|
目录
DoDAF建模图例(EA+UPDM)- 建模工具EA,建模语言UPDM
目录
DoDAF 简介
1. 全局视点
1.1 AV-1 概述和摘要信息
1.2 AV-3 度量
2. 能力视点
2.1 CV-1 愿景
2.2 CV-2 能力分类
2.3 CV-3 能力阶段
2.4 CV-4 能力依赖性
3. 操作视点
3.1 OV-1 高级操作概念图
3.2 OV-2 操作资源流描述
3.3 OV-4 组织关系图
3.4 OV5 操作活动
3.4.1 OV-5a 操作活动分解树
3.4.2 OV-5b 操作活动模型
3.5 OV -6 动态行为模型
3.5.1 OV-6a 操作规则模型
3.5.2 OV-6b 状态转换说明
3.5.3 OV-6c 事件跟踪描述
4. 服务视点
4.1 SOV-1 服务分类
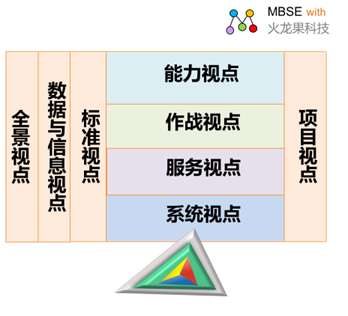
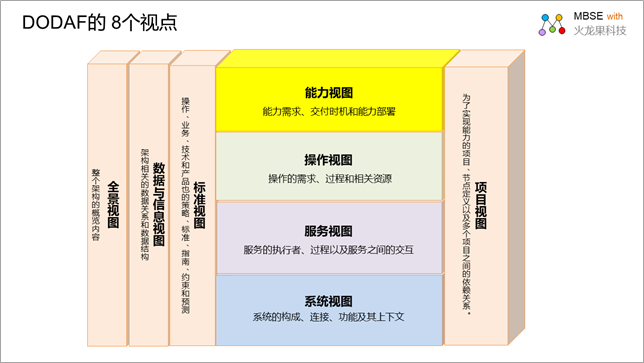
DoDAF 简介 DODAF 是美国国防部定义的体系架构参考架构,目的是为有多个系统构成的体系建立一个内容参考框架,让架构设计者可以了解体系架构都有哪些视点、这些视点中有哪些模型,这些模型应该描述什么,模型之间存在什么跟踪关系。 DoDAF 最新规范是 DoDAF v2.02 规范, DoDAF 有 8 个视点,如下图所示:
DoDAF 的 8 个视点简介如下:
| 视点 |
说明 |
| 全局视点( AV ) |
描述体系结构的顶层内容,以便给出架构的目标、范围和背景。 |
| 能力视点( CV ) |
描述了组织需要具有的能力。 |
| 数据和信息视点( DIV ) |
描述在组织业务活动中需要管理和使用的信息和规则。 |
| 操作视点( OV ) |
描述了执行操作所需的任务和活动、规则和资源流。 |
| 服务视点( SvcV ) |
描述了为了支持 DoD 的操作和业务能力所需要的服务及其互连。 |
| 系统视点( SV ) |
描述了支持 DoD 的能力所需要的系统和互连。 |
| 项目视点( PV ) |
描述了如何对项目进行编排、组织以便交付能力。 |
| 标准视点( StdV ) |
描述了体系结构及其工程应该遵循的技术标准。 |
DODAF 的8个视点一共有53个模型, UPDM ( Unified Profile for DoDAF and MODAF )是 OMG 定义的对 DODAF 建模的语言。 下面采用有人无人飞机协同作战系统为例,采用 UPDM 建模体系架构的模型。
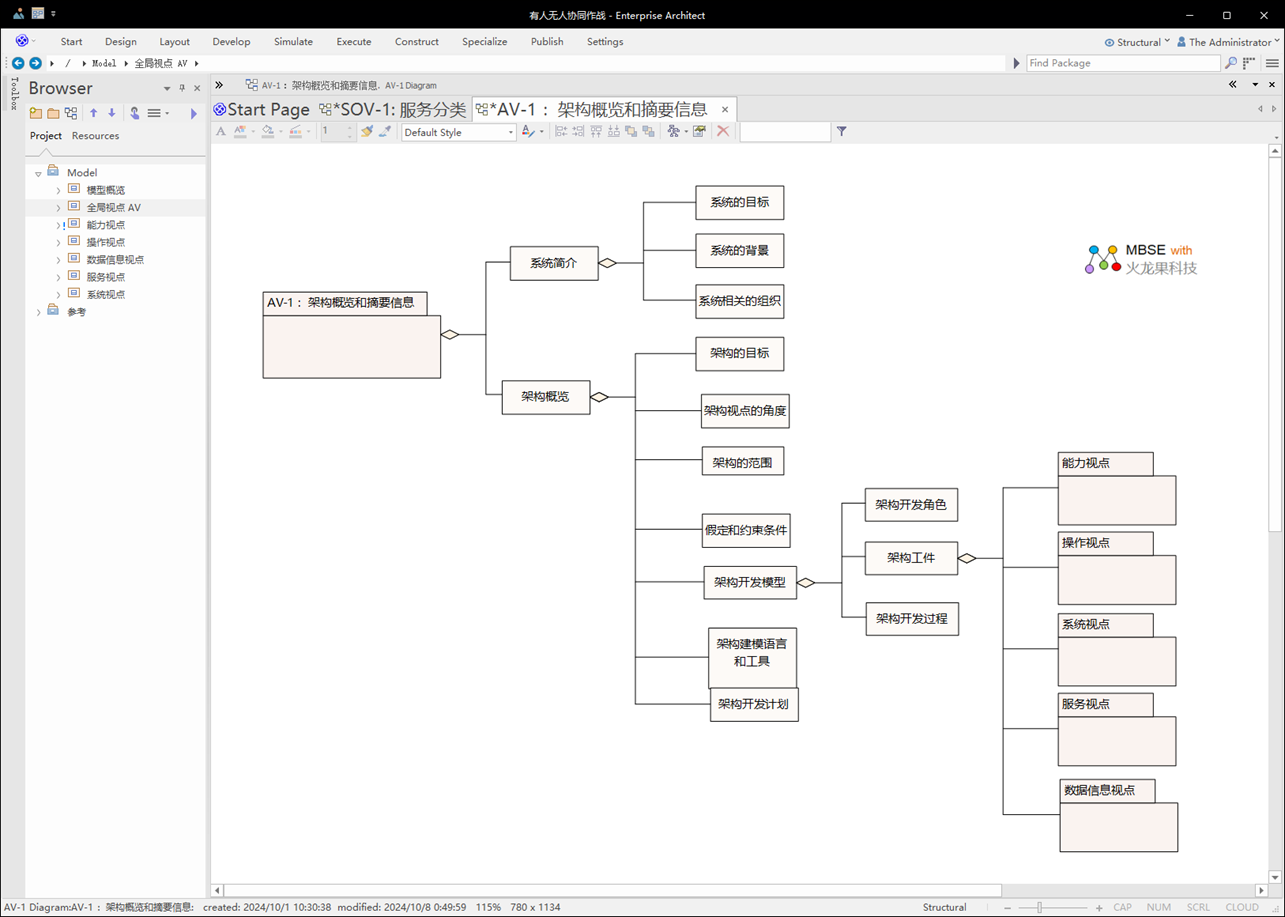
