| БрМЭЦМі: |
БОЮФгкЮЂаХЃЌНщЩмСЫ
PR2ЙІФмАќАВзАЃЌGazeboжаЕФPR2ЃЌЪЙгУPR2ЪЕЯжSLAMЃЌPR2ЛњаЕБлЕФЪЙгУЕШЁЃ
|
|
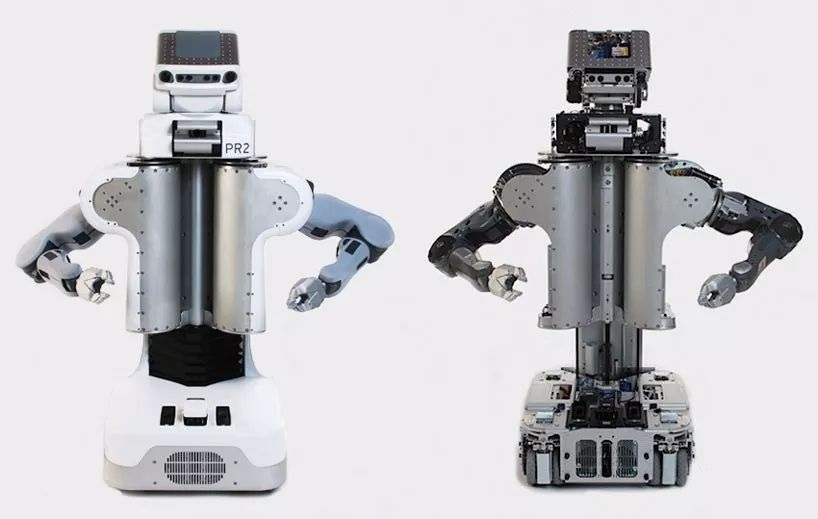
PR2ЃЈPersonal Robot 2ЃЌИіШЫЛњЦїШЫ2ДњЃЉЪЧWillow
GarageЙЋЫОЩшМЦЕФЛњЦїШЫЦНЬЈЃЌЦфжаЪ§зж2ДњБэЕкЖўДњЛњЦїШЫЁЃ
PR2гаСНЬѕЪжБлЃЌУПЬѕЪжБлЦпИіЙиНкЃЌЪжБлФЉЖЫЪЧвЛИіПЩвдеХКЯЕФМазІЃЛPR2вРППЕзВПЕФЫФИіТжзгвЦЖЏЃЌдкЭЗВПЁЂаиВПЁЂжтВПЁЂМазІЩЯЗжБ№АВзАгаИпЗжБцТЪЩуЯёЭЗЁЂМЄЙтВтОрвЧЁЂЙпадВтСПЕЅдЊЁЂДЅОѕДЋИаЦїЕШЗсИЛЕФДЋИаЩшБИЁЃдкPR2ЕФЕзВПгаСНЬЈАЫКЫЕчФдзїЮЊЛњЦїШЫИїгВМўЕФПижЦКЭЭЈаХжаЪрЃЌВЂЧвЖМАВзАСЫUbuntuКЭROSЯЕЭГЁЃ
PR2КЭROSгаЧЇЫПЭђТЦЕФЙиЯЕЃЌПЩвдЫЕROSВњЩњгкPR2ЃЌвВДйГЩСЫPR2ЁЃROSдБОЪЧWillow
