| БрМЭЦМі: |
БОЮФгкРДдДгкЭјТч,НщЩмСЫЛљгкЛњЦїШЫВйзїЯЕЭГROSЕФЮоШЫМнЪЛЯЕЭГЃЌВЂЗжЮіСЫЫќЕФгХШБЕуКЭПЩППадЕШжЊЪЖЁЃ
|
|
БОЮФЪЧЮоШЫМнЪЛММЪѕЯЕСаЕФЕкЖўЦЊЁЃдкЩЯЦЊНтЮіЙтбЇРзДяЃЈLiDARЃЉММЪѕжЎКѓЃЌБОЮФзХжиНщЩмЛљгкЛњЦїШЫВйзїЯЕЭГROSЕФЮоШЫМнЪЛЯЕЭГЁЃЮФжаНЋНщЩмROSвдМАЫќдкЮоШЫМнЪЛГЁОАжаЕФгХШБЕуЃЌВЂЬжТлШчКЮдкROSЕФЛљДЁЩЯЬсЩ§ЮоШЫМнЪЛЯЕЭГЕФПЩППадЁЂЭЈаХадФмКЭАВШЋадЁЃ
ЮоШЫМнЪЛЃКЖржжММЪѕЕФМЏГЩ
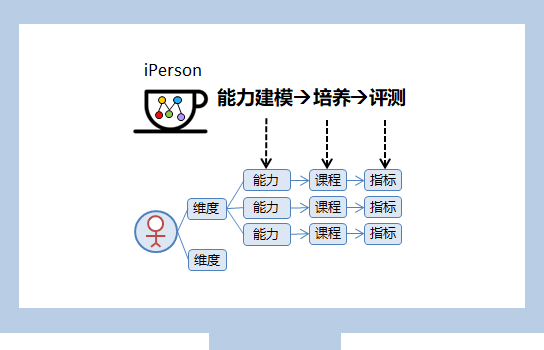
ЮоШЫМнЪЛММЪѕЪЧЖрИіММЪѕЕФМЏГЩЃЌШчЭМ1ЫљЪОЃЌвЛИіЮоШЫМнЪЛЯЕЭГАќКЌСЫЖрИіДЋИаЦїЃЌАќРЈГЄОрРзДяЁЂМЄЙтРзДяЁЂЖЬОрРзДяЁЂЩуЯёЭЗЁЂГЌЩљВЈЁЂGPSЁЂЭгТнвЧЕШЁЃУПИіДЋИаЦїдкдЫааЪБЖМВЛЖЯВњЩњЪ§ОнЃЌЖјЧвЯЕЭГЖдУПИіДЋИаЦїВњЩњЕФЪ§ОнЖМгаКмЧПЕФЪЕЪБДІРэвЊЧѓЁЃБШШчЩуЯёЭЗашвЊДяЕН60FPSЕФжЁТЪЃЌвтЮЖзХСєИјУПжЁЕФДІРэЪБМфжЛга16КСУыЁЃЕЋЕБЪ§ОнСПдіДѓжЎКѓЃЌЗжХфЯЕЭГзЪдДБуГЩСЫвЛИіФбЬтЁЃР§ШчЃЌЕБДѓСПЕФМЄЙтРзДяЕудЦЪ§ОнНјШыЯЕЭГЃЌеМТњCPUзЪдДЃЌОЭКмПЩФмЪЙЕУЩуЯёЭЗЕФЪ§ОнЮоЗЈМАЪБДІРэЃЌЕМжТЮоШЫМнЪЛЯЕЭГДэЙ§НЛЭЈЕЦЕФЪЖБ№ЃЌдьГЩбЯжиКѓЙћЁЃ
ЭМ1 ЮоШЫМнЪЛЯЕЭГЗЖР§
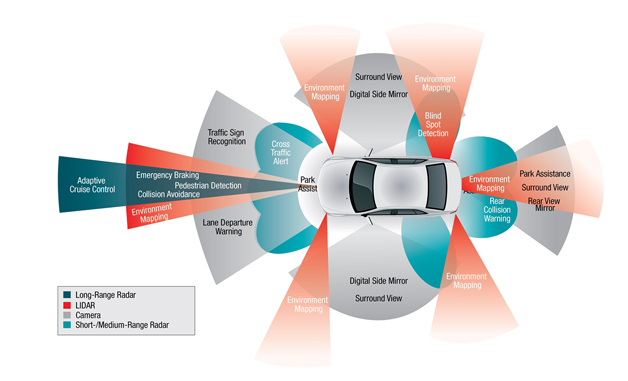
ШчЭМ2ЫљЪОЃЌЮоШЫМнЪЛЯЕЭГећКЯСЫЖрИіШэМўФЃПщЃЈАќРЈТЗОЖЙцЛЎЁЂБмеЯЁЂЕМКНЁЂНЛЭЈаХКХМрВтЕШЃЉКЭЖрИігВМўФЃПщЃЈАќРЈМЦЫуЁЂПижЦЁЂДЋИаЦїФЃПщЕШЃЉЃЌШчКЮгааЇЕїХфШэгВМўзЪдДвВЪЧвЛИіЬєеНЁЃОпЬхАќРЈШ§ИіЮЪЬтЃКЕквЛЃЌЕБШэгВМўФЃПщЪ§ОндіМгЃЌдЫааЦкМфФбУтгааЉФЃПщЛсГіЯжвьГЃЭЫГіЕФЮЪЬтЃЌЩѕжСЕМжТЯЕЭГБРРЃЃЌДЫЪБШчКЮЮЊЬсЙЉЯЕЭГздаоИДФмСІЃПЕкЖўЃЌгЩгкФЃПщжЎМфгаКмЧПЕФСЊЯЕЃЌШчКЮЙмРэФЃПщМфЕФгааЇЭЈаХЃЈЙиМќФЃПщМфЕФЭЈаХЃЌаХЯЂВЛПЩЖЊЪЇЃЌВЛПЩгаЙ§ДѓЕФбгЪБЃЉЃПЕкШ§ЃЌУПИіЙІФмФЃПщМфШчКЮНјаазЪдДИєРыЃПШчКЮЗжХфМЦЫугыФкДцзЪдДЃПЕБзЪдДВЛзуЪБШчКЮШЗШЯИќИпЕФгХЯШМЖжДааЃП
ЭМ2 ЮоШЫМнЪЛШэгВМўећКЯ
МђЕЅЕФЧЖШыЪНЯЕЭГВЂВЛФмТњзуЮоШЫМнЪЛЯЕЭГЕФЩЯЪіашЧѓЃЌЮвУЧашвЊвЛИіГЩЪьЁЂЮШЖЈЁЂИпадФмЕФВйзїЯЕЭГШЅЙмРэИїИіФЃПщЁЃдкЯъЯИЕїбаКѓЃЌЮвУЧОѕЕУЛњЦїШЫВйзїЯЕЭГROSБШНЯЪЪКЯЮоШЫМнЪЛГЁОАЁЃЯТЮФНЋНщЩмROSЕФгХШБЕуЃЌвдМАШчКЮИФНјROSЪЙжЎИќЪЪгУгкЮоШЫМнЪЛЯЕЭГЁЃ
ЛњЦїШЫВйзїЯЕЭГЃЈROSЃЉМђНщ
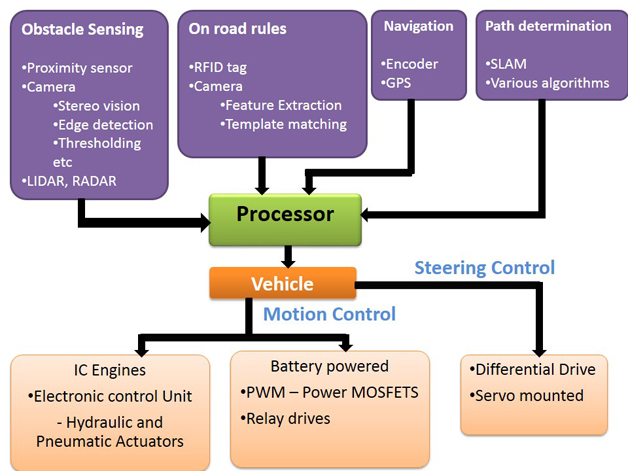
ROSЪЧвЛИіЧПДѓЖјСщЛюЕФЛњЦїШЫБрГЬПђМмЃЌДгШэМўЙЙМмЕФНЧЖШЫЕЃЌЫќЪЧвЛжжЛљгкЯћЯЂДЋЕнЭЈаХЕФЗжВМЪНЖрНјГЬПђМмЁЃROSКмдчОЭБЛЛњЦїШЫаавЕЪЙгУЃЌКмЖржЊУћЕФЛњЦїШЫПЊдДПтЃЌБШШчЛљгкquaternionЕФзјБъзЊЛЛЁЂ3DЕудЦДІРэЧ§ЖЏЁЂЖЈЮЛЫуЗЈSLAMЕШЖМЪЧПЊдДЙБЯзепЛљгкROSПЊЗЂЕФЁЃвђЮЊROSБОЩэЪЧЛљгкЯћЯЂЛњжЦЕФЃЌПЊЗЂепПЩвдИљОнЙІФмАбШэМўВ№ЗжГЩЮЊИїИіФЃПщЃЌУПИіФЃПщжЛЪЧИКд№ЖСШЁКЭЗжЗЂЯћЯЂЃЌФЃПщМфЭЈЙ§ЯћЯЂЙиСЊЁЃШчЭМ3ЫљЪОЃЌзюзѓБпЕФНкЕуПЩФмЛсИКд№ДггВМўЧ§ЖЏЖСШЁЪ§ОнЃЈБШШчKinectЃЉЃЌЖСГіЕФЪ§ОнЛсвдЯћЯЂЕФЗНЪНДђАќЃЌROSЕзВуЛсЪЖБ№етИіЯћЯЂЕФЪЙгУепЃЌШЛКѓАбЯћЯЂЪ§ОнЗжЗЂИјЫћУЧЁЃ