1. 全局视点 全局视点 ( All Viewpoint ) 描述体系架构开发工作的展望蓝图。
1.1 AV-1 概述和摘要信息 AV1 描述了架构开发项目的前景概览,可以作为高层对架构进行决策的基础,也可以作为架构读者了解架构模型的导航视图。如下是 AV1 的模型图例(采用建模工具 EA, 有人无人协同系统 ):
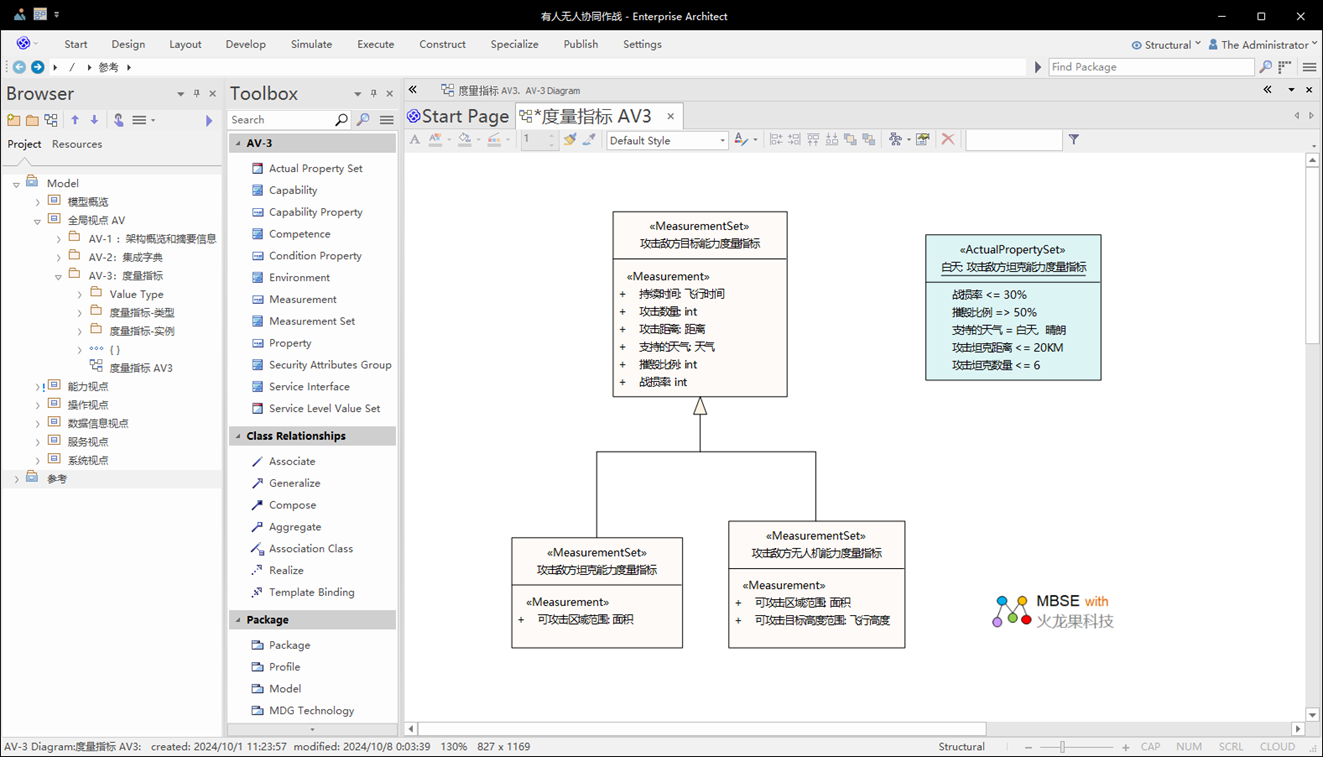
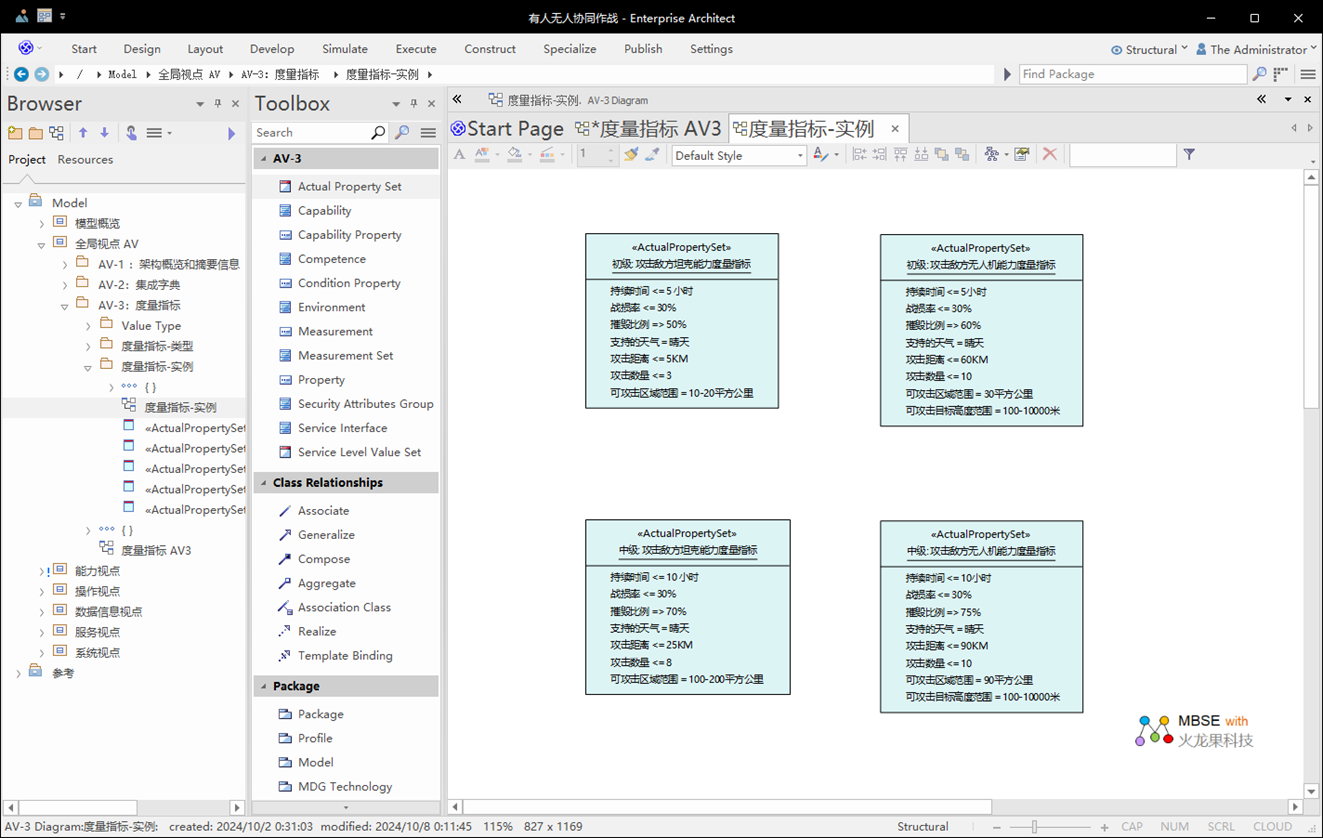
1.2 AV -3 度量
AV3 提供架构相关的度量指标。对于度量指标定义量化单位和数据类型。
如下是示例的度量指标集- 类型(采用建模工具 EA, 有人无人协同系统 ):
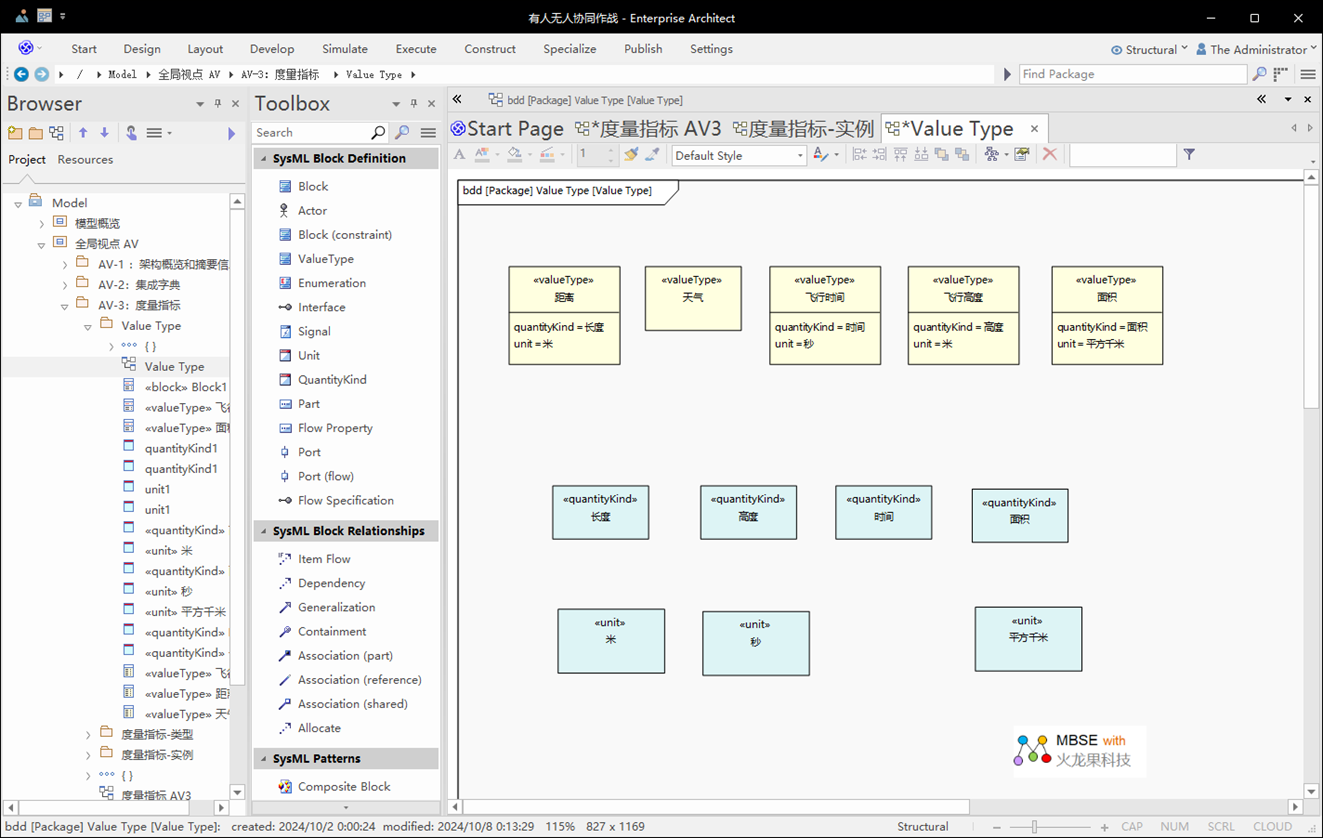
如下是示例的度量指标集 - 实例(采用建模工具 EA, 有人无人协同系统 ):
如下是度量指标所引用的数值类型(采用建模工具 EA, 有人无人协同系统 ):
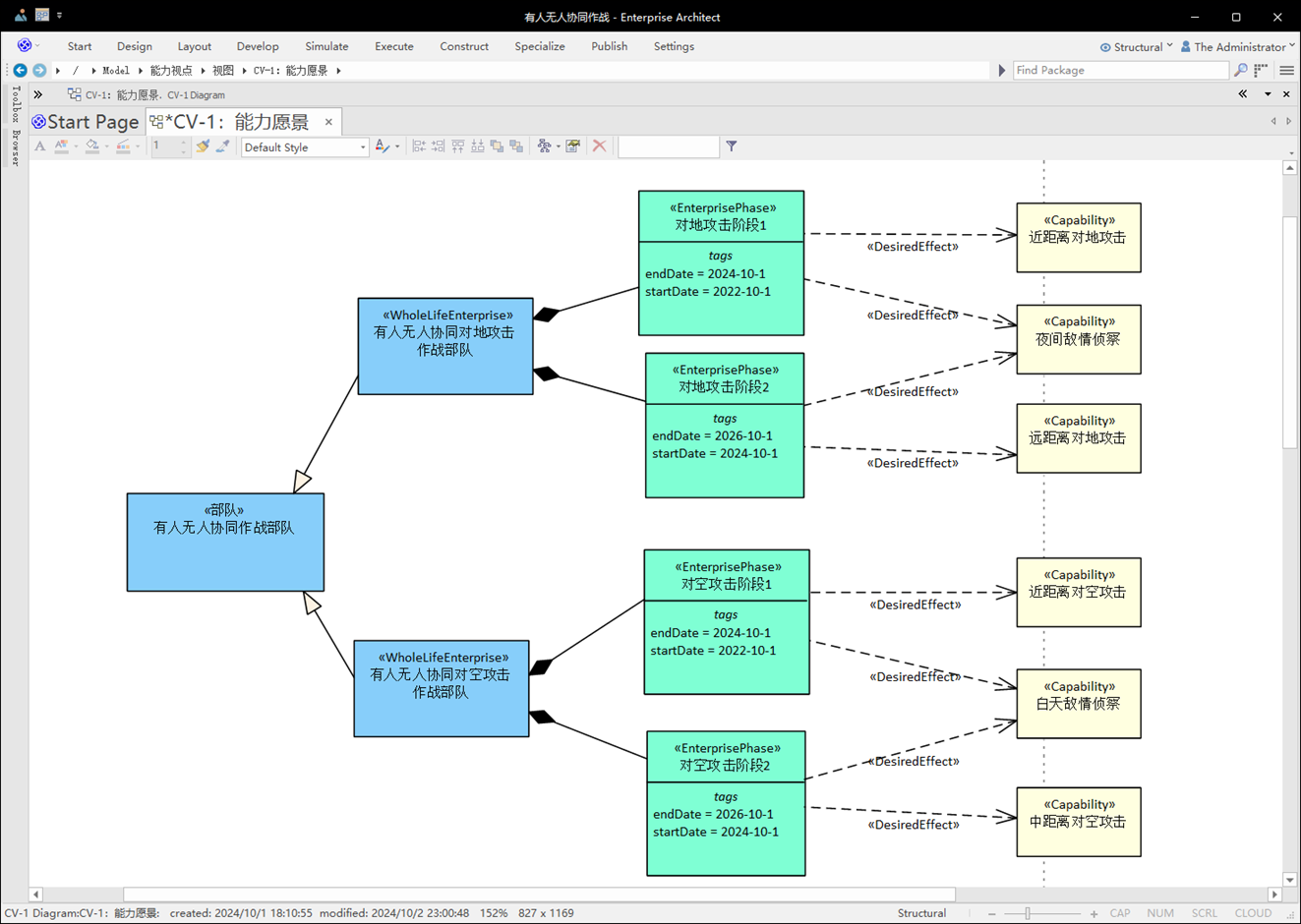
2. 能力视点 能力视点描述企业需要具备的能力。 2.1 CV-1 愿景 CV-1 对企业未来的能力发展愿景进行了规划。 如下是 CV-1 能力愿景模型示例(采用建模工具 EA, 有人无人协同系统 ):
