Introduction: what is it supposed to do
?
I dedicated myself to creating a .NET component
that allows the building of graphs and the performance of
some operations on these structures. In particular A*, the
famous path finding algorithm, can be run to find the best
path between two places.
First and foremost it should be kept in
mind that a graph is defined with :
- A list of nodes
- A list of arcs
Each node is defined with the following
data :
- A geographical position in space (co-ordinates
X,Y,Z)
- The collection of the outgoing arcs
- The collection of the incoming arcs
Each arc is simply defined with its two
extremity nodes. So an arc is oriented from StartNode
to EndNode. It is also characterized by a crossing
factor named 'Weight'. This value represents the difficulty
to reach the ending node from the starting one. Thus, getting
through an arc has a cost, which can be basically calculated
like this :
Cost = Distance(StartNode, EndNode) * Weight
You may be asking "What is the use
of this structure ?...". Well, the applications can
be various, ranging from road maps and circulation models
to a character's mobility in a video game. Now the question
is: "How one would move across this graph ?".
What is A* ?
Imagine that you are on a node and that
you want to reach another position somewhere else on the
graph. Then ask : "Which way will I follow, and why
?". The main factor to take into account here is the
cost of moving. It must be minimal. The cost criterion is
basically a function of the distance (sum of arcs' lengths).
However, it can also be adjusted and varied with other data,
which describe for example the slope, the harshness/practicability
of the ground. You can even model a traffic jam.
To achieve the best path, there are many
algorithms which are more or less effective, depending on
the particular case. Efficiency depends not only on the
time needed for calculation, but also on the reliability
of the result. A* is able to return the best path (if it
exists) between two nodes, according to accessibility/orientation
and, of course, cost of arcs.
Among the variety of existing algorithms,
some do not always actually return the best path, but they
can give precedence to speed over accuracy. Efficiency depends
on the number of nodes and on their geographical distribution.
However in most cases A* turns out to be the most effective,
because it combines optimized search with the use of a heuristic.
A heuristic is a function that associates
a value with a node to gauge it. One node is considered
better than another, if the final point is reached with
less effort (e.g. shorter distance).
A* will always return the shortest path
if, and only if, the heuristic is admissible; that
is to say, if it never overestimates. On the other hand,
if the heuristic is not admissible, A* will find a path
in less time and with less memory usage, but without the
absolute guaranty that it is the best one. Here are three
admissible heuristics which correspond to a particular distance
between the node of evaluation and the target node :
- Euclidean distance > Sqrt(Dx²+Dy²+Dz²)
- Manhattan distance > |Dx|+|Dy|+|Dz|
- Maximum distance > Max(|Dx|, |Dy|,
|Dz|)
These functions give an estimation of the
remaining distance for each node that can be explored. Thus
the search can be oriented toward the 'best' nodes. For
a given node, the sum [Current cost + Heuristic value] is
an estimation of the cost of reaching the ending node from
the starting node, passing by the current one. This value
is used to continuously choose the most promising path.
In practice, the algorithm maintains 2
lists of nodes that are filled and modified during the search
:
- The first one, called
Open,
contains the tracks leading to nodes that can be explored.
Initially, there is only the starting node. At each step,
the best node of Open is taken out. Then,
the best successor of this node (according to the heuristic)
is added to the list as a new track. One doesn't know
where the nodes that are in Open lead, because
they have not been propagated yet. However, the best one
is examined at each new step.
- The second one, called
Closed,
stores the tracks leading to nodes that have already been
explored.
The program is based on a recursive model.
The loop is performed as long as Open still
contains some elements. See the code for details (written
with C#, it is sufficient enough to be self explainable).