ЭМ3 ROSЯЕЭГ
ROS 1.0
ROS 1.0Ц№дДгкWillow GarageЕФPR2ЯюФПЃЌжївЊзщМўАќРЈROS MasterЁЂROS
NodeКЭROS ServiceШ§жжЁЃROS MasterЕФжївЊЙІФмЪЧУќУћЗўЮёЃЌЫќДцДЂСЫЦєЖЏЪБашвЊЕФдЫааЪБВЮЪ§ЃЌЯћЯЂЗЂВМЩЯгЮНкЕуКЭНгЪеЯТгЮНкЕуЕФСЌНгУћКЭСЌНгЗНЪНЃЌКЭвбгаROSЗўЮёЕФСЌНгУћЁЃROS
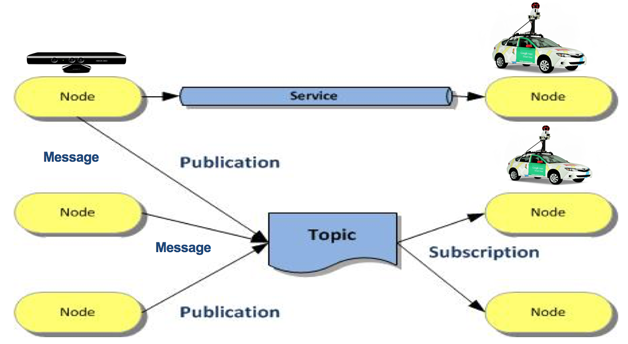
NodeНкЕуЪЧеце§ЕФжДааФЃПщЃЌЖдЪеЕНЕФЯћЯЂНјааДІРэЃЌВЂЧвЗЂВМаТЕФЯћЯЂИјЯТгЮНкЕуЁЃROS ServiceЪЧвЛжжЬиЪтЕФROSНкЕуЃЌЫќЯрЕБгквЛИіЗўЮёНкЕуЃЌНгЪмЧыЧѓВЂЗЕЛиЧыЧѓЕФНсЙћЁЃЭМ4еЙЪОСЫROSЭЈаХЕФСїГЬЫГађЃЌЪзЯШНкЕуЛсЯђmaster
advertiseЛђепsubscribeИааЫШЄЕФtopicЁЃЕБДДНЈСЌНгЪБЃЌЯТгЮНкЕуЛсЯђЩЯгЮНкЕуTCP
ServerЗЂВМСЌНгЧыЧѓЃЌЕШСЌНгДДНЈКѓЃЌЩЯгЮНкЕуЕФЯћЯЂОЭЛсЭЈЙ§СЌНгЫЭжСЯТгЮНкЕуЁЃ
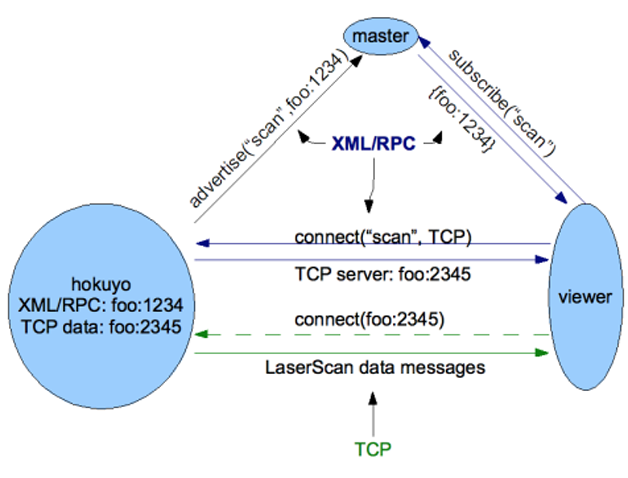
ЭМ4 ROS Master NodeЭЈаХ
ROS 2.0
ROS 2.0ЕФИФНјжївЊЪЧЮЊСЫШУROSФмЙЛЗћКЯЙЄвЕМЖЕФдЫааБъзМЃЌВЩгУСЫDDSЃЈЪ§ОнЗжЗЂЗўЮёЃЉетИіЙЄвЕМЖБ№ЕФжаМфМўРДИКд№ПЩППЭЈаХЃЌЭЈаХНкЕуЖЏЬЌЗЂЯжЃЌВЂгУshared
memoryЗНЪНЪЙЕУЭЈаХаЇТЪИќИпЁЃЭЈЙ§ЪЙгУDDSЃЌЫљгаНкЕуЕФЭЈаХЭиЦЫНсЙЙЖМвРРЕгкЖЏЬЌP2PЕФздЗЂЯжФЃЪНЃЌЫљвдвВОЭШЅЕєROS
MasterетИіжааФНкЕуЁЃШчЭМ5ЫљЪОЃЌRTI ContextЁЂPrismTech OpenSpliceКЭTwin
OaksЖМЪЧDDSЕФжаМфМўЬсЙЉЩЬЃЌЩЯВуЭЈЙ§DDS APIЗтзАЃЌетбљDDSЕФЪЕЯжЖдгкROS ClientЭИУїЁЃЩшМЦЩЯROSжївГЯъЯИЬжТлСЫгУDDSЕФдвђЃЌЯъЧщВЮМћhttp://design.ros2.org/articles/ros_on_dds.htmlЁЃ
