| 编辑推荐: |
| 本文来自于中国航空新闻网,本文基于某型无人机飞行控制系统的研发实践,在系统设计过程中对MBSE流程进行了适应性剪裁和改进。 |
|
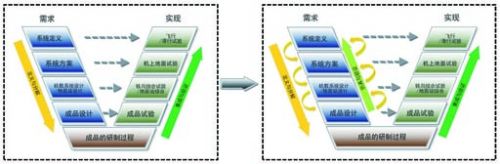
图1 无人机系统“传统的研制流程”与“基于模型的研制流程”。
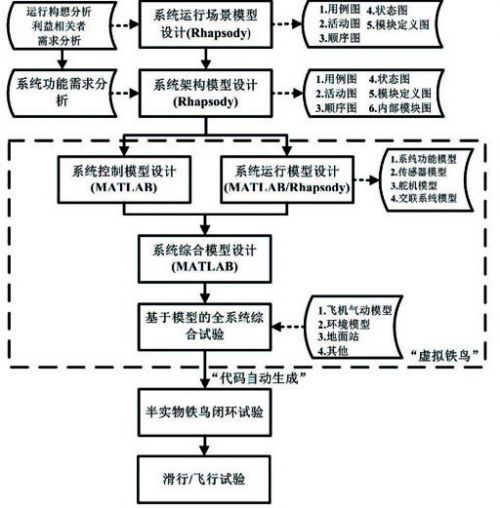
图2 基于模型的飞行控制系统研制流程示意图。
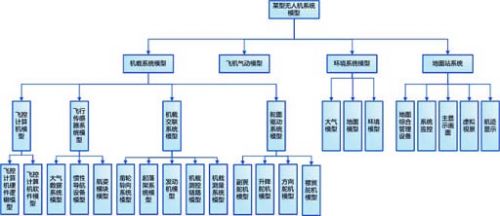
图3 某型无人机系统模型架构图。
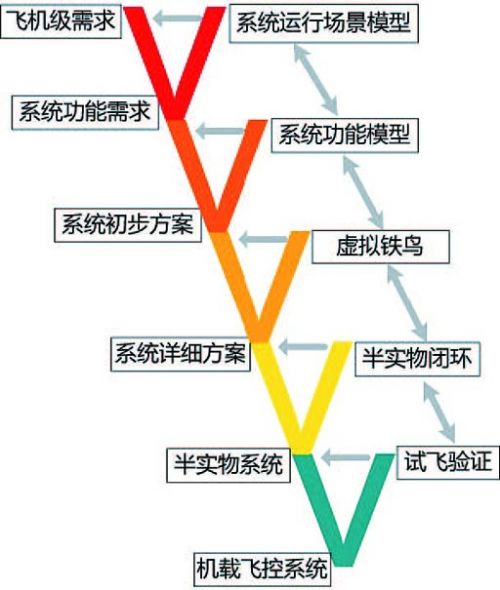
图4 基于模型的验证过程与全系统模型集成验证试验构型。
随着无人机技术的飞速发展,作为机载安全关键系统的飞行控制系统的设计面临着诸多问题,一方面是飞行控制系统本身的复杂程度越来越高,如何改进传统的开发流程以提高设计效率成为一个关键问题;另一方面是系统的研制周期越来越短,设计需求迭代越来越频繁,各个子系统的技术研发团队如何在系统设计的初期进行快速系统设计并进行综合验证,也是无人机研制所面临的难题。
为了解决机载系统快速原型设计的难题、提高系统的研发效率,国内外专家、学者和工程人员开展了很多相关的研究。空客公司采用基于模型的系统工程(MBSE)流程来开展A350全生命周期阶段的研发;美国航空航天局(NASA)也积极推进MBSE在航天领域中的应用;国内一些主机单位和研究机构都已经逐步开始应用MBSE的方法。中国航空工业集团公司在2013年成立系统工程信息化推进委员会,选用IBM
Rational系列产品作为系统工程信息化的支撑工具,全面推进MBSE在航空领域中的应用,MBSE的研究与应用正在国内外迅速的发展和推广,已成为系统工程界的研究和应用的热点。
本文基于某型无人机飞行控制系统的研发实践,首先建立了无人机系统的运行场景模型,完成了利益相关者需求分析,在此基础上开展系统架构模型设计,完成系统运行模型与系统控制模型综合,结合飞机动力学模型、环境模型、地面站系统等,实现了基于模型的全系统综合集成试验。最后使用自动代码技术生成机载软件,加载到飞行控制计算机中,完成了半实物铁鸟综合试验、滑行及飞行试验。
一、无人机飞行控制系统
某型无人机飞行控制系统以飞行控制计算机为核心,包括传感器部件、运动舵机、测控链路等,可以实现自主起飞与返场着陆、自主执行任务,主要功能包括三轴控制增稳和姿态保持、自主导航、机载系统管理、应急处置等,主要机载设备包括飞行控制计算机、捷联惯导、大气数据系统、舵机、测控系统、测量采集系统、起落架系统、前轮转弯系统、发动机等。
二、基于模型的飞行控制系统
研发流程
1.与传统飞行控制系统研发流程的对比
传统的飞行控制系统的研制通常需要经历系统定义、系统方案、系统设计、分系统设计、成品研制、分系统验证、系统综合验证、滑行/飞行试验等,各个阶段相互衔接,系统信息自上而下传递。在整个研发过程中,由于设计初期缺乏有效的设计验证方法,通常会发生信息的逆向反馈,从而进行技术更改优化,在研制周期内反复循环迭代。对新研系统,系统需要开展硬件原理样机的研制,在系统进行综合试验时,才能发现系统设计需要纠正或改进的部分。最终的系统设计需要多次“设计-实现-验证”的迭代来完成,整个无人机系统的研制流程如图1左所示,系统级的功能需求只能在研制后期软硬件综合阶段(如“铁鸟综合试验/地面站综合”阶段)才能验证,而地面站与机载系统的接口逻辑需要在“机上地面试验”阶段才能进行验证。
基于模型的飞行控制系统研制如图1右所示,使用模型在整个研制周期内进行信息传递,建立模型与系统需求之间的连接关系,在V型图的左边的各个阶段都可以进行模型仿真验证,确认系统设计与需求的符合性,验证系统需求是否满足利益相关者的原始需求,在系统设计初期即进行系统功能行为、机载系统与地面站接口与控制逻辑综合等验证,可以极大地提升系统早期的设计成熟度,减少后期验证带来的设计反复和风险,从而降低系统开发与试验的时间、人力、物力成本。
2.基于模型的飞行控制系统设计实践
无人机飞行控制系统的研发除了需要遵循基于模型的系统研制流程外,还具有自身的特点。本文根据系统运行构想分析、利益相关者需求分析,构建了系统运行场景模型,梳理出飞行控制系统的功能/性能需求。根据系统功能/性能需求,开展系统架构模型设计、系统运行模型与控制模型的设计,并使用了模型接口将系统运行模型与系统控制模型进行综合,结合飞机动力学模型、环境模型、地面站系统等,形成了具有“虚拟铁鸟”特征的无人机飞行控制系统虚拟测试环境,开展了基于模型的全系统综合集成试验。系统功能/性能模型完成所有验证后,使用自动代码生成技术实现机载系统模型到机载代码的自动转换,加载到飞行控制计算机中,完成了半实物铁鸟综合试验、滑行/飞行试验。整个基于模型的飞行控制系统研制流程如图2所示。
本文在系统运行场景模型和系统架构模型设计时,使用了SYSML语言和IBM Rhapsody工具,而在系统运行模型和系统控制算法时,则使用了MATLAB/Simulink/Stateflow进行设计。
三、基于模型的飞行控制系统设计
1.飞行控制系统运行场景建模
运行使用构想用于描述系统在全寿命周期各阶段如何运用以满足利益相关者的期望。它从使用的角度描述系统的特征且促进对系统目标的理解,是获取利益相关者期望、需求和确定系统结构的重要来源,是系统中与用户相关联的需求开发和系统设计的出发点。在某型无人机飞行控制系统研制过程的设计初期,本文以飞行操作员、地面监控人员、机务人员等利益相关者需求为驱动,分析无人机系统的运行场景,包括飞行、滑行、维护等场景,对每一个场景用例,分别针对每一个利益相关者进行了分析,构建了运行场景的活动图、顺序图等模型,完成了对无人机系统需求的准确捕获并确认。
2.系统功能架构建模
飞行控制系统功能架构建模是基于前一阶段的系统运行场景模型,综合考虑所有利益相关者需求,将系统拆分成内部子系统及组件,对每一个用例按子系统进行功能分解与分配,从系统内部组成梳理系统的功能及内外部接口关系,识别系统与外界、子系统内部的交互,完成系统的状态行为定义,并通过模型的执行对需求进行验证与确认,最后形成完整的系统功能模型。系统功能需求在这一阶段进一步细化、分解、完善,并捕获缺失的系统需求,最终形成飞行控制系统架构模型及运行模型,包括系统的模块图、流程图、状态图等。传统飞行控制系统设计的系统详细设计方案、接口控制文件、通信协议、软件功能需求等文件在本阶段由模型替代,并在层次性、完整性、准确性上得到了极大的增强,显著的提高了系统设计的效率和质量。
3.控制律模型设计
