|
本文我将对一致性算法作介绍,同时谈谈自己对一致性hash和一般意义上的hash算法的区别
hash是什么
hash即hash算法,又称为散列算法,百度百科的定义是 哈希算法将任意长度的二进制值映射为较短的固定长度的二进制值,这个小的二进制值称为哈希值。哈希值是一段数据唯一且极其紧凑的数值表示形式。 1.这句话有几个很重要的地方,首先是任意长度二进制,在java中,可以代表所有对象(序列化) 2.固定长度,使得hashmap等可以按照高低位进行位操作,同时能够提供统一的方式(有种协议的感觉) 3.数据唯一的数值,使得hashcode可以作为查找的依据(快速查找的根本)
为什么hash
说为什么首先要说说如果没有会怎么样。
csdn有这样一篇文章讲的很有意思,我们有一堆猪,怎么根据体重找到对应的一头。如果没有hash的思想,我们会比较每头猪,但是如果有1000头你也这样做么。引入hash,每头猪的重量hash到一个hashcode,hashcode会映射到对应的猪圈,我们只要比较每个猪圈的猪就行了,而最理想的情况就是每个猪圈的猪都一样多(注:每个猪圈一个是好,但是空间消耗巨大) (http://blog.csdn.net/ok7758521ok/article/details/4003476) 而java中,hash也是采用这样的方式,通过hashcode与桶数取模的方式(当然时间是通过位操作,性能更高)自然映射到具体的桶中。
关于分布式存储
当hash遇上分布式,单台机子的hashmap存储已经不能满足我们的key-value需求,怎么办,我们需要把存储内容分布到不同的实体机上,这时需要一种把key映射到不同机器的方法,我们想起了hash,可以把实体机当做是桶,采用和hashmap实现一样的思路,通过和实体机的数量取模,自然映射到不同的机器。 ok,搞定,分布式确实可以实现。但现在问题来了,如果其中一台机子挂了,或者又加了一台机子怎么办,这时出现两种情况: 1.不做任何改变,那么挂了的数据将无法得到恢复,新增的机子也无法得到利用 2.rehash 这种情况,桶的数量将会改变,所有的值将重新映射,最终数据会得到存储,这有两个问题,rehash的时刻,所有key将重新映射,这时,对于大并发的情形,是灾难的,所有请求将不经过任何缓存,服务器面临崩溃的风险,再者,老的数据依然还在,并且不会被用到,浪费存储空间。
那么,怎么办
引入一致性hash
consistent hashing 是这样一种 hash 算法,简单的说,在移除 / 添加一个 节点(机器,ip)时,它能够尽可能小的改变已存在
key 映射关系,尽可能的满足单调性()的要求。
hash回环
任何的hash值都是固定长度的,因此可以通过一个回环来承载所有的hash值(为什么用环后面会说)

映射
hash最总要的一步就是把对象映射到对应的桶,而与通常的hash做法相比,一致性hash会比较特殊,一致性hash不会将key直接映射到桶,而将key和桶分别映射到回环的对应hash值节点

映射key 
映射桶 接下来是最重要的一步,把key映射到对应的桶 寻桶 现在 cache 和对象都已经通过同一个 hash 算法映射到 hash 数值空间中了,接下来要考虑的就是如何将对象映射到
cache 上面了。 在这个环形空间中,如果沿着顺时针方向从对象的 key 值出发,直到遇见一个 cache ,那么就将该对象存储在这个
cache 上,因为对象和 cache 的 hash 值是固定的,因此这个 cache 必然是唯一和确定的。这样不就找到了对象和
cache 的映射方法了吗?!
依然继续上面的例子(参见图 3 ),那么根据上面的方法,对象 object1
将被存储到 cache A 上; object2和 object3 对应到 cache C ; object4
对应到 cache B ;
好处
我们讲了这么多一致性hash的算法,那么他究竟带来了什么,我们分添加和删除的情况考虑
添加
我们添加一个新的节点D,按照顺时针的方式,原先映射到C的object2会映射到D,而object3则还是映射到C,这样添加只会影响到object2,事实上是B和D之间的对象,这种影响相比传统的方式,影响是很小的
删除
与添加类似,删除也只会影响A和B之间的对象
虚拟节点
考量 Hash 算法的另一个指标是平衡性 (Balance) ,定义如下: 平衡性 平衡性是指哈希的结果能够尽可能分布到所有的缓冲中去,这样可以使得所有的缓冲空间都得到利用。 hash 算法并不是保证绝对的平衡,如果 cache 较少的话,对象并不能被均匀的映射到 cache
上,比如在上面的例子中,仅部署 cache A 和 cache C 的情况下,在 4 个对象中, cache
A 仅存储了 object1 ,而 cache C 则存储了 object2 、 object3 和 object4
;分布是很不均衡的。 为了解决这种情况, consistent hashing 引入了“虚拟节点”的概念,它可以如下定义: “虚拟节点”( virtual node )是实际节点在 hash 空间的复制品( replica ),一实际个节点对应了若干个“虚拟节点”,这个对应个数也成为“复制个数”,“虚拟节点”在
hash 空间中以 hash 值排列。 仍以仅部署 cache A 和 cache C 的情况为例,在图 4 中我们已经看到, cache 分布并不均匀。现在我们引入虚拟节点,并设置“复制个数”为
2 ,这就意味着一共会存在 4 个“虚拟节点”, cache A1, cache A2 代表了 cache
A ; cache C1, cache C2 代表了 cache C ;假设一种比较理想的情况,参见图
6 。 
图 6 引入“虚拟节点”后的映射关系
此时,对象到“虚拟节点”的映射关系为: objec1->cache A2 ; objec2->cache A1 ; objec3->cache
C1 ; objec4->cache C2 ; 因此对象 object1 和 object2 都被映射到了 cache A 上,而 object3 和
object4 映射到了 cache C 上;平衡性有了很大提高。 引入“虚拟节点”后,映射关系就从 { 对象 -> 节点 } 转换到了 { 对象 -> 虚拟节点
} 。查询物体所在 cache时的映射关系如图 7 所示。 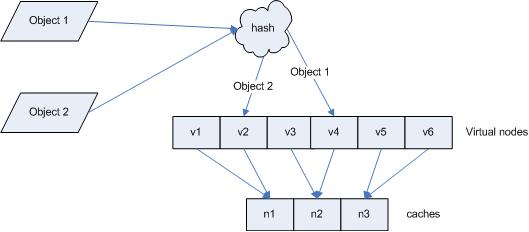
图 7 查询对象所在 cache
“虚拟节点”的 hash 计算可以采用对应节点的 IP 地址加数字后缀的方式。例如假设 cache A
的 IP 地址为202.168.14.241 。 引入“虚拟节点”前,计算 cache A 的 hash 值: Hash(“202.168.14.241”); 引入“虚拟节点”后,计算“虚拟节”点 cache A1 和 cache A2 的 hash 值: Hash(“202.168.14.241#1”); // cache A1
Hash(“202.168.14.241#2”); // cache A2
|