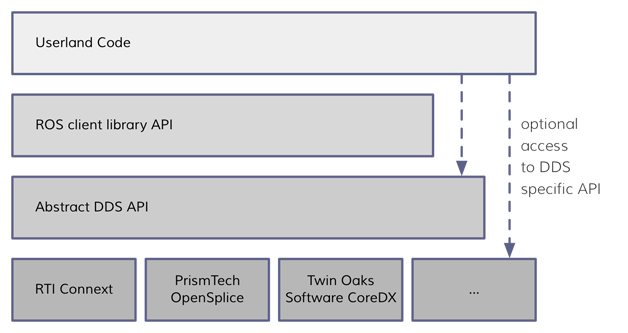
ЭМ5 ROS 2.0 DDS
дкЮоШЫГЕМнЪЛЯЕЭГжа, ЮвУЧбЁдёвРОЩЛљгкROS 1.0 ПЊЗЂЃЌЖјВЛЪЧROS 2.0ЃЌжївЊгавдЯТМИЕуПМТЧ:
ROS 2.0ЪЧвЛИіПЊЗЂжаЕФПђМмЃЌКмЖрЙІФмЛЙВЛЪЧКмЭъећЃЌгаД§ИќЖрЕФВтЪдгыбщжЄЁЃЖјдкЮоШЫМнЪЛЛЗОГжаЃЌЮШЖЈадгыАВШЋадЪЧжСЙиживЊЕФЃЌЮвУЧашвЊЛљгквЛИіОЙ§бщжЄЕФЮШЖЈЯЕЭГРДБЃжЄЯЕЭГЕФЮШЖЈадЁЂАВШЋадКЭадФмЃЌвдДяЕНЮоШЫГЕЕФвЊЧѓЁЃ
DDSБОЩэЕФКФЗбЁЃЮвУЧВтЪдСЫжБНгдкROS 1.0ЩЯЪЙгУDDSжаМфМўЃЌЦфжаЙњЗРПЦММДѓбЇгавЛИіПЊдДЯюФПMicROSвбОзіСЫЯрЙиЕФГЂЪдЃЌЯъЧщВЮМћhttps://github.com/cyberdb/micROS-drtЁЃЕЋЪЧЪЕбщЗЂЯждквЛАуЕФROSЭЈаХГЁОАжаЃЈ100KЗЂЫЭепНгЪеепЭЈаХЃЉЃЌROS
on DDSЕФЭЬЭТТЪВЂВЛМАROS 1.0ЃЌжївЊдвђЪЧDDSПђМмБОЩэЕФКФЗбвЊБШROSЖрвЛаЉЃЌЭЌЪБгУСЫDDSвдКѓCPUеМгУТЪгаУїЯдЬсИпЁЃЕЋЪЧЮвУЧвВШЗШЯСЫЪЙгУDDSжЎКѓЃЌROSЕФQoSИпгХЯШМЖЕФЭЬЭТТЪКЭзщВЅФмСІгаСЫДѓЗљЬсЩ§ЁЃЮвУЧЕФВтЪдЛљгкPrismTech
OpenSpliceЕФЩчЧјАцЃЌдкЫќЕФЦѓвЕАцжагаеыЖдЕЅЛњЕФгХЛЏЃЌБШШчЪЙгУСЫЙВЯэФкДцЕФгХЛЏЃЌЮвУЧднЮДВтЪдЁЃ
DDSНгПкЕФИДдгадЁЃDDSБОЩэОЭЪЧвЛЬзХгДѓЕФЯЕЭГЃЌЦфНгПкЕФЖЈвхМЋЦфИДдгЃЌЭЌЪБЮФЕЕжЇГжНЯБЁШѕЁЃ
ЯЕЭГПЩППад