public bool SearchPath(Node StartNode, Node EndNode)
{
lock (_Graph)
{
Initialize(StartNode, EndNode);
while ( NextStep() ) {}
return PathFound;
}
}
Using the code: public interfaces of the
component
The Graph class
gathers a set of methods to manage its data, such as :
- Add/Suppress a node/arc
- Get the nearest/farthest node/arc from
a point
- Activate/Inactivate the entire graph
- Empty the graph
From a more practical point of view, here
are the methods and properties you can use for the main
classes and objects :
public class Graph
{
public Graph()
public IList Nodes { get }
public IList Arcs { get }
public void Clear()
public bool AddNode(Node NewNode)
public Node AddNode(float x, float y, float z)
public bool AddArc(Arc NewArc)
public Arc AddArc(Node StartNode, Node EndNode, float Weight)
public void Add2Arcs(Node Node1, Node Node2, float Weight)
public bool RemoveNode(Node NodeToRemove)
public bool RemoveArc(Arc ArcToRemove)
public void BoundingBox(out double[] MinPt, out double[] MaxPt)
public Node ClosestNode(double X, double Y, double Z, out double Dist,
bool IgnoreFreeWay)
public Arc ClosestArc(double X, double Y, double Z, out double Dist,
bool IgnoreFreeWay)
}
public class Node
{
public Node(double PositionX, double PositionY, double PositionZ)
public IList IncomingArcs { get }
public IList OutgoingArcs { get }
public double X { get }
public double Y { get }
public double Z { get }
public void ChangeXYZ(double PositionX, double PositionY,
double PositionZ)
public bool Passable { get/set }
public Node[] AccessibleNodes { get }
public Node[] AccessingNodes { get }
public void UntieIncomingArcs()
public void UntieOutgoingArcs()
public void Isolate()
public Arc ArcGoingTo(Node N)
public Arc ArcComingFrom(Node N)
public object Clone()
public static void BoundingBox(IList NodesGroup, out double[] MinPt,
out double[] MaxPt)
public static double EuclidianDistance(Node N1, Node N2)
public static double SquareEuclidianDistance(Node N1, Node N2)
public static double ManhattanDistance(Node N1, Node N2)
public static double MaxDistanceAlongAxis(Node N1, Node N2)
public override string ToString()
public override bool Equals(object O)
public override int GetHashCode()
}
public class Arc
{
public Arc(Node Start, Node End)
public Node StartNode { get/set }
public Node EndNode { get/set }
public double Weight { get/set }
public bool Passable { get/set }
virtual public double Cost { get }
public double Length { get }
virtual protected double CalculateLength()
public override string ToString()
public override bool Equals(object O)
public override int GetHashCode()
}
public class AStar
{
public AStar(Graph G)
public bool SearchPath(Node StartNode, Node EndNode)
public void Initialize(Node StartNode, Node EndNode)
public bool NextStep()
public bool Initialized { get }
public int StepCounter { get }
public bool SearchStarted { get }
public bool SearchEnded { get }
public bool PathFound { get }
public Node[] PathByNodes { get }
public Arc[] PathByArcs { get }
public bool ResultInformation(out int NbArcsOfPath, out double CostOfPath)
public double DijkstraHeuristicBalance { get/set }
public Heuristic ChoosenHeuristic { get/set }
public static Heuristic EuclidianHeuristic { get }
public static Heuristic MaxAlongAxisHeuristic { get }
public static Heuristic ManhattanHeuristic { get }
}
Nodes and arcs can be Passable or
not. Selecting one of these two states for a node, propagates
the same state to outgoing and incoming arcs. Likewise,
destroying a node implies the destruction of all the directly
linked arcs. In addition, an arc must always be linked to
two nodes, whereas a node can be isolated.
Note that these data override Object.ToString()
as well as Object.Equals(Object O).
Moreover they can be serialized.
Simple example of the usage with the console
application
using System;
using System.Collections;
using System.Text;
using System.IO;
using System.Runtime.Serialization;
using System.Runtime.Serialization.Formatters.Binary;
using EMK.Cartography;
namespace EMK.Tests
{
public class TestAStar
{
public static void Main()