该无人机控制律的设计贯穿于无人机从发动机开车、滑行、起飞、爬升、巡航、执行任务、返航、下降、自主着陆,以及飞行中故障情况下应急处置的整个飞行过程,并保证具有良好的飞行品质,特别应保证在执行任务阶段的平稳性要求,包括自主飞行管理、三轴控制增稳、自动油门、姿态保持、四维导航、自动起飞及进场着陆等主要功能。该无人机控制律设计采用MATLAB/Simulink作为统一设计平台,设计环节基于系统需求进行模型的设计,在建模过程中定制了大量可重复使用的算法模块库,复杂逻辑采用Stateflow基于状态机进行建模,实施环节通过自动生成代码实现从设计到实施的过渡,主要采用了标准模型设计、模型接口管理、基于脚本的项目配置、自动代码生成等技术。
4.系统综合模型设计
为了实现基于模型的全系统集成试验,本文构建了无人机系统综合模型,包括机载系统模型、飞机气动模型、环境系统模型、地面站系统等。其中,机载系统模型包括飞控计算机模型、飞行传感器模型、机载交联系统模型、舵面驱动系统模型;飞机气动模型采用了飞机气动数据库进行构建;环境系统模型主要包括大气紊流模型、地面模型、环境模型等;而地面站系统则使用了该型无人机的真实地面站系统。飞控计算机核心功能逻辑、控制律算法是飞行控制系统建模的核心,围绕系统功能模型/控制律模型/飞机模型/传感器模型,采用真实地面站系统对飞行控制系统模型进行综合集成试验,验证并确认了该型无人机系统的内/外部接口及全部功能逻辑。图3是某型无人机系统模型架构图。
四、基于模型的飞行控制系统验证
在基于模型的飞行控制系统研发过程中,本文对系统研发每个阶段的设计结果进行了验证。对系统运行场景模型的验证,确认系统功能满足飞机级需求;对系统功能模型的验证,确认系统架构、接口、状态逻辑满足系统级需求;建立“虚拟铁鸟”模型驱动闭环飞行试验环境,确认机载系统模型/控制律模型/地面站系统等的功能/性能/接口;经过“虚拟铁鸟”验证后的模型,使用自动代码生成技术,加载到飞行控制计算机中,进行半实物闭环测试,完成硬件在环测试;最后完成了该型无人机系统的试飞验证。
在系统研制过程中,模型逐级往下传递,本文采用Rhapsody和Maltlab等工具完成了运行场景模型和系统功能模型的设计与仿真验证。在模型集成综合阶段,采用了Matlab/Simulink作为模型运行平台,将Rhapsody建立的模型通过Stereotype(S
Function)接口导入到Matlab/Simulink中,完成了模型综合集成验证,并基于综合模型建立了飞行控制系统“虚拟铁鸟”,开展基于模型的飞行控制系统/地面站/试验环境的联合试验,在初步设计阶段即对系统完成了集成验证与虚拟飞行试验,确认了全系统功能/性能满足飞行控制系统的研制需求。基于模型的试验验证过程和全系统集成验证试验构型如图4所示。经过前期充分验证后的机载系统,在半实物试验/机上地面试验/试飞验证过程中,相较于传统的型号研发,减少了很多不必要的设计反复迭代,缩短了试验验证周期,显著地减少了物理试验的次数和成本。
五、结论
首先在系统设计的初期,建立了无人机系统的运行场景模型,完成了利益相关者需求分析及建模仿真,然后在运行场景模型的基础上,开展了机载飞行控制系统功能需求的建模,同时设计了一套可验证飞行控制系统模型的试验环境,构建了该型无人机系统的“虚拟铁鸟”,完成了基于模型的飞行控制系统与无人机地面站的全系统闭环飞行试验,并通过模型自动代码生成技术,实现了机载软件的快速设计。基于模型的全系统集成研发平台的建立,有效地改进了现有的飞行控制系统设计流程,在设计前期完成了系统/控制律/地面站的虚拟飞行试验,形成了一种基于模型的系统研发模式和设计流程,大量减少了真实物理试验的次数,提高了系统早期的设计成熟度,显著地提升了该型无人机系统的研发效率。
|