ШчЩЯЮФЫљЪіЃЌЯЕЭГПЩППадЪЧЮоШЫМнЪЛЯЕЭГзюживЊЕФЬиадЁЃЪдЯыМИИіГЁОАЃКЕквЛЃЌЯЕЭГдЫааЪБROSMasterГіДэЭЫГіЃЌЕМжТЯЕЭГБРРЃЃЛЕкЖўЃЌЦфжавЛИіROSНкЕуГіДэЃЌЕМжТЯЕЭГВПЗжЙІФмШБЪЇЁЃвдЩЯШЮКЮвЛИіГЁОАдкЮоШЫМнЪЛЛЗОГжаЖМПЩФмдьГЩбЯжиЕФКѓЙћЁЃЖдгкROSЖјбдЃЌЦфдкЙЄвЕСьгђЕФгІгУПЩППадЪЧЗЧГЃживЊЕФЩшМЦПМСПЃЌЕЋЪЧФПЧАЕФROSЩшМЦЖдетЗНУцПМТЧЕУБШНЯЩйЁЃЯТУцОЭЬжТлЪЕЪБЯЕЭГЕФПЩППадЩцМАЕФвЛаЉвЊЫиЁЃ
ШЅжааФЛЏ
ROSживЊНкЕуашвЊШШБИЗнЃЌвдБухДЛњЪБПЩвдЫцЪБЧаЛЛЁЃдкROS 1.0ЕФЩшМЦжаЃЌжїНкЕуЮЌЛЄСЫЯЕЭГдЫааЫљашЕФСЌНгЁЂВЮЪ§КЭжїЬтаХЯЂЃЌШчЙћROS
MasterхДЛњСЫЃЌећИіЯЕЭГОЭгаПЩФмЮоЗЈе§ГЃдЫааЁЃШЅжааФЛЏЕФНтОіЗНАИгаКмЖрЃЌШчЭМ6ЫљЪОЃЌЮвУЧПЩвдВЩгУжїДгНкЕуЕФЗНЪНЃЈРрЫЦZooKeeperЃЉЃЌЭЌЪБжїНкЕуЕФаДШыаХЯЂЫцЪББИЗнЃЌжїНкЕухДЛњКѓЃЌБИЗнНкЕуБЛЧаЛЛЮЊжїНкЕуЃЌВЂЧвгУБИЗнЕФжїНкЕуЭъГЩаХЯЂГѕЪМЛЏЁЃ
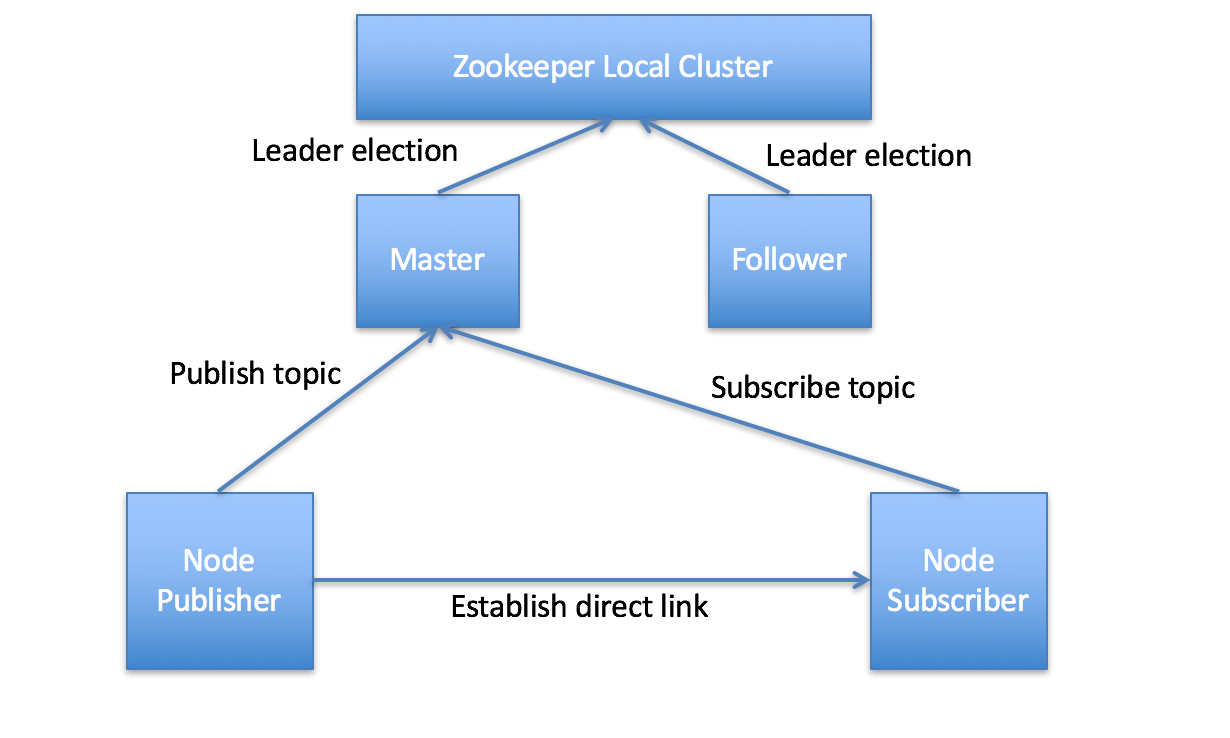
ЭМ6 ЛљгкZooKeeperЕФМрПиКЭБЈОЏ
ЪЕЪБМрПиКЭБЈОЏ
ЖдгкдЫааЕФНкЕуЪЕЪБМрПиЦфдЫааЪ§ОнЃЌВЂМьВтЕНбЯжиЕФДэЮѓаХЯЂЪББЈОЏЁЃФПЧАROSВЂУЛгаеыЖдМрПизіЬЋЖрЕФЙЙМмПМТЧЃЌШЛЖјетПщЗНУцЧЁЧЁЪЧзюживЊЕФЁЃЖдгкдЫааЪБЕФНкЕуЃЌМрПиЦфдЫааЪ§ОнЃЌБШШчгІгУВуЭГМЦаХЯЂЁЂдЫаазДЬЌЕШЃЌЖдНЋРДЕФЕїЪдЁЂДэЮѓзЗзйЖМгаКмЖрКУДІЁЃШчЭМ7ЫљЪОЃЌЪЕЪБМрПиДгШэМўЙЙМмРДЫЕжївЊЗжГЩ3ВПЗжЃКROSНкЕуВуЕФМрПиЪ§ОнAPIЃЌШУПЊЗЂепФмЙЛЩшжУЫљашЕФЭГМЦаХЯЂЃЌЭЈЙ§ЭГвЛЕФAPIНјааМЧТМЃЛМрПиЗўЮёЖЫЖЈЦкДгНкЕуЛёШЁМрПиЪ§ОнЃЈЖдгкНєМБЕФБЈОЏаХЯЂЃЌНкЕуПЩвдАбЯћЯЂЭЦЫЭИјМрПиЗўЮёЖЫЃЉЃЛЛёШЁЕНМрПиЪ§ОнКѓЃЌМрПиЗўЮёЖЫЖдЪ§ОнНјааећКЯЁЂЗжЮіЁЂМЧТМЃЌдкВьОѕЕНвьГЃаХЯЂКѓБЈОЏЁЃ