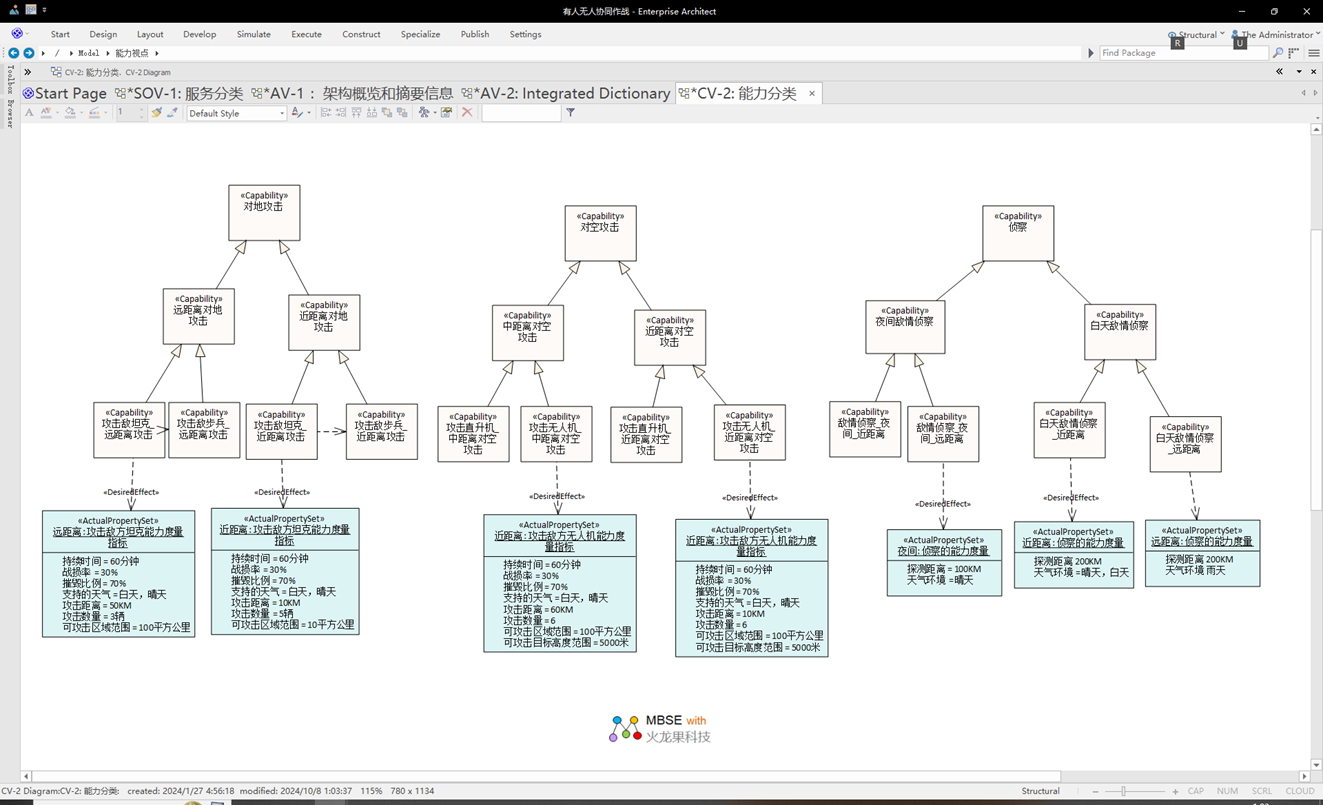
2.2 CV-2 能力分类 CV 2 对定义的能力以分类的方式进行描述,这些能力可以是当前需要的能力,也可以是未来需要的能力。 如下是 CV2模型 示例,包括能力分类和能力度量(采用建模工具 EA, 有人无人协同系统 ):
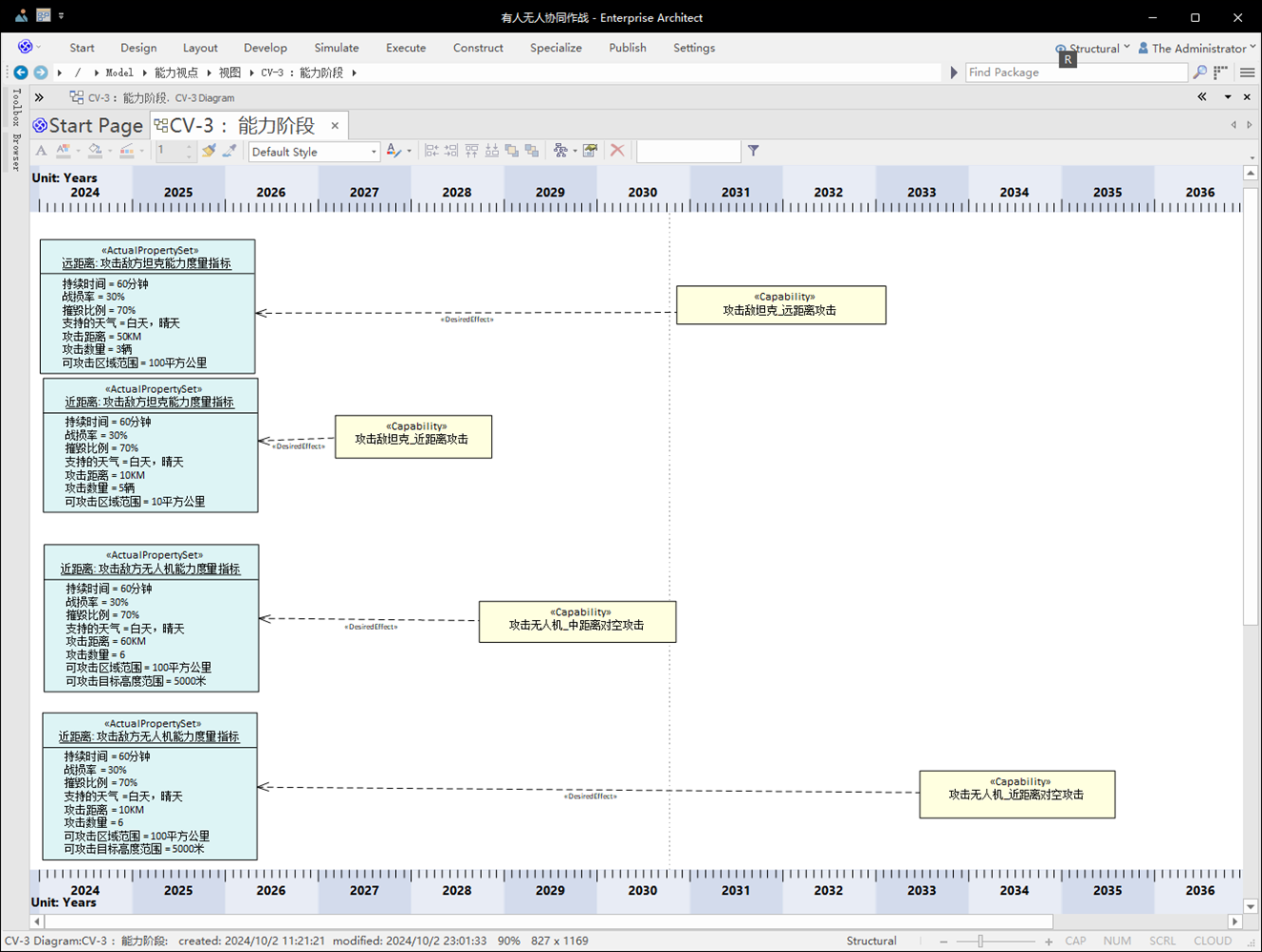
2.3 CV-3 能力阶段 CV3 描述能力的实现时间计划,对 CV2 中的能力定义交付时间表,划分能力的交付阶段。 如下是 CV3 模型 示例(采用建模工具 EA, 有人无人协同系统 ):
2.4 CV-4 能力依赖性
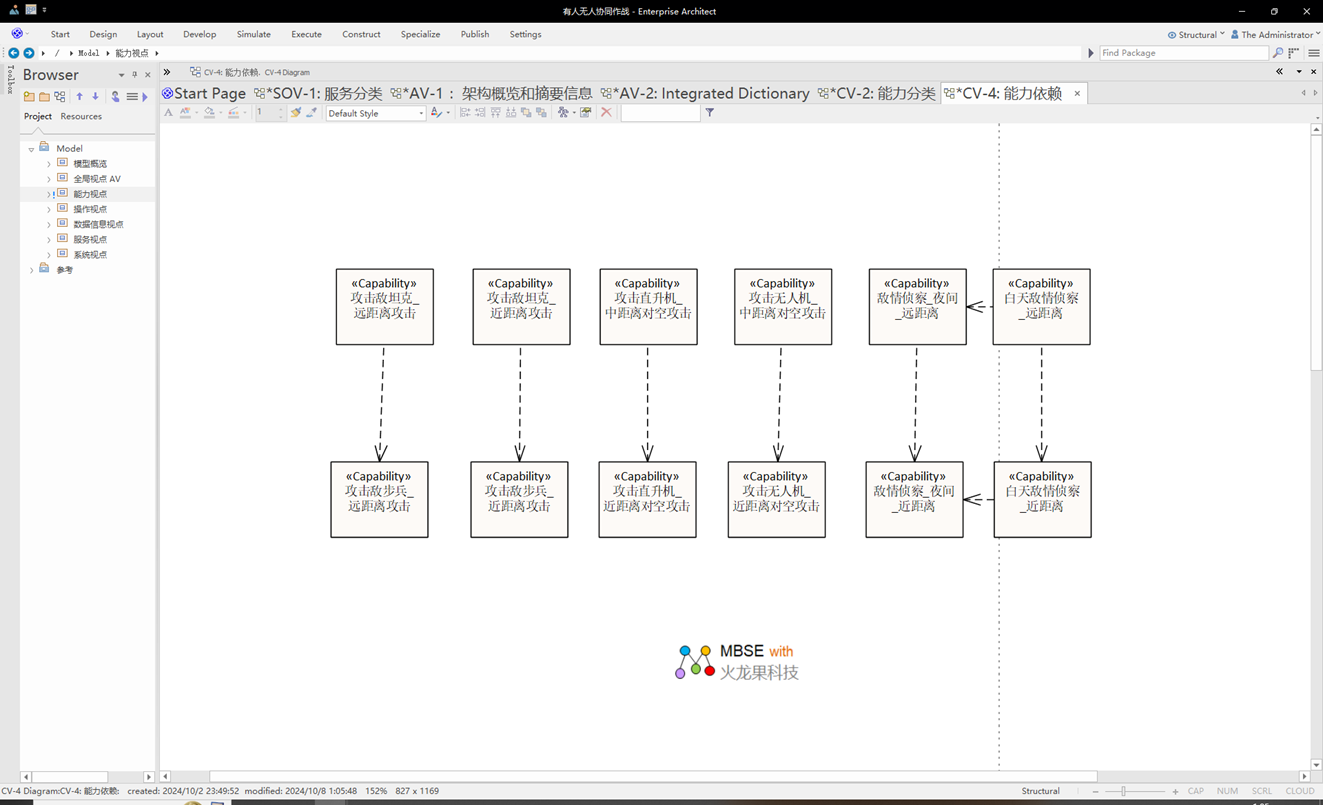
CV4 描述 CV2 定义的能力之间的依赖关系,同时也定义能力的分组。如下是 CV-4 能力依赖模型示例(采用建模工具 EA, 有人无人协同系统 ):
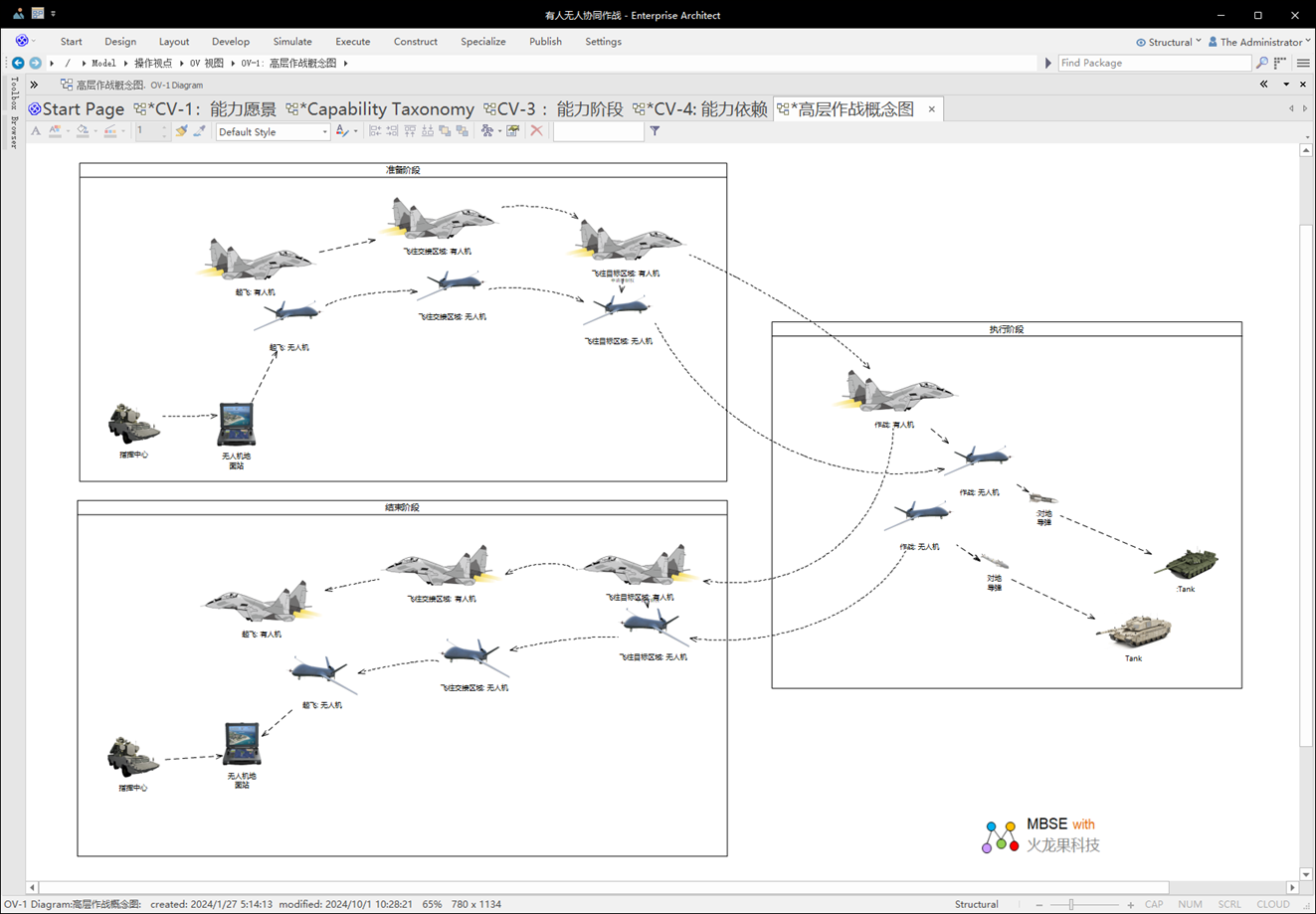
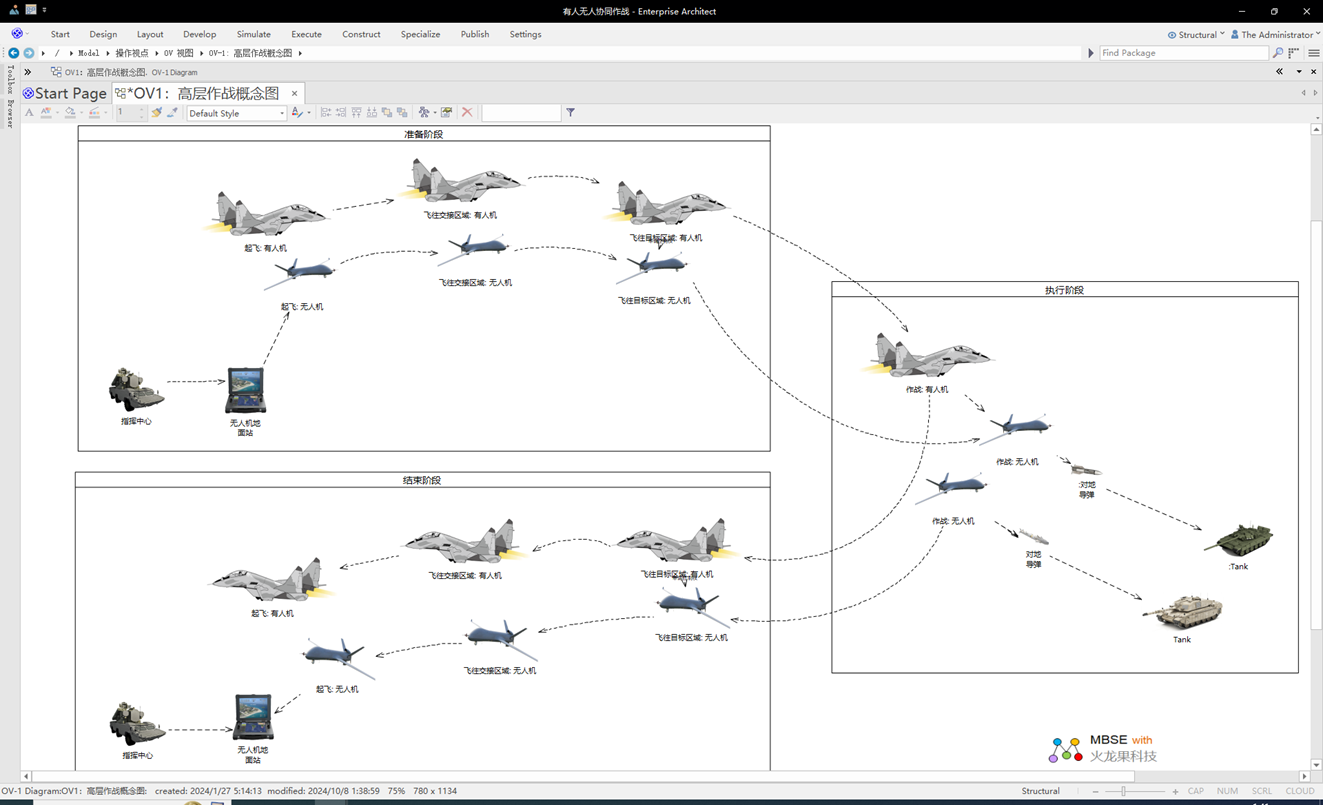