GarageЮЊИДдгЕФPR2ЛњЦїШЫЦНЬЈЩшМЦЕФШэМўПђМмЃЌвРППЧПДѓЕФROSЃЌPR2ПЩвдЖРСЂЭъГЩЖржжИДдгЕФШЮЮёЃЌР§ШчPR2ПЩвдздМКПЊУХЁЂевЕНВхЭЗИјздМКГфЕчЁЂДђПЊБљЯфШЁГіЦЁОЦЁЂДђМђЕЅЕФЬЈЧђЕШЕШЁЃжЛВЛЙ§PR2МлИёИпАКЃЌЖјЧвФмСІЛЙДяВЛЕНЩЬвЕгІгУЕФвЊЧѓЃЌШчНёжївЊгУгкбЇЪѕбаОПЁЃ
ПЩМћЃЌPR2ЪЧROSжадЊРЯМЖЕФЛњЦїШЫЦНЬЈЃЌЫљгаШэМўДњТывРЭагкROSЃЌВЂЧвШЋВПдкROSЩчЧјжаПЊЗХдДДњТыЃЌЮЊЮвУЧбЇЯАЁЂгІгУROSЬсЙЉСЫЗсИЛЕФзЪдДЁЃ
вЛЁЂ PR2ЙІФмАќАВзА
дкROS KineticжаЃЌДѓВПЗжPR2ЙІФмАќЛЙЮоЗЈжЇГжЃЌЙйЗНЭЦМіЪЙгУROS IndigoдЫааPR2ЁЃ
ЪзЯШЪЙгУШчЯТУќСюАВзАPR2ЛњЦїШЫЕФЯрЙиЙІФмАќЃК
| $ sudo apt-
get install ros- indigo- pr2-* |
вдЩЯУќСюжївЊАВзАСЫЯТБэжаPR2ЛњЦїШЫЯрЙиЕФROSЙІФмАќЁЃ

