| БрМЭЦМі: |
БОЮФжївЊНщЩмСЫ SIFTЫуЗЈжавЛИіживЊЕФВйзїЃКЧѓШЁУшЪізгЕФжїЗНЯђвдМАЬиеїЕуЕФЬсШЁгыжїЗНЯђЕФШЗЖЈЃЌ
ЯЃЭћЖдФњЕФбЇЯАгаЫљАяжњЁЃ
БОЮФРДздгкCSDNЃЌгЩЛ№СњЙћШэМўAliceБрМЁЂЭЦМіЁЃ
|
|
МЦЫуЛњЪгОѕжаЕФЬиеїЕуЬсШЁЫуЗЈБШНЯЖрЃЌЕЋSIFTГ§СЫМЦЫуБШНЯКФЪБвдЭтЃЌЦфЫћЗНУцЕФгХЕуШУЦфГЩЮЊЬиеїЕуЬсШЁЫуЗЈжаЕФвЛПХшшВЕФУїжщЁЃSIFTЫуЗЈЕФНщЩмЭјЩЯгаКмЖрБШНЯКУЕФВЉПЭКЭЮФеТЃЌЮвдкбЇЯАетИіЫуЗЈЕФЙ§ГЬжавВВЮПДЭјЩЯКУаЉзЪСЯЃЌМДЪЙЦРМлБШНЯИпЕФЮФеТЃЌзїепдкЮФеТжаЖдгааЉБШНЯживЊЕФЯИНкЁЂЙЋЪНРДРњУЛгаЬсМАЃЌПЩФмаДВЉПЭЕФШЫздМКУїАзЃЌвВОѕЕУМђЕЅЃЌвђДЫОЭКіТдСЫетаЉЮЪЬтЃЌЕЋЪЧЖдИеШыУХЕФШЫРДЫЕЃЌПДетаЉЖЋЮїЃЌЯыИуЧхГўетаЉЪЧдѕУДРДЕФЛЙЪЧБШНЯЗбЪБЗбСІЕФЁЃБШШчSIFTЫуЗЈжавЛИіживЊЕФВйзїЃКЧѓШЁУшЪізгЕФжїЗНЯђЁЃКУЖрЮФеТжЛЪЧвЛЬсЖјЙ§ЛђКіТдЃЌШЛКѓжБНгИјГівЛИіЙЋЪНЃЌSIFTЫуЗЈЕФдзїепвВЬсЪЙгУХзЮяЯпВхжЕЃЌЕЋЪЧОпЬхдѕУДВхЕФОЭВЛЬЋЯъОЁСЫЃЌЖдгкГѕбЇепРДЫЕИќЪЧВЛжЊЫљдЦЁЃвђДЫБОЮФДђЫудкВЮПДЕФЮФеТЩЯЖдгаЙиетаЉЯИНкИјГівЛаЉБШНЯЯъЯИЕФЫЕУїЃЌЛЙгаБОЮФОЁСПЖдВйзїЙ§ГЬХфБИЖдгІЭМЦЌЛђЪОвтЭМЫЕУїЃЌЭЌЪБИНЩЯrobwhesssПЊдДSIFT
CДњТыЖдгІГЬађПщВЂИјгшзЂНтЃЌЗНБуРэНтЁЃ
вЛЁЂ SIFTЫуЗЈ
1ЁЂЫуЗЈМђНщ
ГпЖШВЛБфЬиеїзЊЛЛМДSIFT (Scale-invariantfeaturetransform)ЪЧвЛжжМЦЫуЛњЪгОѕЕФЫуЗЈЁЃЫќгУРДеьВтгыУшЪігАЯёжаЕФОжВПадЬиеїЃЌЫќдкПеМфГпЖШжабАевМЋжЕЕуЃЌВЂЬсШЁГіЦфЮЛжУЁЂГпЖШЁЂа§зЊВЛБфСПЃЌДЫЫуЗЈгЩDavidLoweдк1999ФъЫљЗЂБэЃЌ2004ФъЭъЩЦзмНсЁЃ
ЦфгІгУЗЖЮЇАќКЌЮяЬхБцЪЖЁЂЛњЦїШЫЕиЭМИажЊгыЕМКНЁЂгАЯёЗьКЯЁЂ3DФЃаЭНЈСЂЁЂЪжЪЦБцЪЖЁЂгАЯёзЗзйКЭЖЏзїБШЖдЁЃ
ОжВПгАЯёЬиеїЕФУшЪігыеьВтПЩвдАяжњБцЪЖЮяЬхЃЌSIFTЬиеїЪЧЛљгкЮяЬхЩЯЕФвЛаЉОжВПЭтЙлЕФаЫШЄЕуЖјгыгАЯёЕФДѓаЁКЭа§зЊЮоЙиЁЃЖдгкЙтЯпЁЂдыЩљЁЂаЉЮЂЪгНЧИФБфЕФШнШЬЖШвВЯрЕБИпЁЃЛљгкетаЉЬиадЃЌЫќУЧЪЧИпЖШЯджјЖјЧвЯрЖдШнвзпЂШЁЃЌдкФИЪ§ХгДѓЕФЬиеїЪ§ОнПтжаЃЌКмШнвзБцЪЖЮяЬхЖјЧвЯЪгаЮѓШЯЁЃЪЙгУSIFTЬиеїУшЪіЖдгкВПЗжЮяЬхекБЮЕФеьВтТЪвВЯрЕБИпЃЌЩѕжСжЛашвЊ3ИівдЩЯЕФSIFTЮяЬхЬиеїОЭзувдМЦЫуГіЮЛжУгыЗНЮЛЁЃдкЯжНёЕФЕчФдгВМўЫйЖШЯТКЭаЁаЭЕФЬиеїЪ§ОнПтЬѕМўЯТЃЌБцЪЖЫйЖШПЩНгНќМДЪБдЫЫуЁЃSIFTЬиеїЕФаХЯЂСПДѓЃЌЪЪКЯдкКЃСПЪ§ОнПтжаПьЫйзМШЗЦЅХфЁЃ
SIFTЫуЗЈЕФЪЕжЪЪЧдкВЛЭЌЕФГпЖШПеМфЩЯВщевЙиМќЕу(ЬиеїЕу)ЃЌВЂМЦЫуГіЙиМќЕуЕФЗНЯђЁЃSIFTЫљВщевЕНЕФЙиМќЕуЪЧвЛаЉЪЎЗжЭЛГіЃЌВЛЛсвђЙтееЃЌЗТЩфБфЛЛКЭдывєЕШвђЫиЖјБфЛЏЕФЕуЃЌШчНЧЕуЁЂБпдЕЕуЁЂАЕЧјЕФССЕуМАССЧјЕФАЕЕуЕШЁЃ
2ЁЂSIFTЫуЗЈСїГЬЭМ