3.操作视点 操作视点描述了指导操作所涉及的任务、活动、操作要素以及资源流交换。 3.1 OV-1 高级操作概念图 OV 1 从操作者视角描述架构相关的概念、主题结构、上下文以及和外部系统之间的交互。 如下是 OV1 的模型示例(采用建模工具 EA, 有人无人协同系统 ):
3.2 OV -2 操作 资源流 描述 OV2 描述在操作活动和执行角色之间的资源流的需求,资源流可以是:信息,能量,物质,资金、人员和物资。如下是有人无人协同系统的 OV-2 图例 (采用建模工具 EA, 有人无人协同系统 ):
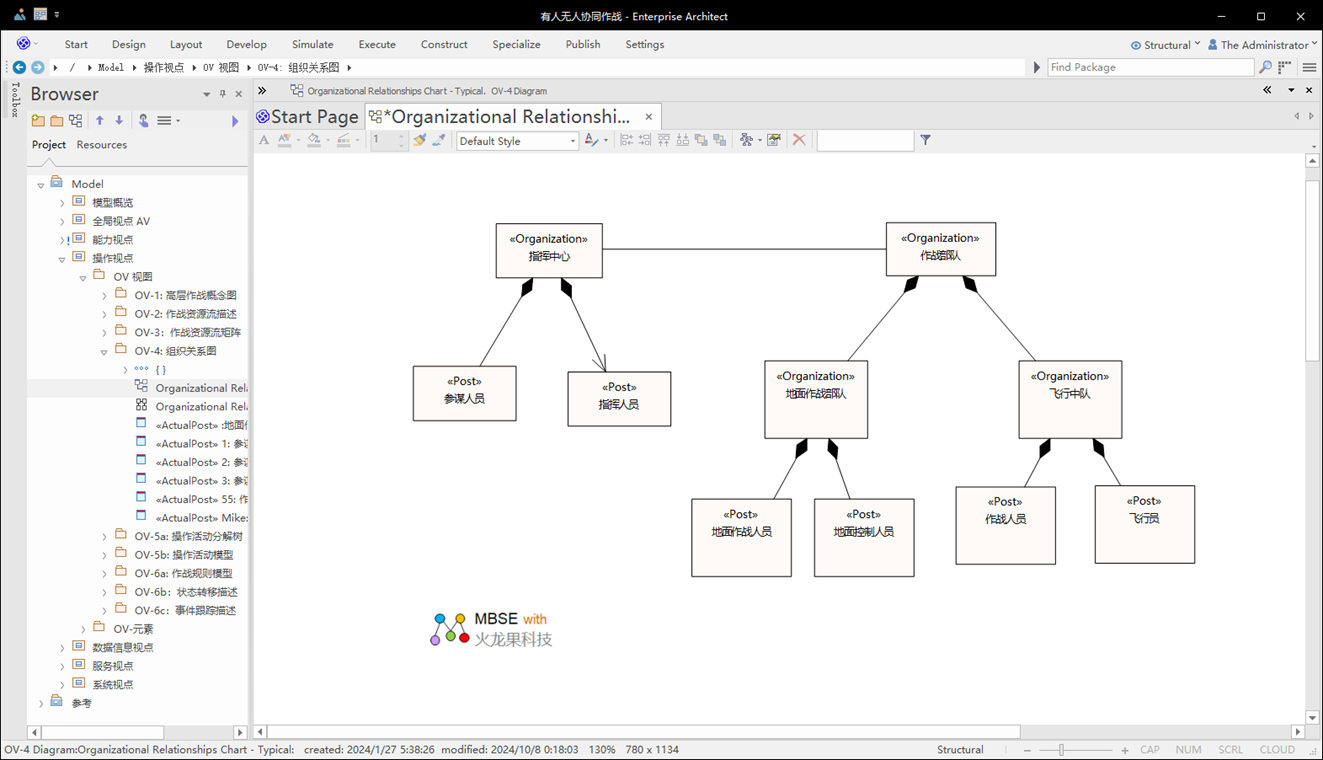
3.3 OV-4 组织关系图 组织关系图描述人的组织关系,有 2 种级别: - 面向角色的,把具体的人或者组织抽象成角色,描述角色之间的组织关系。
- 面向实例的,描述具体的人或者组织的关系。
如下是有人无人协同系统的 OV-4 图例: - OV-4a 组织关系图 - 基于角色 (采用建模工具 EA, 有人无人协同系统 ):
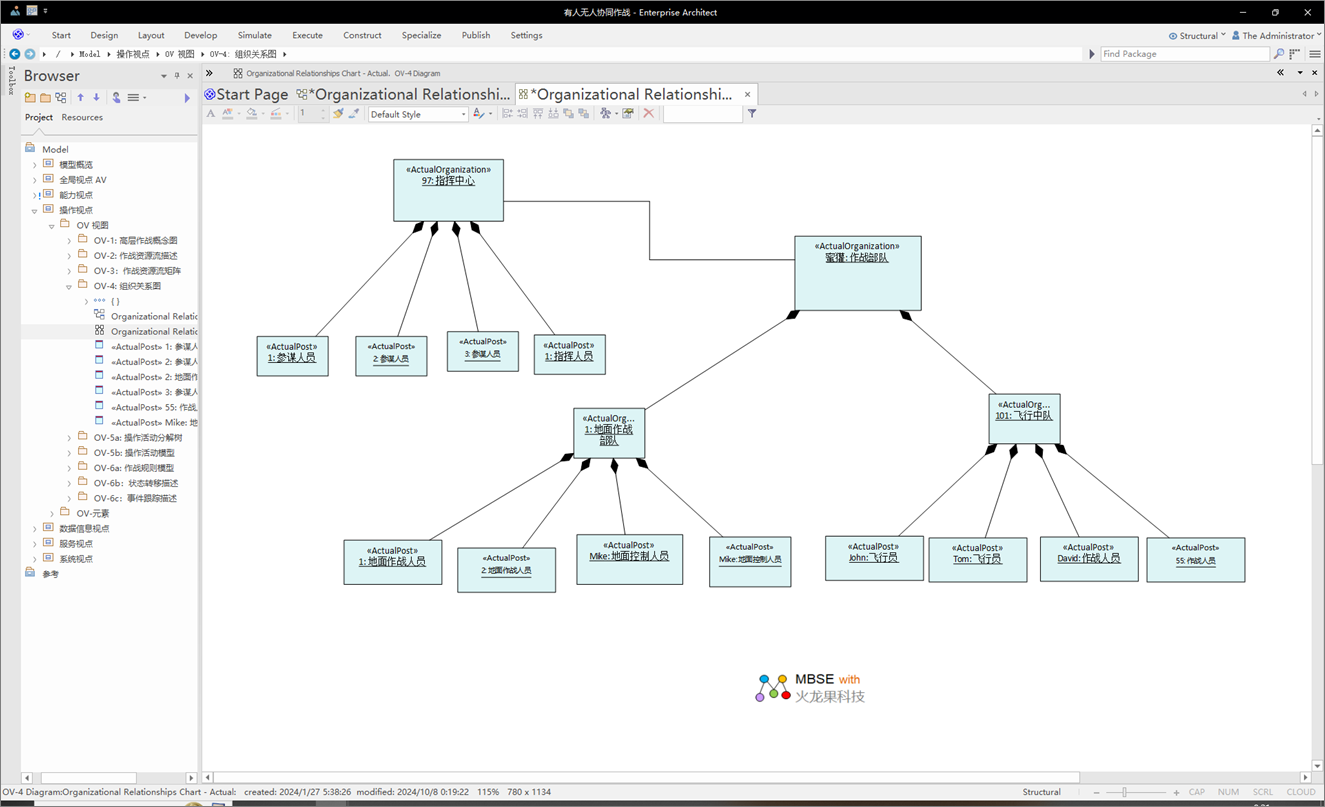
组织关系图 - 类型级别 - OV-4b 组织关系图 - 基于实例 (采用建模工具 EA, 有人无人协同系统 ):
组织关系图 - 实例级别 3.4 OV5 操作活动 OV-5 描述了在实现任务或业务目标的过程中通常进行的操作。
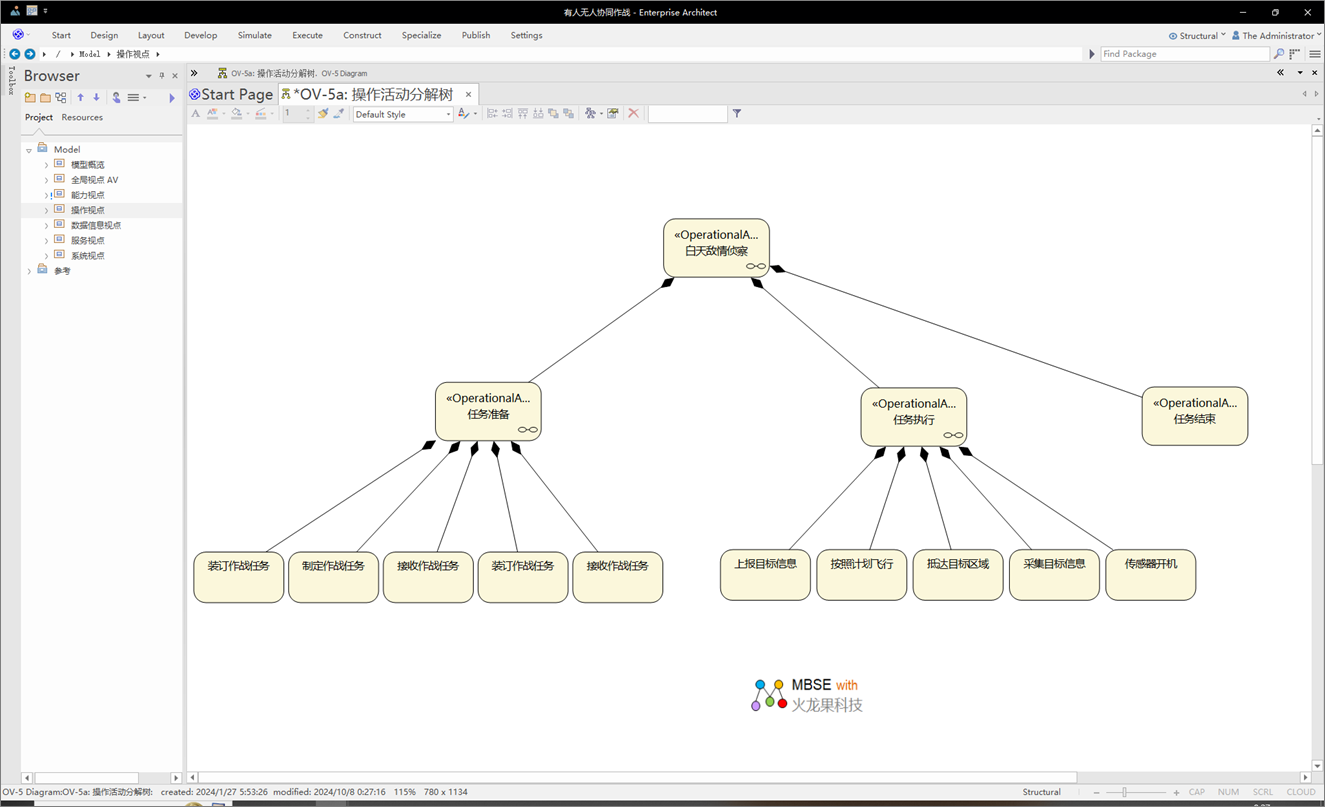