PR2ЛњЦїШЫЪлМлАКЙѓЃЌДѓЖрЪ§ШЫЖМЮоЗЈНгДЅЕНЃЌЫљвдетРяЮвУЧЪЙгУЗТецЦїдЫааPR2ЕФЯрЙиЙІФмЁЃ
ЖўЁЂ GazeboжаЕФPR2
ЪЙгУШчЯТУќСюЦєЖЏgazeboЗТецЛЗОГЃЌВЂЪЙгУpr2.launchНЋЛњЦїШЫМгдиЕНgazeboжаЃК
$ roslaunch
gazebo _ ros empty_ world .launch
$ roslaunchpr2_ gazebo pr2 .launch |
вВПЩвдЪЙгУpr2_gazeboЙІФмАќжаЕФpr2_empty_world.launchвЛДЮадЦєЖЏgazeboВЂМгдиЛњЦїШЫФЃаЭЃК
| $ roslaunch
pr2_ gazebo pr2_ empty_world .launch |
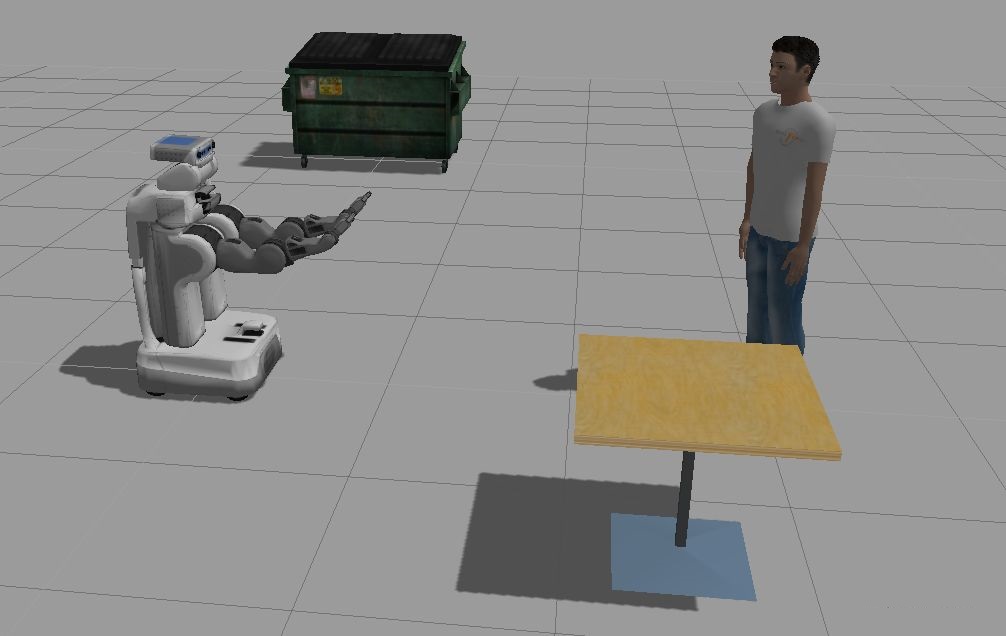
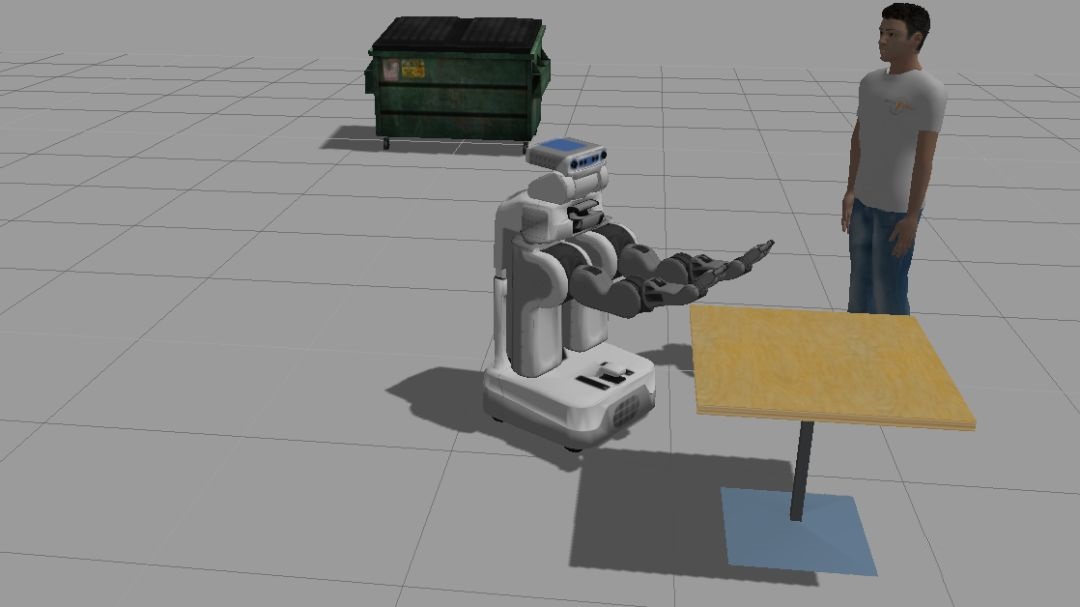
ЦєЖЏГЩЙІКѓЃЌОЭПЩвддквЛИіПеПѕЕФgazeboЗТецЛЗОГжаПДЕНPR2ЛњЦїШЫСЫЁЃ

ВщПДЕБЧАЯЕЭГжаЕФЛАЬтСаБэЃЌЛсПДЕНжкЖрЛАЬтвбОЗЂВМЛђепЕШД§ЖЉдФЃЌетОЭЪЧPR2ЛњЦїШЫЗТецЦїЬсЙЉИјгУЛЇЕФНгПкЃЌЮвУЧПЩвдЛљгкетаЉНгПкЪЕЯжКмЖрЙІФмЁЃ
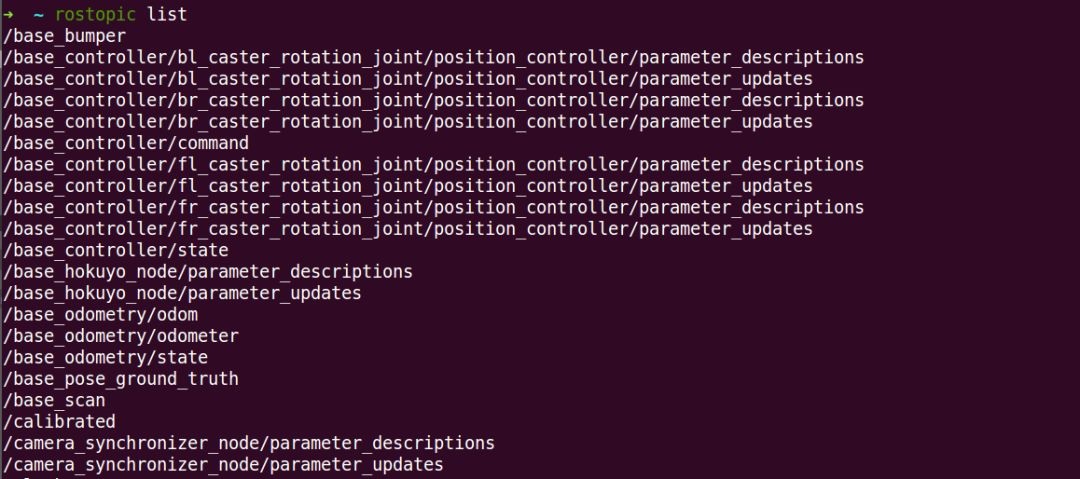
ЮЊСЫВтЪдPR2ЕФДЋИаЦїЪЧЗёЦєЖЏГЩЙІЃЌПЩвддкЗТецЛЗОГжаЫцЛњЬэМгвЛаЉЭтВПЮяЬхЁЃ
ШЛКѓДђПЊrvizЃЌЬэМгЕудЦЁЂМЄЙтЁЂЩуЯёЭЗЕШВхМўЃЌЪЕЯжДЋИаЦїЪ§ОнЕФПЩЪгЛЏЯдЪОЁЃ
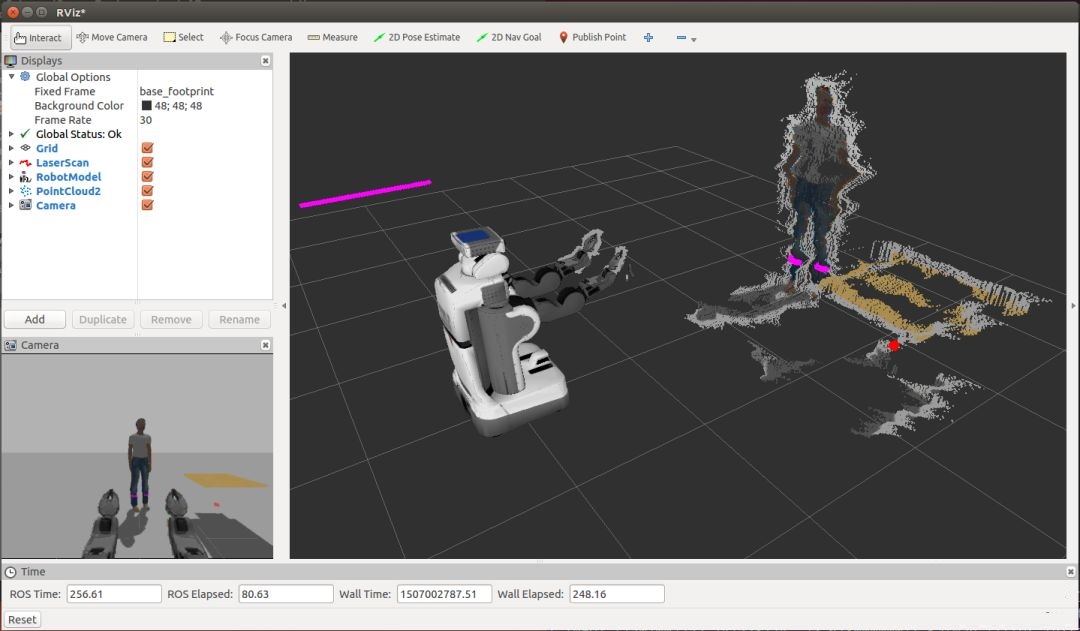
ФПЧАPR2ЛњЦїШЫЛЙДІгкОВжЙзДЬЌЃЌПЩвддЫааМќХЬПижЦНкЕуЃЌПижЦPR2дЫЖЏЃК
| $ roslaunch
pr2_ teleop teleop_ keyboard .launch |
ЦєЖЏКѓИљОнжеЖЫжаЕФЬсЪОЃЌЪЙгУМќХЬПижЦPR2ЛњЦїШЫдкgazeboжавЦЖЏЃЌЭЌЪБrvizжаЕФPR2ФЃаЭвВЛсЭЌВНИќаТЁЃ
дкПижЦPR2вЦЖЏЪБЃЌrvizжаЕФFixed FrameашвЊаоИФЮЊodom_combined
Ш§ЁЂ ЪЙгУPR2ЪЕЯжSLAM