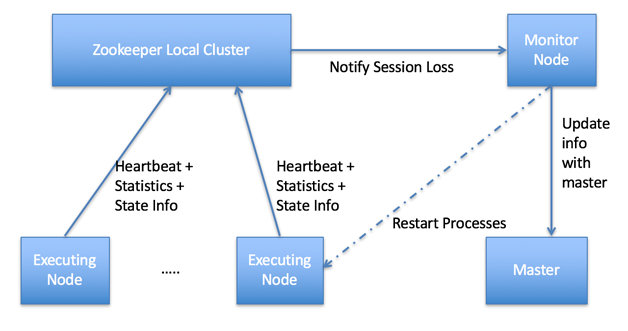
ЭМ7 ЛљгкZooKeeperЕФМрПиКЭБЈОЏ
НкЕухДЛњзДЬЌЛжИД
НкЕухДЛњЕФЪБКђЃЌашвЊЭЈЙ§жиЦєЕФЛњжЦЛжИДНкЕуЃЌетИіжиЦєПЩвдЪЧЮозДЬЌЕФЃЌЕЋгааЉЪБКђвВБиаыЪЧгазДЬЌЕФЃЌвђДЫзДЬЌЕФБИЗнИёЭтживЊЁЃНкЕуЕФхДЛњМьВтвВЪЧЗЧГЃживЊЕФЃЌШчЙћВьОѕЕННкЕухДЛњЃЌБиаыКмПьЕиЪЙгУБИЗнЕФЪ§ОнжиЦєЁЃетИіЙІФмЮвУЧвВвбОдкZooKeeperПђМмЯТЪЕЯжСЫЁЃ
ЯЕЭГЭЈаХадФмЬсЩ§
гЩгкЮоШЫМнЪЛЯЕЭГФЃПщКмЖрЃЌФЃПщМфЕФаХЯЂНЛЛЅКмЦЕЗБЃЌЬсЩ§ЯЕЭГЭЈаХадФмЛсЖдећИіЯЕЭГадФмЬсЩ§ЕФзїгУКмДѓЁЃЮвУЧжївЊДгвдЯТШ§ИіЗНУцРДЬсИпадФмЃК
ЕквЛЃЌФПЧАЭЌвЛИіЛњЦїЩЯЕФROSНкЕуМфЕФЭЈаХЪЙгУЭјТчеЛЕФloop-backЛњжЦЃЌвВОЭЪЧЫЕУПвЛИіЪ§ОнАќЖМашвЊОЙ§ЖрВуШэМўеЛДІРэЃЌетНЋдьГЩВЛБивЊЕФбгЪБЃЈУПДЮ20ЮЂУызѓгвЃЉгызЪдДЯћКФЁЃЮЊСЫНтОіетИіЮЪЬтЃЌЮвУЧПЩвдЪЙгУЙВЯэФкДцЕФЗНЗЈАбЪ§Онmemory-mapЕНФкДцжаЃЌШЛКѓжЛДЋЕнЪ§ОнЕФЕижЗгыДѓаЁаХЯЂЃЌДгЖјАбЪ§ОнДЋЪфбгЪБПижЦдк20ЮЂУыФкЃЌВЂЧвНкЪЁСЫаэЖрCPUзЪдДЁЃ
ЕкЖўЃЌЯждкROSзіЪ§ОнbroadcastЕФЪБКђЃЌЕзВуЪЕЯжЦфЪЕЪЧЪЙгУmultiple unicastЃЌвВОЭЪЧЖрИіЕуЖдЕуЕФЗЂЫЭЁЃМйШчвЊАбЪ§ОнДЋИј5ИіНкЕуЃЌФЧУДЭЌбљЕФЪ§ОнЛсБЛПНБД5ЗнЁЃетдьГЩСЫКмДѓЕФзЪдДРЫЗбЃЌЬиБ№ЪЧФкДцзЪдДЕФРЫЗбЁЃСэЭтЃЌетбљвВЛсЖдЭЈаХЯЕЭГЕФЭЬЭТСПдьГЩКмДѓбЙСІЁЃЮЊСЫНтОіетИіЮЪЬтЃЌЮвУЧЪЙгУСЫзщВЅmulticastЛњжЦЃКдкЗЂЫЭНкЕуКЭУПвЛНгЪеНкЕужЎМфЪЕЯжЕуЖдЖрЕуЕФЭјТчСЌНгЁЃШчЙћвЛИіЗЂЫЭНкЕуЭЌЪБИјЖрИіНгЪеНкЕуДЋЪфЯрЭЌЕФЪ§ОнЃЌжЛашИДжЦвЛЗнЯрЭЌЕФЪ§ОнАќЁЃзщВЅЛњжЦЬсИпСЫЪ§ОнДЋЫЭаЇТЪЃЌМѕЩйСЫЙЧИЩЭјТчГіЯжгЕШћЕФПЩФмадЁЃЭМ8ЖдБШСЫдгаЕФЭЈаХЛњжЦЃЈЛвЯпЃЉгызщВЅЛњжЦЃЈГШЩЋЃЉЕФадФмЃЌЫцзХНгЪеНкЕуЪ§СПдіМгЃЈXжсЃЉЃЌдгаЕФЭЈаХЛњжЦЕФЪ§ОнЭЬЭТСПМБОчЯТНЕЃЌЖјзщВЅЛњжЦЕФЪ§ОнЭЬЭТСПдђБШНЯЦНЮШЃЌУЛгаЪмЕНбЯжигАЯьЁЃ
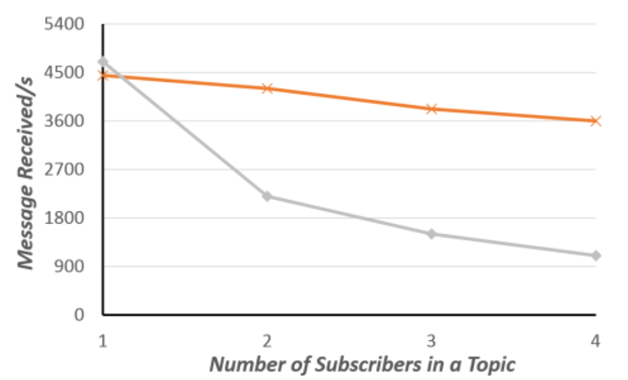
ЭМ8 MulticastадФмЬсЩ§
ЕкШ§ЃЌЖдROSЕФЭЈаХеЛбаОПЃЌЮвУЧЗЂЯжЭЈаХбгЪБКмДѓЕФЫ№КФЪЧдкЪ§ОнЕФађСаЛЏгыЗДађСаЛЏЕФЙ§ГЬЁЃађСаЛЏНЋФкДцРяЖдЯѓЕФзДЬЌаХЯЂзЊЛЛЮЊПЩвдДцДЂЛђДЋЪфЕФаЮЪНЁЃдкађСаЛЏЦкМфЃЌЖдЯѓНЋЦфЕБЧАзДЬЌаДШыЕНСйЪБЛђГжОУадДцДЂЧјЁЃжЎКѓЃЌПЩвдЭЈЙ§ДгДцДЂЧјжаЖСШЁЛђЗДађСаЛЏЖдЯѓЕФзДЬЌЃЌжиаТДДНЈИУЖдЯѓЁЃЮЊСЫНтОіетИіЮЪЬтЃЌЮвУЧЪЙгУСЫЧсСПМЖЕФађСаЛЏГЬађЃЌНЋађСаЛЏЕФбгЪБНЕЕЭСЫ50%ЁЃ
ЯЕЭГзЪдДЙмРэгыАВШЋад
ШчКЮНтОізЪдДЗжХфгыАВШЋЮЪЬтЪЧЮоШЫМнЪЛММЪѕЕФвЛИіДѓПЮЬтЁЃЯыЯѓСНИіМђЕЅЕФЙЅЛїГЁОАЃКЕквЛЃЌЦфжавЛИіROSЕФНкЕуБЛНйГжЃЌШЛКѓВЛЖЯЕиЗжХфФкДцЃЌЕМжТЯЕЭГФкДцЯћКФДљОЁЃЌдьГЩЯЕЭГOOMЖјПЊЪМЙиБеВЛЭЌЕФROSНкЕуНјГЬЃЌДгЖјећИіЮоШЫМнЪЛЯЕЭГБРРЃЁЃЕкЖўЃЌROSЕФtopicЛђепserviceБЛНйГж,
ROSНкЕужЎМфДЋЕнЕФаХЯЂБЛЮБдьЃЌЕМжТЮоШЫМнЪЛЯЕЭГааЮЊвьГЃЁЃ