ЖўЁЂSIFTЫуЗЈВйзїВНжш
1ЁЂЭМЯёН№зжЫў
1.1ЁЂИпЫЙН№зжЫў
ЭМЯёИпЫЙН№зжЫў(Gaussian Pyramid)ЪЧВЩгУИпЫЙКЏЪ§ЖдЭМЯёНјааФЃК§вдМАНЕВЩбљДІРэЕУЕНЁЃЦфаЮГЩЙ§ГЬПЩШчЯТЭМЫљЪОЃК
ЦфжаИпЫЙФЃК§ЯЕЪ§МЦЫуЙЋЪНШчЯТЃК

ЦфжаИпЫЙФЃК§ЯЕЪ§МЦЫуЙЋЪНШчЯТЃК

1.1.1ЁЂИпЫЙКЏЪ§гыЭМЯёОэЛ§
ИљОн3ІвддђЃЌЪЙгУNxNЕФФЃАхдкЭМЯёУПвЛИіЯёЫиЕуДІВйзїЃЌЦфжаN=[ЃЈ6Ів+1ЃЉ]ЧвЯђЩЯШЁзюСкНќЦцЪ§ЁЃ
ЦфВйзїШчЯТЭМЃК

1.1.2ЁЂЗжРыИпЫЙОэЛ§
ЩЯУцетбљжБНггыЭМЯёОэЛ§ЃЌЫйЖШБШНЯТ§ЃЌЭЌЪБЭМЯёБпдЕаХЯЂвВЛсЫ№ЪЇбЯжиЁЃКѓРДЃЌКѓРДЁЂЁЂЁЂЃЌВЛжЊФФЮЛбЇепЗЂЯжЃЌПЩвдЪЙгУЗжРыЕФИпЫЙОэЛ§ЃЈМДЯШгУ1xNЕФФЃАхбизХXЗНЯђЖдЭМЯёОэЛ§вЛДЮЃЌШЛКѓгУNx1ЕФФЃАхбизХYЗНЯђЖдЭМЯёдйОэЛ§вЛДЮЃЌЦфжаN=[ЃЈ6Ів+1ЃЉ]ЧвЯђЩЯШЁзюСкНќЦцЪ§ЃЉЃЌетбљМШЪЁЪБвВМѕаЁСЫжБНгОэЛ§ЖдЭМЯёБпдЕаХЯЂЕФбЯжиЫ№ЪЇЁЃ