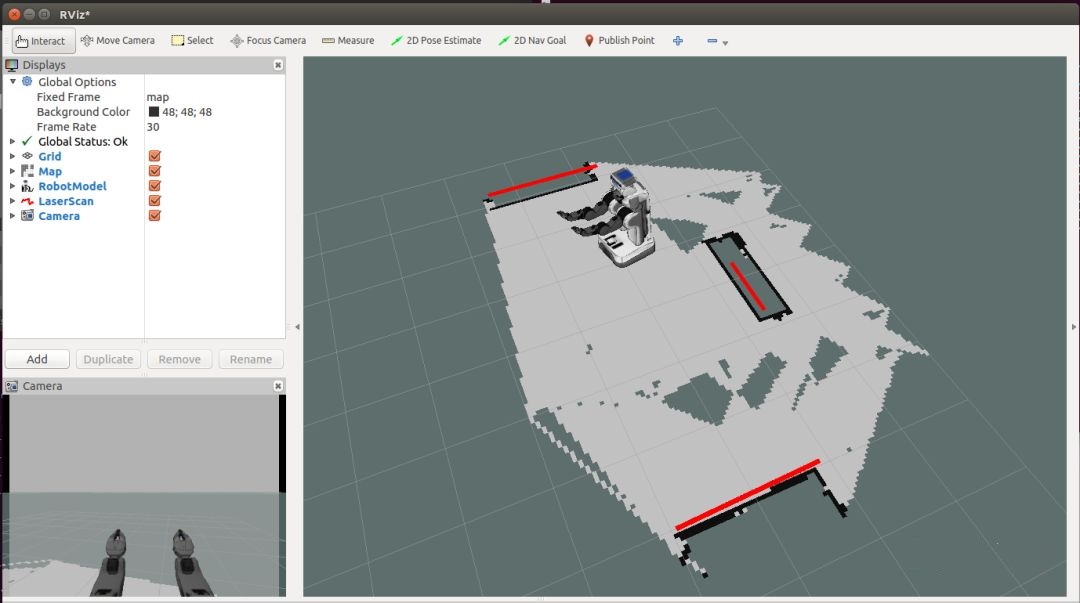
дкPR2ЗТецЛЗОГжаЃЌЮвУЧвбОЛёШЁЕНЫљгаДЋИаЦїЕФЪ§ОнЃЌВЂЧвПЩвдПижЦPR2вЦЖЏЃЌНгЯТРДГЂЪдЪЙгУPR2ЪЕЯжSLAMЁЃ
ЕквЛВНЛЙЪЧЦєЖЏPR2ЕФgazeboЗТецЛЗОГЃК
| $ roslaunchpr2
_gazebo pr2 _empty _world.launch |
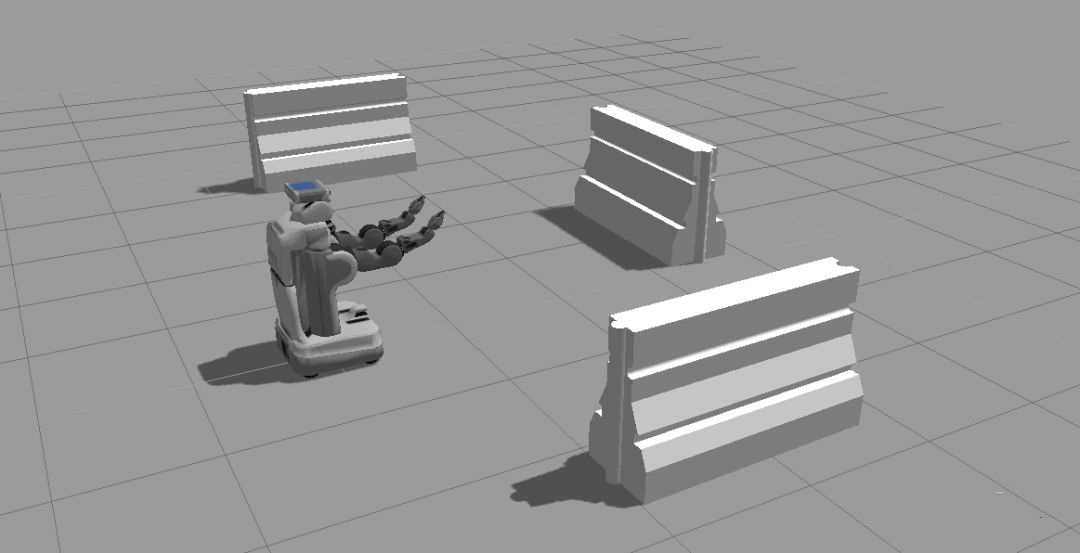
ШЛКѓдкПеПѕЕФgazeboЗТецЛЗОГжаЬэМгвЛаЉеЯАЮяЬхЁЃ
етРявдgmappingЮЊР§ЃЌДДНЈвЛИіЦєЖЏgmappingНкЕуЕФЦєЖЏЮФМўpr2_build_map.launchЃК
<launch>
<node name= "gmapping_node"pkg= "gmapping"type
="slam_ gmapping" respawn= "false"
>
<remap to="base_ scan" from= "scan"/>
<paramname= "odom_frame" value ="odom_combined"
/>
</node>
</launch> |