ЮвУЧбЁдёЕФЗНЗЈЪЧЪЙгУLinux ContainerЃЈLXCЃЉРДЙмРэУПвЛИіROSНкЕуНјГЬЁЃМђЕЅРДЫЕЃЌLXCЬсЙЉЧсСПМЖЕФащФтЛЏвдБуИєРыНјГЬКЭзЪдДЃЌЖјЧвВЛашвЊЬсЙЉжИСюНтЪЭЛњжЦвдМАШЋащФтЛЏЕШЦфЫћИДдгЙІФмЃЌЯрЕБгкC++жаЕФNameSpaceЁЃLXCгааЇЕиНЋЕЅИіВйзїЯЕЭГЙмРэЕФзЪдДЛЎЗжЕНЙТСЂЕФШКзщжаЃЌвдИќКУЕидкЙТСЂЕФШКзщжЎМфЦНКтгаГхЭЛЕФзЪдДЪЙгУашЧѓЁЃЖдгкЮоШЫМнЪЛГЁОАРДЫЕЃЌLXCзюДѓЕФКУДІЪЧадФмЫ№КФаЁЁЃЮвУЧВтЪдЗЂЯжЃЌдкдЫааЪБLXCжЛдьГЩСЫ5%зѓгвЕФCPUЫ№КФЁЃ
Г§СЫзЪдДЯожЦЭтЃЌLXCвВЬсЙЉСЫЩГКажЇГжЃЌЪЙЕУЯЕЭГПЩвдЯожЦROSНкЕуНјГЬЕФШЈЯоЁЃЮЊСЫБмУтгаЮЃЯеадЕФROSНкЕуНјГЬПЩФмЦЦЛЕЦфЫћROSНкЕуНјГЬЕФдЫааЃЌЩГКаММЪѕПЩвдЯожЦПЩФмгаЮЃЯеадЕФROSНкЕуЗУЮЪДХХЬЁЂФкДцвдМАЭјТчзЪдДЁЃСэЭтЮЊСЫЗРжЙНкЕужаЕФЭЈаХБЛНйГжЃЌЮвУЧЛЙЪЕЯжСЫНкЕужаЭЈаХЕФЧсСПМЖМгУмНтУмЛњжЦЃЌЪЙКкПЭВЛФмЛиЗХЛђИќИФЭЈаХФкШнЁЃ
НсТл
вЊБЃжЄвЛИіИДдгЕФЯЕЭГЮШЖЈЁЂИпаЇЕидЫааЃЌУПИіФЃПщЖМФмЗЂЛгГізюДѓЕФЧБФмЃЌашвЊвЛИіГЩЪьгааЇЕФЙмРэЛњжЦЁЃдкЮоШЫМнЪЛГЁОАжаЃЌROSЬсЙЉСЫетбљвЛИіЙмРэЛњжЦЃЌЪЙЕУЯЕЭГжаЕФУПИіШэгВМўФЃПщЖМФмгааЇЕиНјааЛЅЖЏЁЃдЩњЕФROSЬсЙЉСЫаэЖрБивЊЕФЙІФмЃЌЕЋЪЧетаЉЙІФмВЂВЛФмТњзуЮоШЫМнЪЛЕФЫљгаашЧѓЃЌвђДЫЮвУЧдкROSжЎЩЯНјвЛВНЕиЬсИпСЫЯЕЭГЕФадФмгыПЩППадЃЌЭъГЩСЫгааЇЕФзЪдДЙмРэМАИєРыЁЃЮвУЧЯраХЫцзХЮоШЫМнЪЛММЪѕЕФЗЂеЙЃЌИќЖрЕФЯЕЭГашЧѓЛсБЛЬсГіЃЌБШШчГЕГЕЛЅСЊЁЂГЕгыГЧЪаНЛЭЈЯЕЭГЛЅСЊЁЂдЦГЕЛЅСЊЁЂвьЙЙМЦЫугВМўМгЫйЕШЃЌЮвУЧвВНЋЛсГжајгХЛЏетИіЯЕЭГЃЌСІЧѓШУЫќБфГЩЮоШЫМнЪЛЕФБъзМЯЕЭГЁЃ |