| ǰ��
���Ĵ����ݣ�ժ��docker�ٷ��ĵ�.Understand images, containers,
and storage drivers
����û�в�ȡԭ�ķ���ķ�ʽ,���ǽ���Լ���ѧϰ�����˹����ܽ�.
Ҫ������������docker�Ĵ洢��������Ҫ���˽�docker��������ι����ʹ洢���Լ��������ʹ�þ���.
������ֲ�
������ubuntu:15.04�ľ���ֲ�.һ���ǣ���,ÿһ�㶼��һЩֻ���������ϵͳ������ļ����.
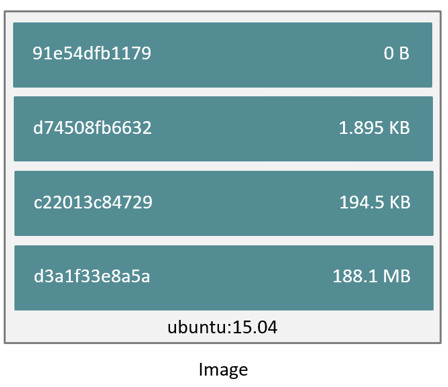
��������ͼ�Աȣ����������Ŀ�������ֲ��ϵ����ͼ�ǹٷ��ĵ�ͼƬ�����Կ��������С�����˾�����ubuntu:15.04����ķֲ�ṹû�䣩 
Docker�洢���������þ���:����Щ�ֲ�ľ����ļ��ѵ������������ṩͳһ����ͼ.ʹcontainer���ļ�ϵͳ����ȥ��������ͨ���ļ�ϵͳûʲô����.
������һ���µ�������ʱ��,ʵ�������ھ���ķֲ�����������һ��container layer�������㣩.֮�����ж�������������,ʵ�ʶ�ֻӰ����һ��. 
ע��
�����㣺��д��(��д��)
����㣺ֻ����
������ֲ�
������������һ����Ҫ������ǣ��Ƿ���ж���Ķ�д��(��д��).����һ�������������������ģ����洢�ڿ�д��.����ɾ��һ��������ʱ��д��Ҳ����ɾ��(ע��:��д�������ݾ�������).Ȼ��������DZ��ֲ����.
��ͼչʾ�ˣ������������һ������.�������ֻ����,�����.�����������ͬһ�������֮�ϣ���������������Ӱ��.

docker �洢������ְ����ǽ������Ϳ�д�������������.��ͬ������ʵ�ֹ����ķ�ʽҲ��һ��.ʵ�������뾵������������ؼ��������ǿɶѵ��ľ�����copy-on-write
(CoW��дʱ����).
����дʱ����
�ٸ����ӣ�С�ĺ�С���ɲ�ͬ����ʦ����ѧ�Σ���������ֻ��һ��ϰ���.С�ĵ���ҵ�ǣ���ϰ��ĵ�ʮһҳ.Ϊ�˲�Ӱ�쵽С�䣬С�ĵ������ǽ���11ҳcopy�������ҵ���Ͻ�.�����һ�����͵�дʱ����
��һ����һ���ļ�,����ļ����Ȼ�Ӹö�д�������ֻ���㸴�Ƶ��ö�д�㡣���ļ���ֻ���汾��Ȼ���ڣ������Ѿ�����д���еĸ��ļ����������ء�
�˽���дʱ���ƣ���Ӧ��ע��һ�����⣺�����һ���ľ�����ڰ������ļ����ļ���size�ܴ�.����ɴ����Ĵ���IO�Ŀ���.���Բ����齫��Ҫ�ĵĴ��ļ������ɵ�������.���Բ������ݾ��ķ�ʽ.
���ݾ���洢����
��һ������ɾ����ʱ��,д����������������ݽ���ɾ��(���˱��������ݾ��е�����)
���ݾ��ǹ��ص�������,docker�������ϵ�һ��Ŀ¼���ļ��������ݾ����ļ���д�Dz��ܴ洢�������Ƶģ��ӽ��ڱ����ļ�ϵͳ��д�ٶ�.���Թ��ض�����ݾ���һ������.Ҳ���Զ����������һ���������ݾ�.
��ͼ��ʾ:һ��docker���������У���������ÿ���������Լ��Ĵ洢�ռ䣬�洢�������������ļ�ϵͳ��/var/lib/docker/��
������һ�����������ݾ��� /data.���ص�����������ʵ�ֹ���. 
���ѡ��洢����
dockerĿǰ֧�ֵĴ洢������:OverlayFS,AUFS,Btrfs,Device Mapper,VFS,ZFS��
docker�Ĵ洢����Ŀǰ��û��һ��ͨ�õģ������ģ����������л����Ĵ洢����.������Ҫ�����Լ��Ļ���������ѡ��.
�洢�����ڲ��ϵĸĽ��뷢չ
������ȶ����ϵĿ������ڰ�װdocker��ʱ���Ĭ�ϸ������ϵͳ��������ѡ��һ���洢����.ͨ����˵ʹ�����Ĭ�ϵ�����������������bug�Ļ���.
�������Ŷ�ʹ�ù�RHEL������ط�֧,������й���LVM��Device Mapper�ľ���.��ʱ������ʹ��devicemapper�洢����.
�鿴��ǰdocker ����Ĵ洢����
#docker info
Containers: 0
Running: 0
Paused: 0
Stopped: 0
Images: 24
Server Version: 1.10.2
Storage Driver: aufs
Root Dir: /var/lib/docker/aufs
Backing Filesystem: extfs
Dirs: 52
Dirperm1 Supported: true
|
��ͼ��ʾ���洢��������Ϊaufs,�������ļ�ϵͳ�ĸ�ʽΪextfs��
�洢�������������ļ���ʽ

����docker�Ĵ洢����
����һ:�����ô洢����������Ϊdevicemapper
$ dockerd --storage-driver=devicemapper & |
������:�����ô洢����������Ϊdevicemapper����DOCKER_OPTS���ò������������ϨCstorage-driver=devicemapper
vim /etc/default/docker
DOCKER_OPTS="<����������> --storage-driver=devicemapper" |
��״��δ��
��������ΪOverlayFS��Docker�洢������δ��.Ȼ��,����Ȼ��������.�ȶ�����Ҳ����һЩ����Ĵ洢�������磺AUFS��devicemapper.
�����ͼ������ʾ��ÿ���洢�����������Լ����㣬��ο��� 
���嵽ijһ���洢����
�ⲿ�ֽ��ܾ���Ĵ洢������ʵ�ַ�ʽ,���ڼ����о��߿��Բο�ѧϰ.����Ӧ��ʵ���ߣ�������ʱֹ��.���߿����ⲿ�����ݣ�û�н��з����ܽ�.���´��Ժ����.
AUFS
Docker and AUFS in practice
device mapper
Docker and the Device Mapper storage driver |