ШЛКѓдкИУЮФМўЫљдкЕФТЗОЖЯТжБНгдЫаавдЯТУќСюЃК
| $ roslaunch
pr2_ build_map .launch |
ШчЙћlaunchЮФМўЁЂНкЕуЁЂПЩжДааЮФМўЕШдкжеЖЫЕФЕБЧАТЗОЖЯТЃЌдЫааУќСюЪБПЩвдВЛМгЙІФмАќУћЁЃ
ЦєЖЏГЩЙІКѓЃЌgmappingНкЕуОЭПЊЪМSLAMНЈЭМСЫЁЃЦєЖЏrvizВЂЬэМгЯдЪОВхМўКѓЃЌПЩвдПДЕНШчЭМЫљЪОЕФSLAMаЇЙћЁЃ
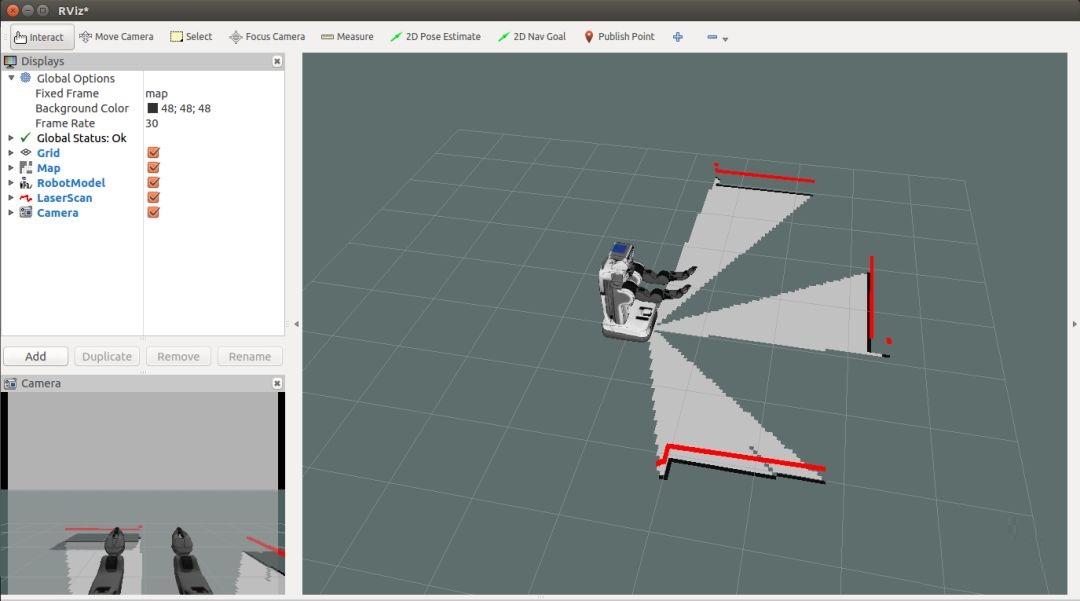
ЦєЖЏМќХЬПижЦНкЕуЃЌПижЦPR2ЛњЦїШЫдкЗТецЛЗОГжаЮЇШЦеЯАЮяЬхвЦЖЏЃЌОЭПЩвдЪЕЯжSLAMСЫЁЃ
| $ roslaunch
pr2_ teleop teleop_ keyboard .launch |
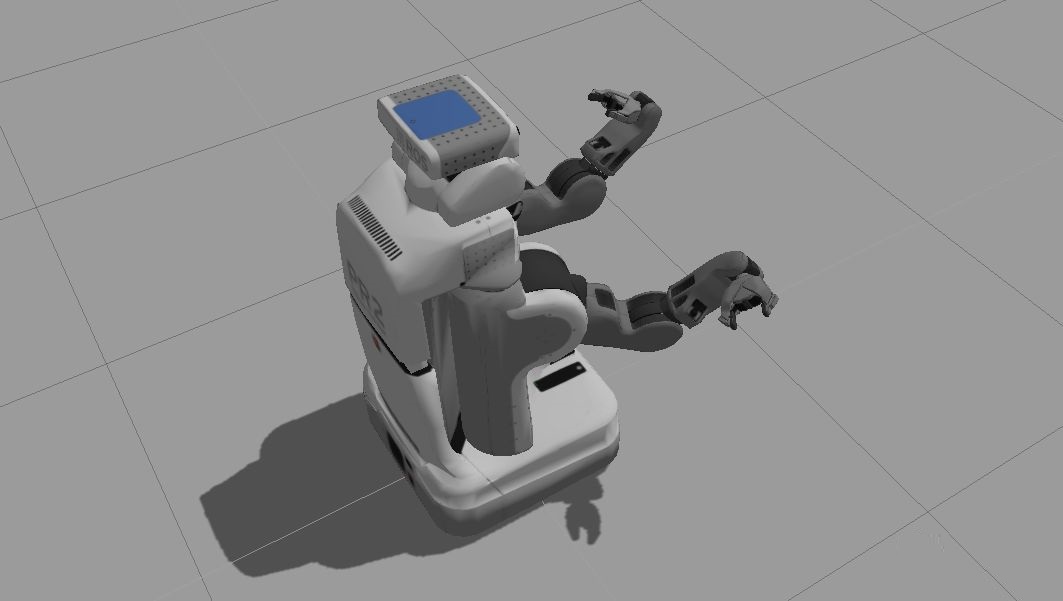
ЫФЁЂ PR2ЛњаЕБлЕФЪЙгУ
PR2ВЛНіЪЧвЛИівЦЖЏЛњЦїШЫЦНЬЈЃЌЫќЛЙзАХфСЫСНИіЛњаЕЪжЃЌПЩвдЪЕЯжКмЖрИДдгЕФЛњаЕБлВйзїЁЃРрЫЦгкМќХЬЗЂВМЫйЖШПижЦжИСюЃЌЮвУЧвВПЩвддкжеЖЫжаЪЙгУШчЯТУќСюПижЦPR2ЕФСНИіЛњаЕБлЃК
