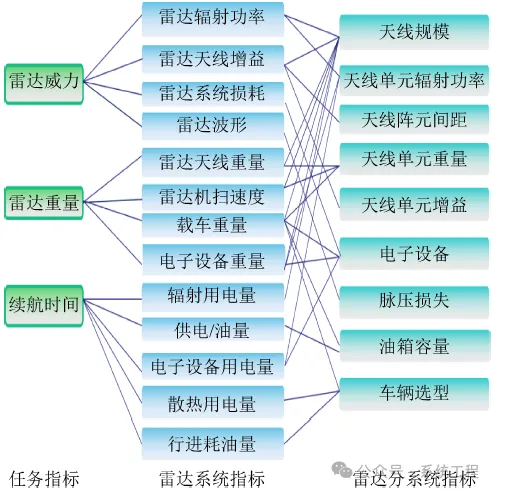
图3 典型系统指标多层级关联关系
以任务指标雷达探测威力为例,分解探测威力这一任务指标至雷达系统,得到辐射功率、天线增益、系统损耗以及雷达波形等系统指标。由于雷达系统由天线、信号处理、车辆、伺服等分系统组成,可进一步将雷达系统指标分配至天线分系统,形成天线规模、天线单元辐射功率、天线阵元间距等天线分系统指标;分配至车辆分系统,形成油箱容量、车辆选型等车辆分系统指标要求,并建立参数模型。根据专业能力各指标通过选取不同参数,形成多种不同方案。
为快速评估系统方案是否满足系统要求和约束条件,可建立方案合理性评估模块,将系统方案关注的探测威力、重量以及续航时间等边界条件作为合理性评估的重要判据。最终输出各方案的合理性评分,选取方案合理性最高分的方案作为设计最终方案,辅助系统设计师快速完成方案评估和权衡。图4
为系统多方案指标权衡分析。
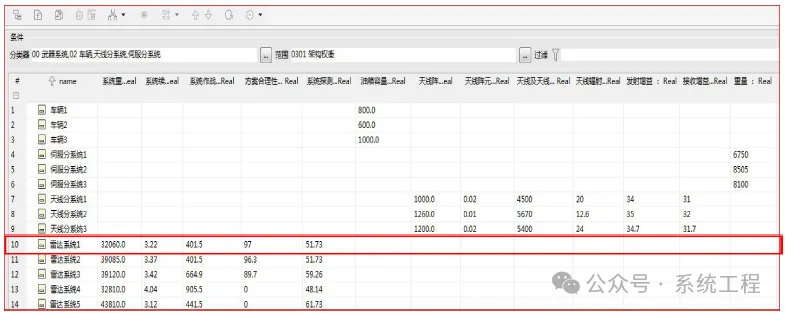
图4 系统多方案指标权衡分析
3.2 基于模型的分系统设计
基于模型的分系统设计以任务模型为输入,与雷达系统的方案设计思路基本一致,分别开展分系统的逻辑架构设计、工作过程设计、指标设计和结构设计等工作。如图5
所示,以伺服分系统为例,其白盒模型主要包括架构模型、接口模型、状态机模型、工作过程模型以及性能指标模型。
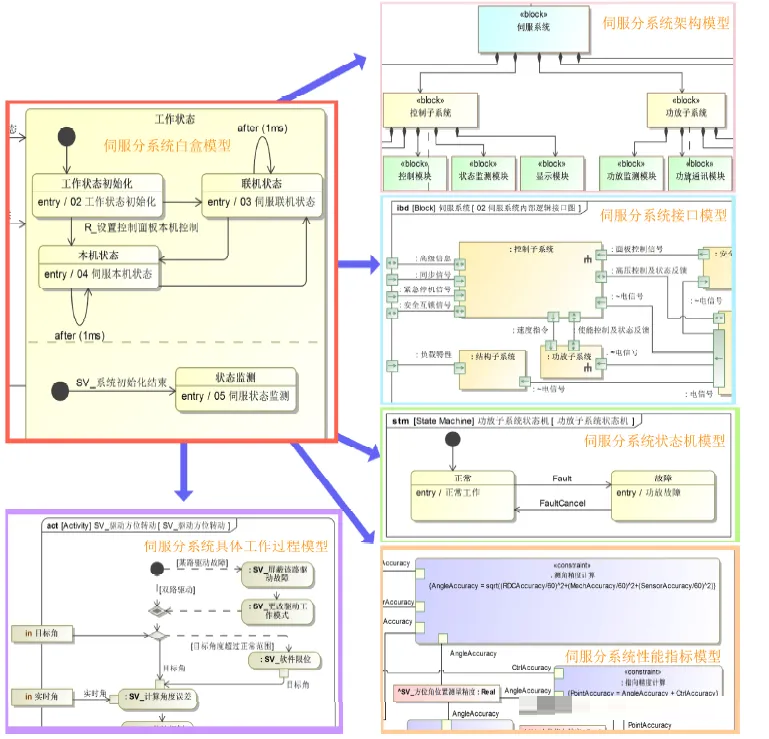
图5 分系统设计模型设计示意图
其中,架构模型描述的是分系统的逻辑架构和物理架构,接口模型主要描述分系统的内部接口交互关系,工作过程模型侧重于描述分系统的状态转换关系和动态逻辑行为,性能指标模型描述的是分系统技术指标的关联及约束关系。
在构建分系统工作过程模型的同时,采用Creo、HFSS、CST、MWorks 等工具开展分系统专业设计工作。以伺服分系统为例,通过构建基于Modelica
的伺服专业领域模型实现控制模型和结构模型的协同设计。如图6 所示,集成轴承、齿轮等可视化三维机械设计模型与控制器、电机、电流传感器等控制模型。
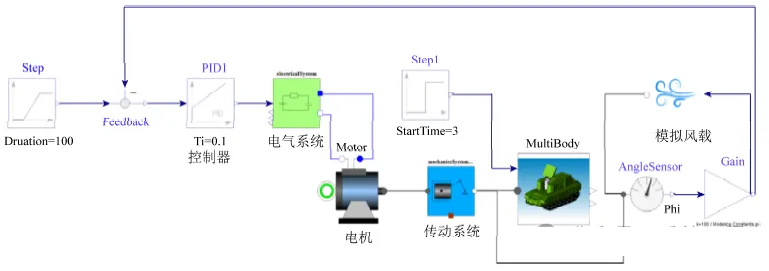
图6 伺服专业领域模型
