| 编辑推荐: |
本文主要介绍了
Autosar的基本框架及详细的通信服务内容,希望对您的学习有所帮助。
本文来自于实战派掌门,由火龙果软件Linda编辑、推荐。 |
|
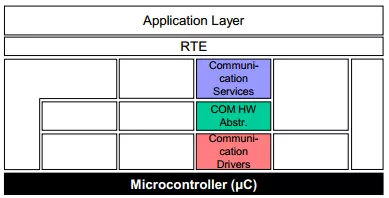
AUTOSAR联盟在召开架构讨论会上,工程师讲解了AUTOSAR的基本框架(另见《AUTOSAR架构的故事(干货)》),同时提出Communication部分另外讨论。这次这位工程师准备了丰富的资料将通信服务详细讲解了一番。
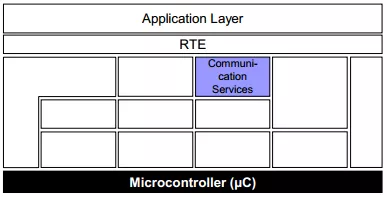
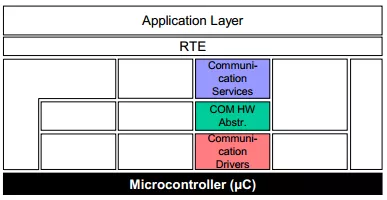
1 Communication Services – General
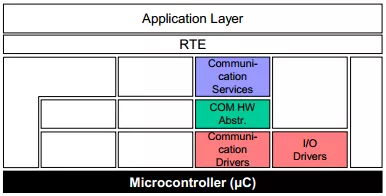
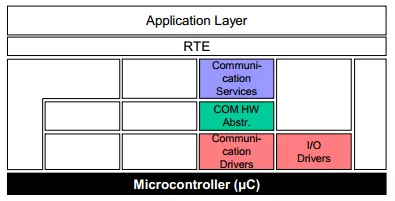
Communication Service通信服务是一组用于车辆网络通信(CAN,LIN,FlexRay和以太网)的模块。它们通过通信硬件抽象与通信驱动程序接口。
任务:
为车辆网络提供统一的接口以进行通信。
提供统一的网络管理服务提供统一的车辆网络接口以进行诊断通信
在应用程序中隐藏协议和消息属性。
特性:
实现了μC和ECU硬件独立,部分取决于总线类型
上层接口与μC,ECU硬件和总线类型无关。
通信服务将在以下页面中详细介绍每个相关的车辆网络系统。
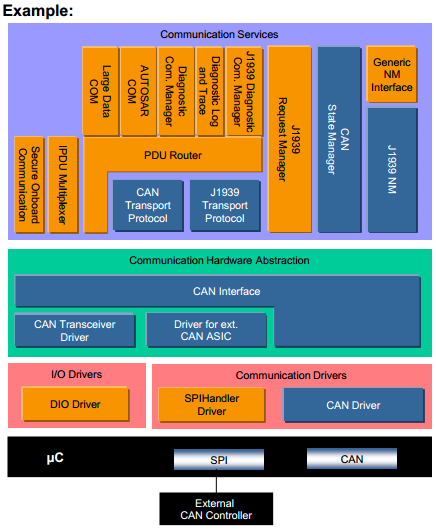
2 Communication Stack – CAN
CAN通信服务是一组模块,用于与通信系统CAN进行车辆网络通信。
它提供与CAN网络的统一接口。在应用程序中隐藏协议和消息属性。
CAN通信栈支持,经典CAN通讯(CAN 2.0)和CAN FD通信(如果硬件支持)

特性:
实现了μC和ECU硬件独立,部分取决于CAN。
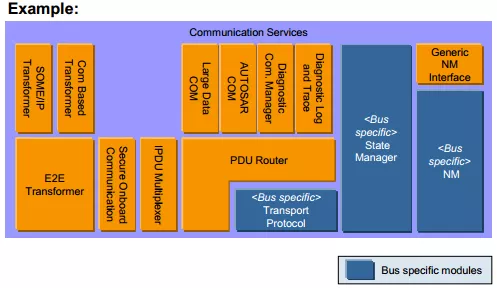
AUTOSAR COM,通用NM(网络管理)接口和诊断通信管理器对于所有车辆网络系统都是相同的,每个ECU作为一个实例存在。
通用NM接口仅包含一个调度程序, 不包括其他功能。对于网关ECU,它还可以包括NM协调器功能,该功能允许同步多个(相同或不同类型的)不同网络以同步唤醒或关闭它们。
CAN NM专用于CAN网络,并将在每个CAN车辆网络系统中实例化。
特定于通信系统的Can State Manager可以处理依赖于通信系统的启动和关闭功能。此外,它还控制COM的不同选项,以发送PDU并监视信号超时。
Communication Stack Extension – TTCAN
特性:
TTCAN是CAN的绝对超集,即支持TTCAN的CAN栈可以同时服务于CAN和TTCAN总线。
CanIf和CanDrv是仅有的需要扩展才能为TTCAN通信提供服务的模块。
对于具有TTCAN功能的CAN,Communication Stack CAN的属性也适用。
3 Communication Stack Extension – J1939
J1939通信服务扩展了普通的CAN通信栈,用于重型车辆中的车辆网络通信。
它提供J1939所需的协议服务。在不需要的地方从应用程序隐藏协议和消息属性。
注意,CAN栈中有两个传输协议模块(CanTp和J1939Tp),可以在不同的通道上交替使用或并行使用
它们的用法如下:
CanTp:ISO诊断(DCM),标准CAN总线上的大型PDU传输
J1939Tp:J1939诊断,J1939驱动的CAN总线上的大型PDU传输
特性:
实现了基于CAN,独立于μC和ECU硬件。
AUTOSAR COM,通用NM(网络管理)接口和诊断通信管理器对于所有车辆网络系统都是相同的,每个ECU作为一个实例存在。
支持在配置时未知的动态帧标识符。
J1939网络管理可为每个ECU分配唯一的地址,但不支持睡眠/唤醒处理以及诸如部分联网之类的相关概念。
提供J1939诊断和请求处理。
4 Communication Stack – LIN
LIN通信服务是用于与通信系统LIN进行车辆网络通信的一组模块。
它提供到LIN网络的统一接口。在应用程序中隐藏协议和消息属性。
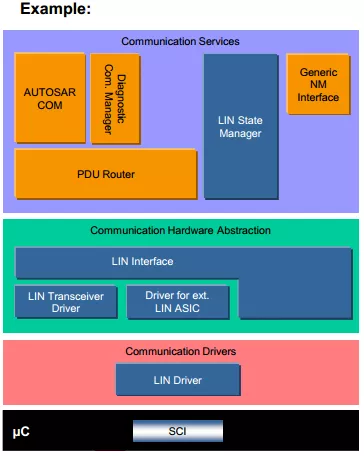
LIN通信服务包含:
符合ISO 17987的通信栈
计划表管理器,用于处理切换到其他计划表的请求(对于LIN主节点)
不同LIN框架类型的通讯处理
传输协议,用于诊断
唤醒和睡眠界面
基本的LIN驱动程序:
实施LIN协议并访问特定的硬件
同时支持简单的UART和基于复杂帧的LIN硬件
注意将LIN集成到AUTOSAR中的情况:
LIN接口控制WakeUp / Sleep API,并允许Slave端使总线保持唤醒状态(分散式方法)。
特定于通信系统的LIN状态管理器处理与通信相关的启动和关闭功能。此外,它控制来自Communication
Manager的通信模式请求。LIN状态管理器还通过连接COM来控制I-PDU组。
发送LIN帧时,LIN接口在需要数据的时间点(即在发送LIN帧之前)向PDU路由器请求帧(I-PDU)的数据。
5 Communication Stack – FlexRay
FlexRay通信服务是一组模块,用于与通信系统FlexRay进行车辆网络通信。
它提供与FlexRay网络的统一接口。在应用程序中隐藏协议和消息属性。
注意:
FlexRay栈中有两个传输协议模块,可以交替使用
FrTp:FlexRay ISO传输层