$ roslaunch
pr2_ gazebo pr2_ empty_ world.launch
$ roslaunch pr2_ teleop_general pr2_ teleop_general_
keyboard.launch |
ЦєЖЏГЩЙІКѓЃЌПЩвддкжеЖЫжаПДЕНЬсЪОаХЯЂЃЌЗжБ№ПижЦPR2ЕФЭЗВПЁЂЩэЬхЁЂЛњаЕБлЕШЖрИіПЩдЫЖЏВПЮЛЁЃ

ДЫДІбЁдёПижЦЛњаЕБлЃЌШЛКѓЛсПДЕНвЛЯЕСаПижЦУќСюЁЃ
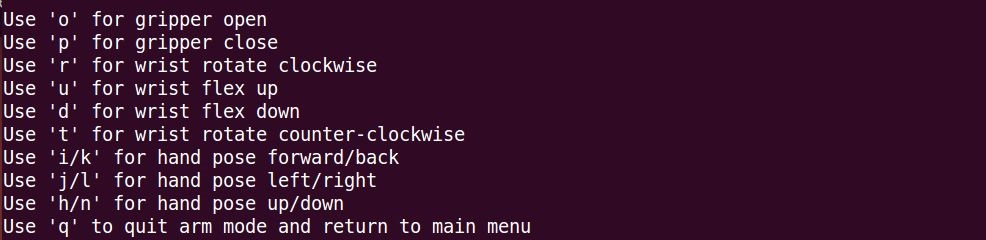
АДееУќСюЬсЪОЕуЛїМќХЬАДМќЃЌОЭПЩвдПижЦPR2ЛњЦїШЫЕФСНИіЪжБлдЫЖЏСЫЁЃ
ЫЕЕНЛњаЕБлдЫЖЏЃЌОЭВЛЕУВЛЬсЕНMoveIt!ЃЌPR2ЛњЦїШЫЕФЛњаЕБлвВПЩвдЭЈЙ§MoveIt!ПижЦЁЃдкАВзАЭъГЩЕФPR2ЙІФмАќжаЃЌвбОАќКЌСЫPR2ЪжБлЕФMoveIt!ХфжУЙІФмАќЃЌПЩвджБНгЦєЖЏdemoЪОР§ЃК
| $ roslaunch