3.4.1 OV-5a 操作活动分解树 OV 5a 对活动进行结构化分解,从而形成可管理的活动层次结构。
OV-5a 的图例(采用建模工具 EA, 有人无人协同系统的 ):
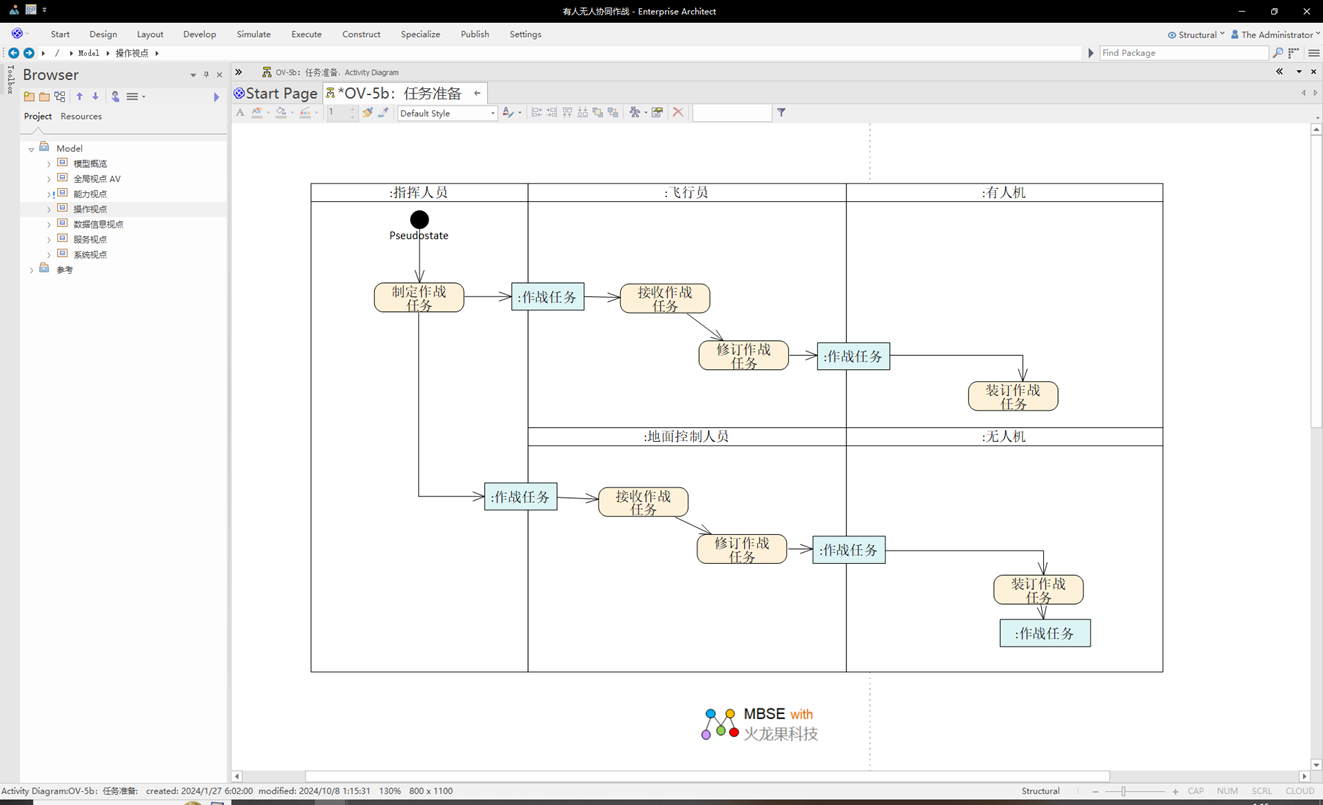
3.4.2 OV-5b 操作活动模型 OV-5b 描述操作活动之间的时序和输入 / 输出的资源流关系,以活动图 / 流程图的方式描述。 如下是 OV-5b 操作活动模型 的图例(采用建模工具 EA, 有人无人协同系统 ):
3.5 OV -6 动态行为模型 对于操作活动可以进一步采用动态行为模型进行描述。
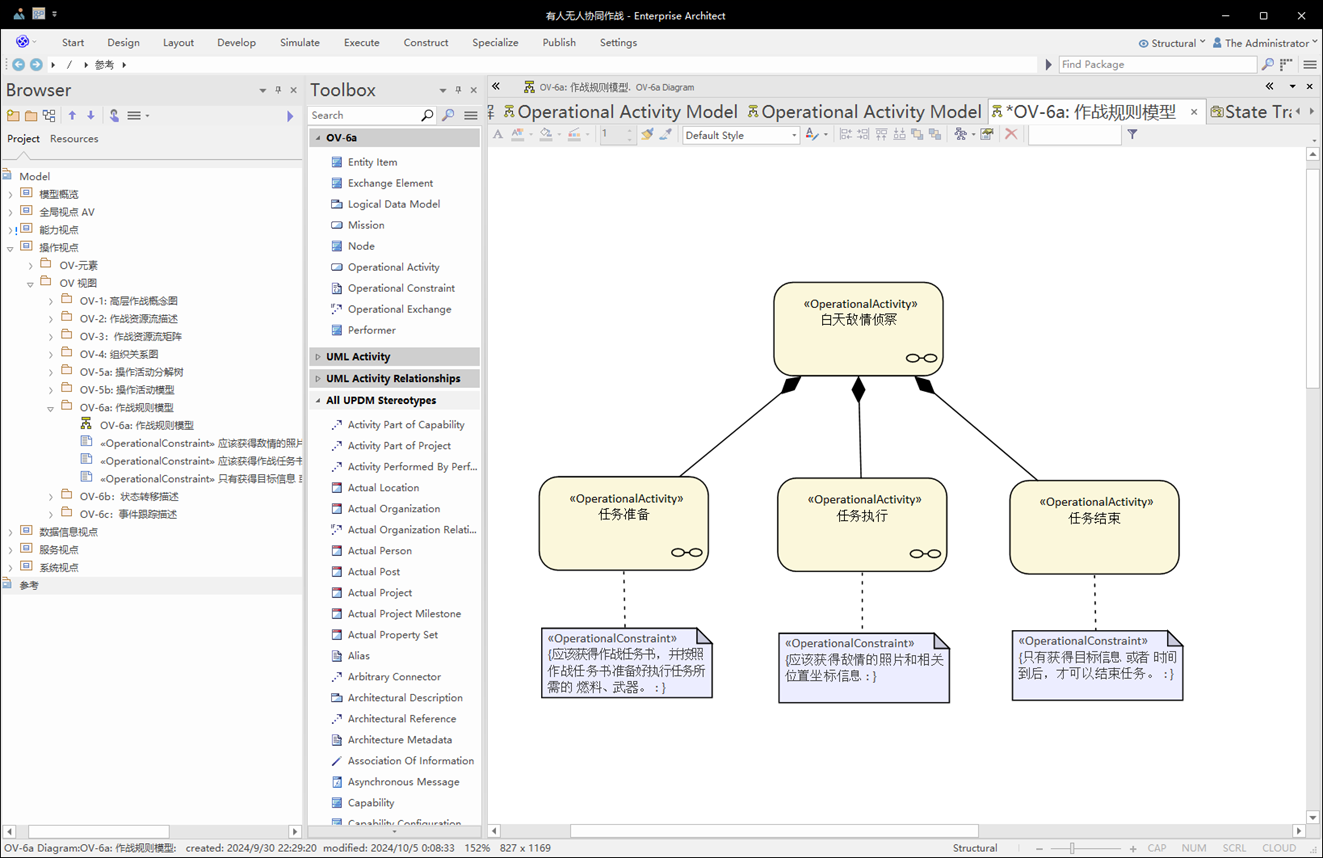
3.5.1 OV-6a 操作规则模型 OV-6a 限定了操作规则,这些规则是操作的约束。 如下是 OV-6a 操作规则模型 的示例(采用建模工具 EA, 有人无人协同系统 ):
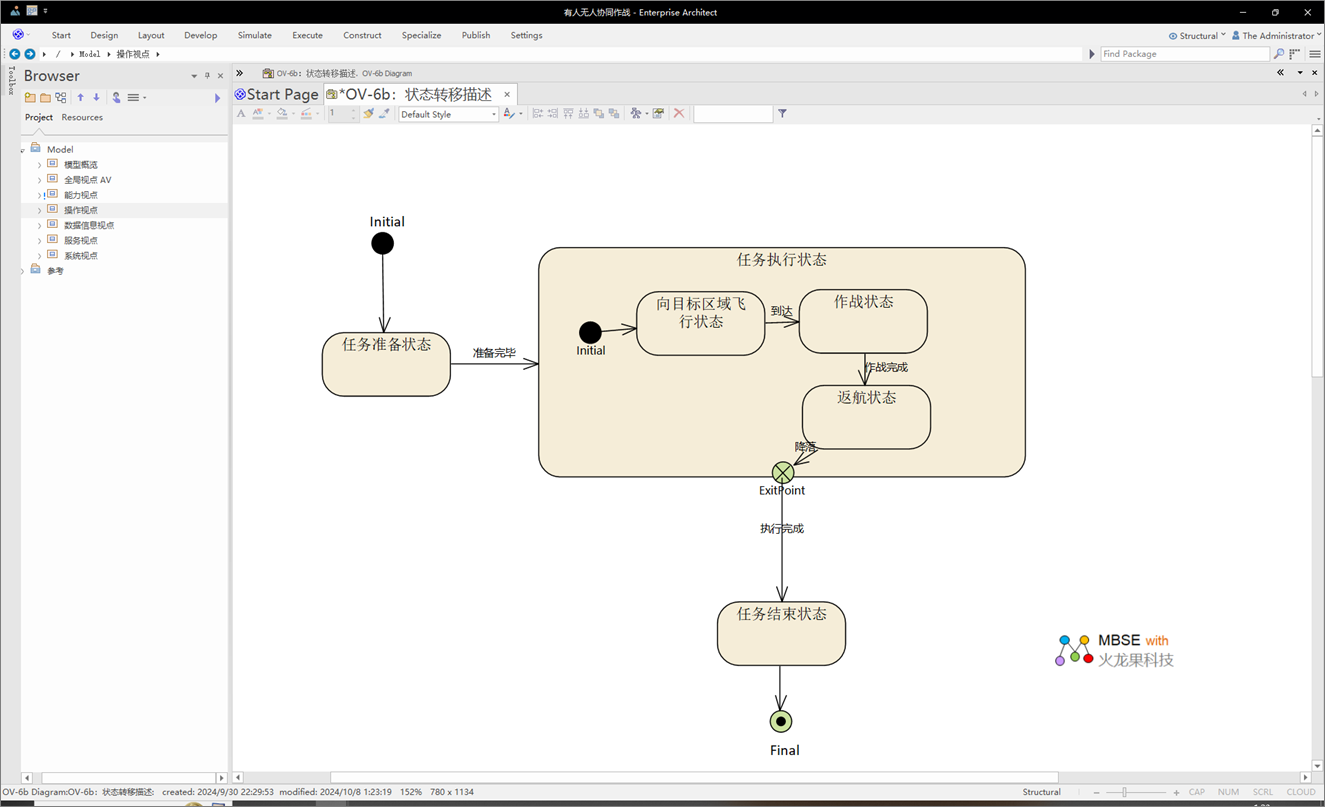
3.5.2 OV-6b 状态转换说明 OV-6b 是一种描述操作活动如何通过改变其状态来响应各种事件的图形方法。 如下是 OV-6b 状态转换说明 的示例(采用建模工具 EA, 有人无人协同系统 ):