将天线在不同迎风面下风负载的动态变化曲线替代原基于文本设计的风负载静态峰值。并通过对整个伺服分系统控制及传动部分的耦合仿真分析,定量分析各因素及其耦合关系对技术指标的影响,优化核心零部件的选型,支撑伺服分系统的设计工作。
4 模型驱动下的系统仿真验证
基于模型的仿真验证主要分为3 个仿真层级:①系统架构仿真;②系统与分系统功能仿真;③系统与分系统功-性能联合仿真。
4.1 基于模型的系统架构仿真
在系统架构仿真层级,主要将各分系统视为黑盒,通过状态机描述各分系统的功能。在雷达系统可视化模型和仿真控制模型的控制下,利用状态机驱动雷达架构设计的接口交互模型,开展系统工作过程、分系统功能以及分系统间接口设计的仿真验证,实现了系统架构设计的动态验证,并验证系统架构设计是否满足系统需求。图7
为雷达系统架构的仿真验证示意图,搭建主要模型有:
1) 雷达系统可视化模型。主要包括雷达搜索和跟踪过程可视化场景;
2) 雷达系统接口交互模型。主要包括内部模块图、交互数据及信号等;
3) 雷达系统仿真控制模型。主要按照雷达工作时序控制各分系统完成模型仿真;
4) 雷达分系统黑盒模型。主要描述分系统的工作过程,包括伺服分系统、车辆分系统、天线分系统等的功能状态机图和活动图。
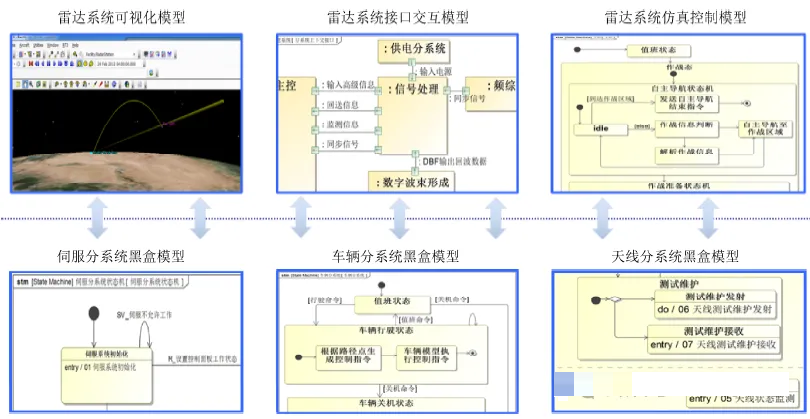
图7 系统架构的仿真验证示意图
4.2 基于模型的系统与分系统功能仿真
在系统与分系统仿真层级,基于系统架构联合仿真架构,用各分系统的白盒模型替代系统架构设计中的黑盒模型,以验证分系统的架构设计是否满足雷达系统需求、验证分系统的接口是否满足系统接口设计。将以往调试阶段开展的各分系统的接口、工作过程设计提前到系统前期设计中来,及时发现设计的问题和不足。在实际应用中,对已完成分系统的白盒模型可与其他分系统的黑盒模型协同仿真,如雷达天线、接收分系统采用黑盒模型,信号处理分系统采用白盒模型,不用等待所有分系统白盒设计完再开展。
如图8 所示,采用STK 可视化模型、系统内部交互关系模型、分系统白盒模型的状态机图、活动图等模型替代系统架构仿真中的分系统黑盒模型,以实现分系统的功能仿真验证。
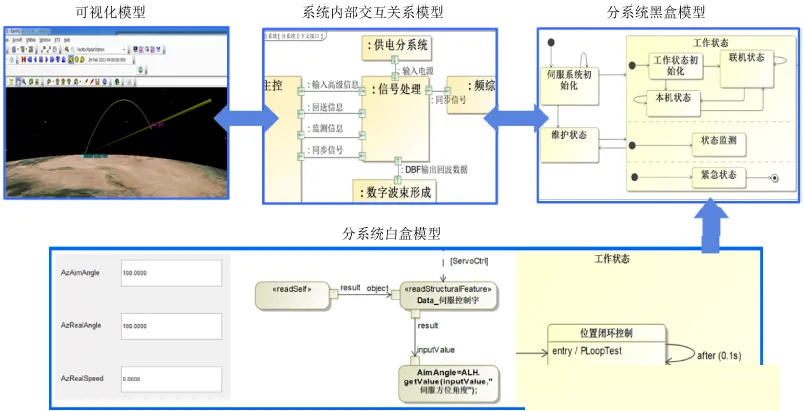
图8 系统与分系统功能仿真验证示意图
4.3 基于模型的系统与分系统功-性能仿真