pr2_ moveit _config demo.launch |
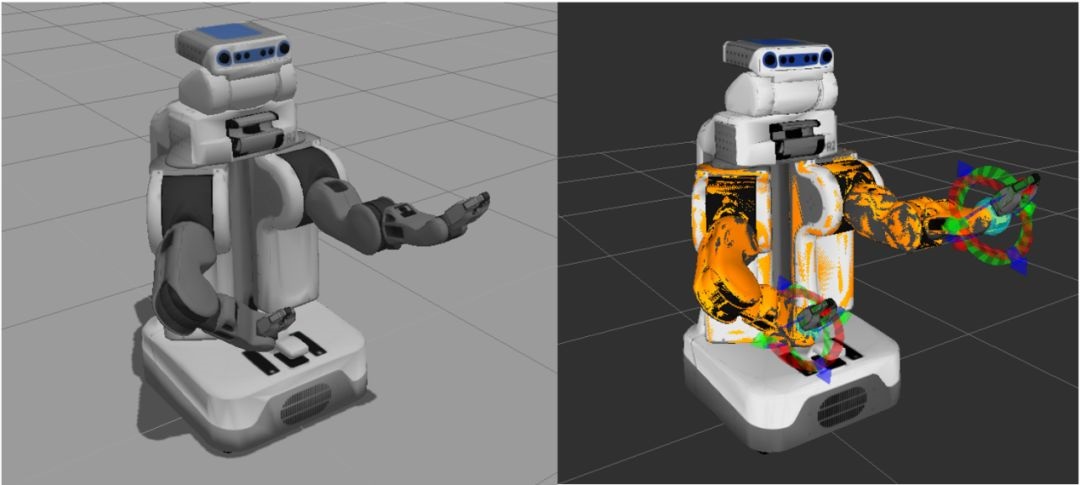
дкЦєЖЏЕФrvizжаЛсПДmoveitЕФНчУцЃЌПЩвдЭЈЙ§MoveIt!ВхМўЛђДњТыПижЦЛњаЕЪжБлдЫЖЏЁЃ
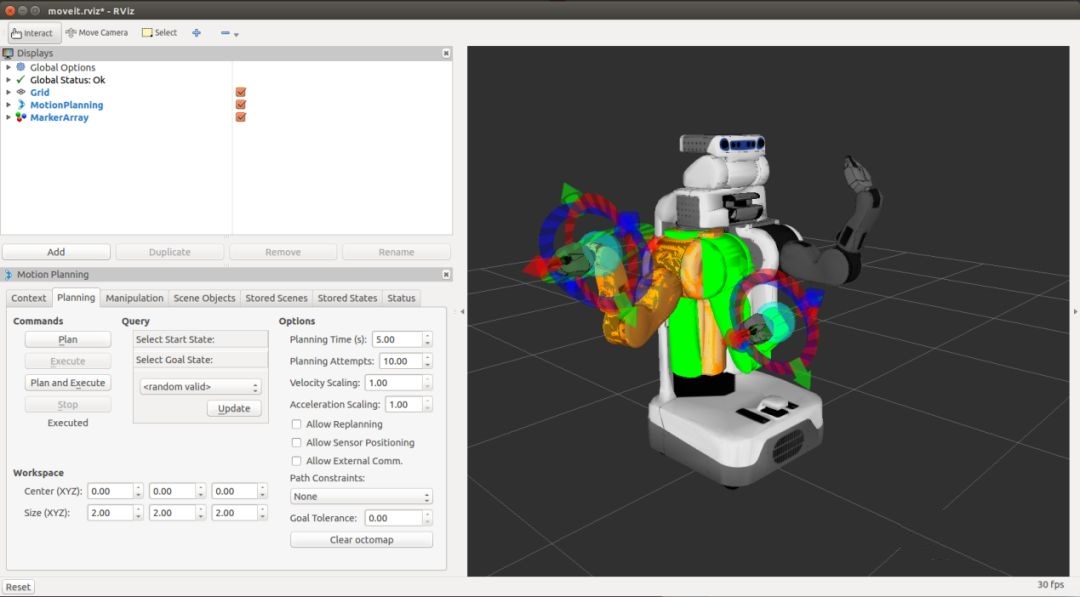
Г§ДЫжЎЭтЃЌЮвУЧвВПЩвдЪЙгУШчЯТУќСюЃЌЭЈЙ§MoveIt!ПижЦgazeboЗТецЦїжаЕФPR2ЃК
$ roslaunch
pr2_ gazebopr2_ empty_ world.launch
$ roslaunch pr2_ moveit_ config move_ group.launch
$ roslaunch pr2_ moveit_ config moveit_ rviz.launch |
ИїжжПижЦЦїВхМўдкетРяЖМвбОХфжУЭъГЩЃЌгааЫШЄЕФЖСепПЩвдЯъЯИбЇЯАPR2ЙІФмАќжаЕФдДТыЃЌетаЉЖМЪЧЮвУЧЪЕМљЙ§ГЬжаживЊЕФВЮПМзЪСЯЁЃ
дйДЮдкrvizжаПижЦPR2ЕФЛњаЕЪжБлдЫЖЏЃЌgazeboжаPR2ЕФЪжБлНЋИљОнЙцЛЎЕФЙьМЃЭъГЩдЫЖЏЁЃ
|