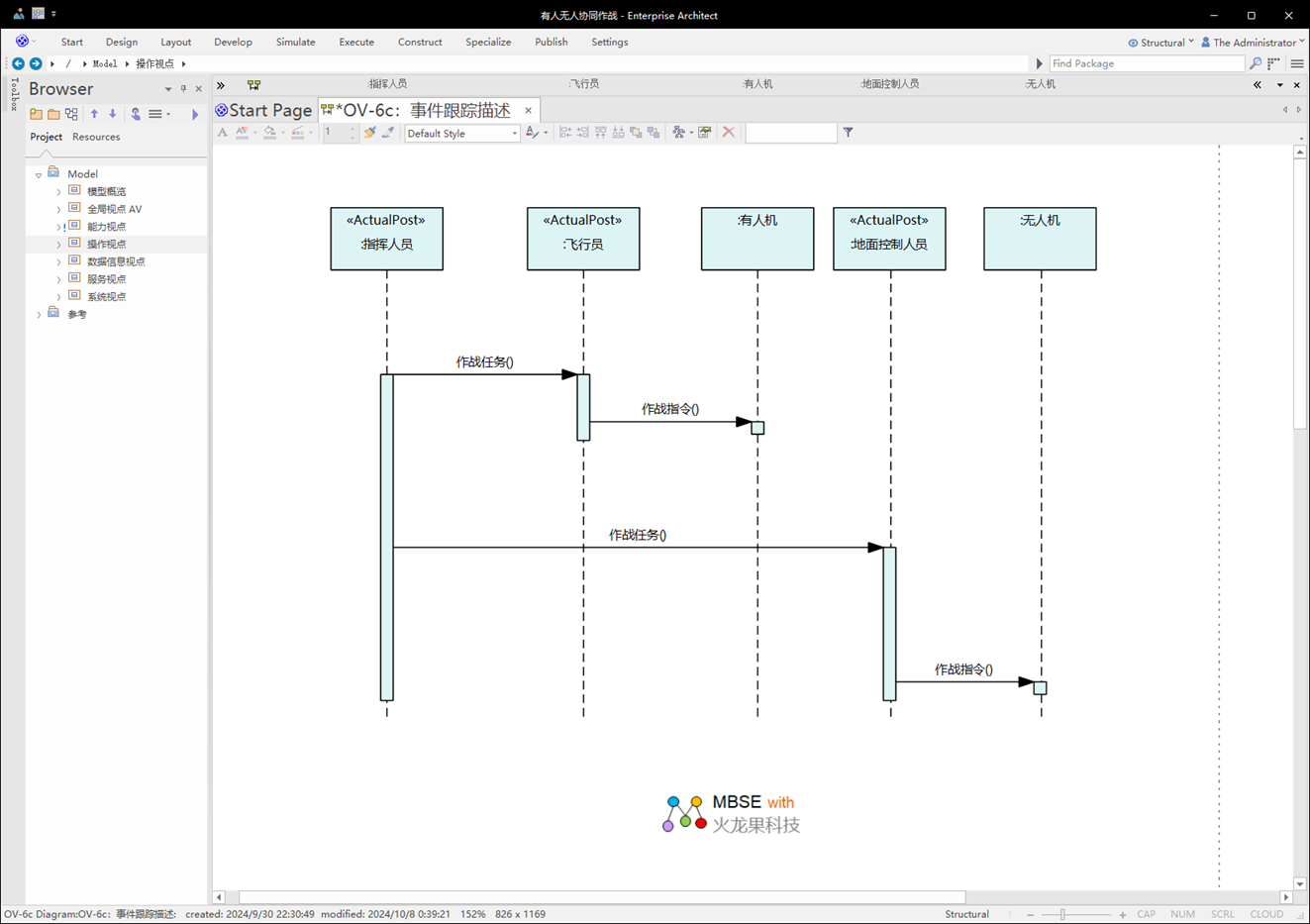
3.5.3 OV-6c 事件跟踪描述 OV-6c 采用顺序图的方式描述特定场景中各个操作节点按照时间顺序进行的消息交互。 OV-6c 事件跟踪描述 的示例如下(采用建模工具 EA, 有人无人协同系统 ):
4. 服务视点 服务视点中的模型描述 服务以及服务之间的链接、服务具有的功能。服务模型关联服务资源到能力和操作需求。这些服务支持操作活动和信息交换。
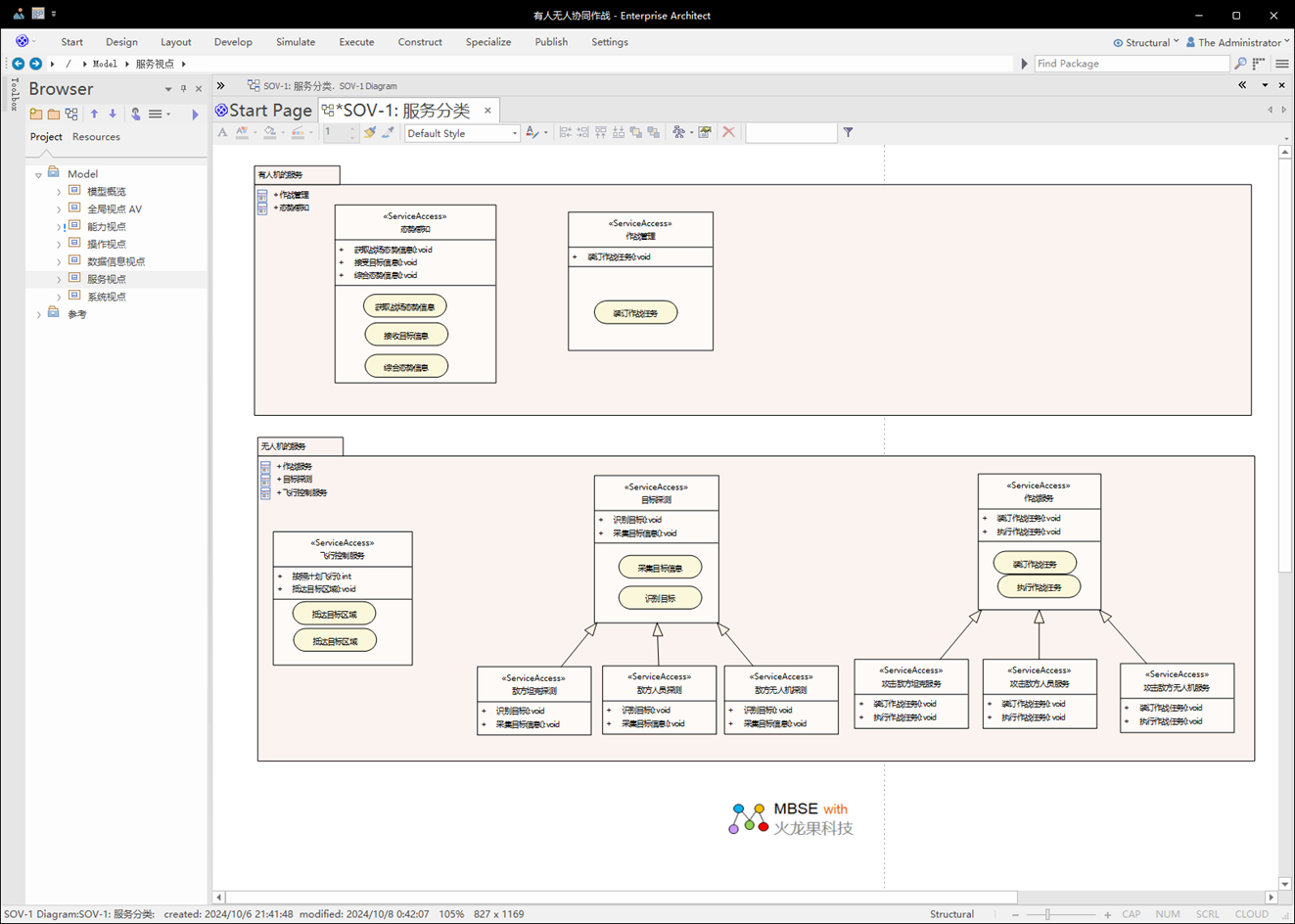
4.1 SOV-1 服务分类 SOV-1 ( 服务分类视图 ) 定义了服务规格(也就是服务接口)的分类层次结构。 如下是 SOV-1 服务分类的 示例(采用建模工具 EA, 有人无人协同系统 ):
后记
希望您读了此文后有所受益.
如果您有经验乐于分享,欢迎投稿给我们,如果您对我们的培训、咨询和工具感兴趣,欢迎了解:
• 建模工具: EA
• MBSE 平台: iSpace
• 模型 web 浏览工具: WebEA
• 课程: 基于SysML和EA进行系统设计与建模
• 课程: 基于UML和EA进行系统分析设计
• 咨询方案: MBSE( 基于模型的系统工程 )
• 咨询方案: 基于 UML 的模型驱动的开发