{
try
{
Graph G = new Graph();
Node N1 = G.AddNode(0,0,0);
Node N2 = G.AddNode(5,0,0);
Node N3 = G.AddNode(5,5,0);
Node N4 = G.AddNode(5,5,5);
G.AddArc(N1,N2,1);
G.AddArc(N2,N3,1);
G.AddArc(N3,N4,1);
G.AddArc(N1,N3,1);
Console.WriteLine( ListNodesAndArcs(G) );
Console.WriteLine("Best path to reach "+N4+" from "+N1+" :");
AStar AS = new AStar(G);
if ( AS.SearchPath(N1, N4) )
foreach (Arc A in AS.PathByArcs)
Console.WriteLine( A.ToString() );
else Console.WriteLine( "No result !" );
Console.Write("Serialize and Deserialize. ");
Stream StreamWrite = File.Create("GraphSaved.bin");
BinaryFormatter BinaryWrite = new BinaryFormatter();
BinaryWrite.Serialize(StreamWrite, G);
StreamWrite.Close();
Stream StreamRead = File.OpenRead("GraphSaved.bin");
BinaryFormatter BinaryRead = new BinaryFormatter();
Graph G2 = (Graph) BinaryRead.Deserialize(StreamRead);
StreamRead.Close();
Console.WriteLine( ListNodesAndArcs(G2) );
}
catch(Exception e)
{
Console.Write( "Error :\n\n"+e.ToString() );
}
}
static private string ListNodesAndArcs(Graph GraphToDescribe)
{
StringBuilder SB = new
StringBuilder("Description of the Graph:\n\tNodes> ");
foreach (Node N in GraphToDescribe.Nodes)
SB.Append( N.ToString()+"; " );
SB.Append("\n\tArcs> ");
foreach (Arc A in GraphToDescribe.Arcs)
SB.Append( A.ToString()+"; " );
return SB.ToString();
}
}
}
Description of the Graph:
Nodes> {0;0;0}; {5;0;0}; {5;5;0}; {5;5;5}
Arcs> {0;0;0}-->{5;0;0}; {5;0;0}-->{5;5;0};
{5;5;0}-->{5;5;5}; {0;0;0}-->{5;5;0}
Best path to reach {5;5;5} from {0;0;0} :
{0;0;0}-->{5;5;0}
{5;5;0}-->{5;5;5}
Serialize and Deserialize. Description of the Graph:
Nodes> {0;0;0}; {5;0;0}; {5;5;0}; {5;5;5}
Arcs> {0;0;0}-->{5;0;0}; {5;0;0}-->{5;5;0};
{5;5;0}-->{5;5;5}; {0;0;0}-->{5;5;0}
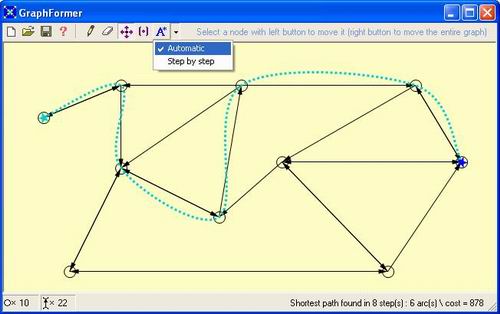
Example of use in a graphical environment
The graphical interface aims at bringing
the component into play so as to reflect, fairly and simply,
what it can do. The application lets you draw, move, erase
or inactivate several nodes and arcs. When your graph is
complete you just have to click on the 'A*' icon and select
the starting and ending nodes with the respective left and
right mouse buttons. Then you will automatically see the
best way. If you modify the graph, this path will be updated.
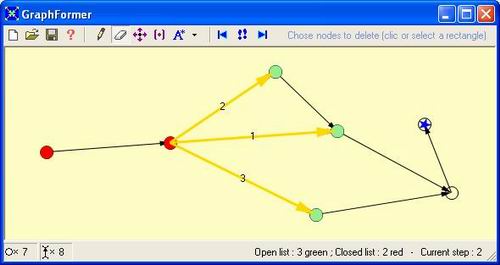
If you want to visualize the algorithm's
logic, then select the 'Step by Step' mode in the sub-menu
of the 'A*' icon. The idea is to give the user a clear view
of what happens.
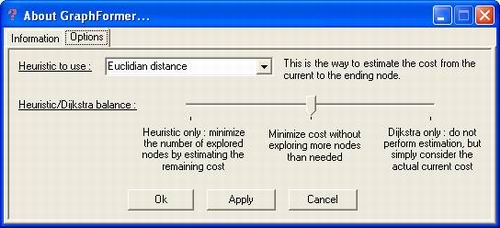
In the option panel ('?' icon), you can
change the heuristic and set its influence. The min value
(in fact 0) means that only the heuristic will be used.
On the contrary, the max value (in fact 1) means that the
search will behave in accordance with the Dijkstra algorithm.
Remarks
The program has been validated with a series
of adapted tests, gathering various scenarios and interactions.
Nevertheless it does not aim to be a perfect application,
but an unassuming program that modestly claims to be simple
and ergonomic. For information, I had already done this
work with C++ for the DLL as well as MFC for the 2D graphical
interface. I had also tested it in a 3D context with an
OpenGL graphical interface. The next step will be to implement
the 3D interface with Direct3D 9.0 for .NET or with one
of the OpenGL solutions for this framework.
The source code contains a light but interesting
implementation of geometrical tools such as Point3D and
Vector3D. They were needed for graphical interactions in
the GraphFormer example application (projections
on lines, vectors' operations, etc...).
For convenience and performance I used
the SortableList type for Closed
and Open lists. The advantage is that, the best track
will always be the first element, since the list remains
sorted (cf the article I have written formerly about Automatic
Sorted List). Nonetheless it would be very easy to replace
it with another list type, such as ArrayList,
provided you look for the 'best' element (that is to say
the lower) at each step. |