FrArTp:FlexRay AUTOSAR传输层,提供与AUTOSAR R3.x的总线兼容性

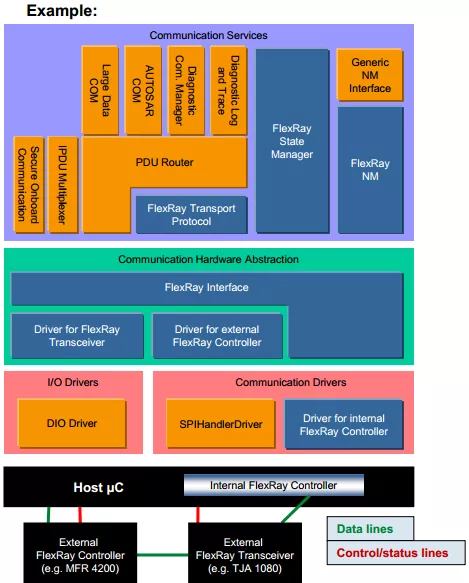
特性:
AUTOSAR COM,通用NM接口和诊断通信管理器对于所有车辆网络系统都是相同的,每个ECU作为一个实例存在。
通用NM接口仅包含一个调度程序。不包括其他功能。对于网关ECU,将其替换为NM协调器,该协调器还提供了同步多个不同网络(相同或不同类型)以同步唤醒或关闭它们的功能。
FlexRay NM专门用于FlexRay网络,并在FlexRay车载网络系统中实例化。
特定于通信系统的FlexRay状态管理器处理与通信系统有关的启动和关闭功能。此外,它还控制COM的不同选项,以发送PDU并监视信号超时。
6 Communication Stack – TCP/IP
TCP/IP通信服务是一组模块,用于与通信系统TCP/IP进行车辆网络通信。
它提供一个到TCP/IP网络的统一接口。在应用程序中隐藏协议和消息属性。
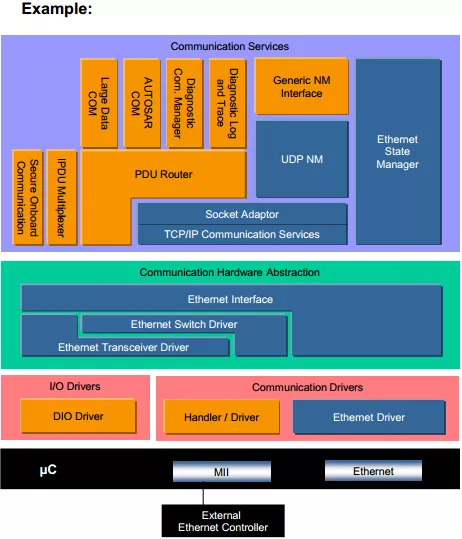
特性:
TcpIp模块实现TCP / IP协议家族的主要协议(TCP,UDP,IPv4,IPv6,ARP,ICMP,DHCP)并通过以太网提供基于套接字的动态通信。
套接字适配器模块(SoAd)是TcpIp模块的唯一上层模块。
7 Communication Stack – General
General Communication Stack属性:
信号网关是AUTOSAR COM的一部分,用于路由信号。
基于PDU的网关是PDU路由器的一部分。
IPDU复用提供了添加信息的可能性,以实现I-PDU的复用(内容不同,但总线上的ID相同)。
多I-PDU到容器的映射提供了将多个I-PDU组合成一个较大的(容器)I-PDU的可能性,以便在一个(特定于总线的)帧中进行传输。
上层接口:μC,ECU硬件和网络类型无关。
有关GW体系结构的细化,请参阅“示例通信”
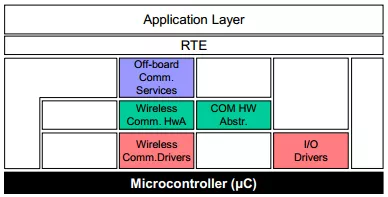
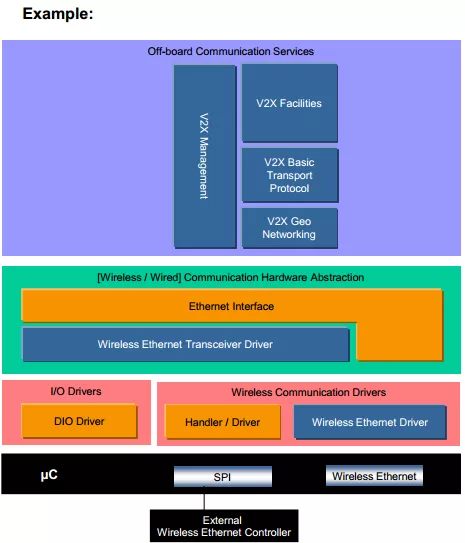
8 Off-board Communication Stack – Vehicle-2-X
Off-board Communication Service是用于通过自组织无线网络进行Vehicle-to-X通信的一组模块。
实现用于接收和传输标准化V2X消息的功能,为特定于车辆的SW-C建立接口
基本传输协议=第4层
地理网络=第3层(根据地理区域寻址,相应的以太网帧具有自己的以太类型)
V2X管理:管理跨层功能(例如动态拥塞控制,安全性,位置和时间)
它提供与无线以太网网络的统一接口。在应用程序中隐藏协议和消息属性。
|