• 所有建模有关的课程: http://www.modeler.org.cn/course/index.asp
• 咨询方案: 基于模型的工程管理
如果您希望了解更多信息:
作者简介:
| 俎涛,火龙果软件工程创始人, 2001 年创立了火龙果软件工程, 2004 年创立了 IBM Rational 用户组. 1998 年,曾作为骨干参与国家重点研究课题《面向特定领域基于组件的软件复用》,有幸比较深入的学习和使用的 UML 进行领域建模、提炼可复用组件和架构.在后来的研发项目中,一直采用模型进行分析设计,积累了一些心得和经验.在以往的经历中,最大的感触是汇聚了很多精英人才的软件工程和系统工程领域居然几十年都是一种凌乱迷蒙的状态,从自己的经历所得,觉得清晰的模型,才是拨开工程迷雾的关键所在,所以不断研究和应用各种建模技术,并从自己的工程实践中提炼经验,形成对于自己可持续的方法论,例如《 Nature Model Language- 自然建模语言》《基于模型的三维研发管理》《 iProcess 过程改进方法》《基于模型的需求管理》《模型驱动的架构设计》《基于模型的质量管理》《基于模型的人员能力管理》,目前正在作为产品经理和架构师,进行 MBSE (基于模型的系统工程)平台的研发,希望建立要给基于模型的工程解决方案,后续会不断写些文章,希望能给同行一些借鉴.
|
|