系统与分系统功-性能联合仿真的目的在于进一步提高模型的置信度。在系统的功能需求得到验证后,保持系统的功能逻辑不变,采用专业领域模型对系统的性能需求进行验证,实现总体协同多个分系统的设计模型,进行系统集成验证,优化系统功能与架构的设计。图9
为雷达系统与分系统功-性能仿真验证示意图,包括雷达可视化模型、系统仿真界面、系统模型、分系统模型和专业模型。雷达系统模型控制雷达工作过程和时序,联合分系统设计模型和专业模型开展仿真,同时数据驱动可视化模型和系统仿真界面显示雷达搜索、跟踪过程和数据。

图9 系统与分系统功-性能仿真验证示意图
1) 集成可视化模型实现场景展示。通过构建可视化模型对雷达作战、维护等场景进行仿真以验证系统是否满足场景需求。如图9
所示,将雷达系统可视化模型的仿真动作与系统模型的功能活动进行关联,实现系统模型仿真分析的同时,可视化模型可进行同步仿真展示。为了提高人机交互友好性,通过仿真界面对雷达系统工作过程、时序控制、交互参数等部分进行可视化显示。
2) 集成专业领域模型实现功-性能联合仿真。在系统的分系统功-性能联合仿真层级,为了让模型更贴近真实作战装备的性能,以伺服分系统为例。如图9
所示,将分系统模型通过TCP、UDP等通讯机制调用专业模型,以实现分系统功-性能的仿真验证。另外,根据具体装备的结构特性,可持续细化专业领域模型的颗粒度,将摩擦、齿隙等非线性环节融合到模型中,尽可能地精确模拟伺服分系统。
5 结束语
针对目前雷达系统研制过程中存在的问题,本文重点将系统的协同设计由基于文档的串行方式向基于模型和数据的并行方式转变。本文基于场景开展了雷达系统的需求分析,保证了需求的完备性和一致性;并未照搬现有成熟的功能分析方法,而是针对雷达功能成熟度、复杂度等特点,采用不同的功能分析方法;打通了模型驱动的雷达系统到分系统的设计过程,实现了系统架构仿真、系统与分系统功能仿真、系统与分系统功-性能联合仿真3
个层级的仿真验证,将以往调试阶段的部分验证环节提前到系统设计阶段。目前在研制雷达过程中,研制团队采用基于MBSE
的方法有效地解决传统设计中需求分析不足,过度依赖实物验证的问题,完成了由经验研发向需求研发的转变。但在研制过程中,由于不同层级模型存在颗粒度、逼真度等不同问题,导致系统仿真的实时性有待提高。未来将在后续的研究中针对性地解决此问题,并根据雷达研制需求深入研究虚实结合的联合仿真方法。
| 