1.1.3ЁЂИпЫЙН№згЫўдДТыЗжЮі
for (o = 0; o
< octvs; o++)//Н№зжЫўзщЪ§ЮЊoctvsЃЌ
for (i = 0; i < intvls + 3; i++)//УПвЛзщгаintvls
+ 3 ВуЃЌintvlsвЛАуЮЊ3
{
if (o == 0 && i == 0)//ШчЙћЪЧЕквЛзщЕк1Ву
gauss_pyr[o][i] = cvCloneImage(base);//base ЮЊдЪМЛвЖШЭМЯёОЙ§Щ§ВЩбљЛђНЕВЩбљЕУЕНЕФЭМЯё
/* base of new octvave is halved image from end
of previous octave */
else if (i == 0)//НЈСЂЗЧЕквЛзщЕФЕк1Ву
gauss_pyr[o][i] = downsample(gauss_pyr[o - 1][intvls]);//НЕВЩбљЭМЯё
/* blur the current octave's last image to create
the next one */
else//НЈСЂЗЧЕквЛзщЕФЗЧЕк1Ву
{
gauss_pyr[o][i] = cvCreateImage(cvGetSize(gauss_pyr[o][i
- 1]),IPL_DEPTH_32F, 1);
cvSmooth(gauss_pyr[o][i - 1], gauss_pyr[o][i],CV_GAUSSIAN,
0, 0, sig[i], sig[i]);// sig[i]ЮЊФЃК§ЯЕЪ§
}//cvSmooth ЮЊЦНЛЌДІРэКЏЪ§ЃЌвВМДФЃК§ДІРэЁЃCV_GAUSSIAN ЮЊбЁгУИпЫЙКЏЪ§ЖдЭМЯёФЃК§
return gauss_pyr;//ЗЕЛиНЈКУЕФН№зжЫў |
1.2ЁЂИпЫЙВюЗжН№зжЫў
2002ФъMikolajczykдкЯъЯИЕФЪЕбщБШНЯжаЗЂЯжГпЖШЙщвЛЛЏЕФИпЫЙРЦеРЫЙКЏЪ§ЕФМЋДѓжЕКЭМЋаЁжЕЭЌЦфЫќЕФЬиеїЬсШЁКЏЪ§ЃЌР§ШчЃКЬнЖШЃЌHessianЛђHarrisНЧЬиеїБШНЯЃЌФмЙЛВњЩњзюЮШЖЈЕФЭМЯёЬиеїЁЃЖјLindebergдчдк1994ФъОЭЗЂЯжИпЫЙВюЗжКЏЪ§ЃЈМђГЦDOGЫузгЃЉгыГпЖШЙщвЛЛЏЕФИпЫЙРЦеРЫЙКЏЪ§ЗЧГЃНќЫЦЁЃШчЯТЪНЃК

Цфжаk-1ЪЧИіГЃЪ§ЃЌВЂВЛгАЯьМЋжЕЕуЮЛжУЕФЧѓШЁЁЃ
1.2.1ЁЂВюЗжН№зжЫўЕФНЈСЂ
ВюЗжН№зжЫўЕФЪЧдкИпЫЙН№зжЫўЕФЛљДЁЩЯВйзїЕФЃЌЦфНЈСЂЙ§ГЬЪЧЃКдкИпЫЙН№згЫўжаЕФУПзщжаЯрСкСНВуЯрМѕЃЈЯТвЛВуМѕЩЯвЛВуЃЉОЭЩњГЩИпЫЙВюЗжН№зжЫў.
ИпЫЙВюЗжН№зжЫўЦфВйзїШчЯТЭМЃК

1.2.2ЁЂВюЗжН№зжЫўдДТыЗжЮі
for (o = 0; o
< octvs; o++)//octvsЮЊИпЫЙН№зжЫўзщЪ§
for (i = 0; i < intvls + 2; i++)//вђЮЊЯрМѕЃЌЙЪИпЫЙН№зжЫўжаУПзщгаЃЈintvls
+ 2ЃЉВуЭМЯё
{
dog_pyr[o][i] = cvCreateImage(cvGetSize(gauss_pyr[o][i]),IPL_DEPTH_32F,
1);
cvSub(gauss_pyr[o][i + 1], gauss_pyr[o][i], dog_pyr[o][i],
NULL);//cvSubЮЊopencvФкжУЯрМѕКЏЪ§
}
return dog_pyr;//ЗЕЛиИпЫЙВюЗжН№зжЫў
|
2ЁЂПеМфМЋжЕЕуЃЈМДЙиМќЕуЃЉМьВт
ЙиМќЕуЪЧгЩDOGПеМфЕФОжВПМЋжЕЕузщГЩЕФЃЌЙиМќЕуЕФГѕВНЬНВщЪЧЭЈЙ§ЭЌвЛзщФкИїDoGЯрСкСНВуЭМЯёжЎМфБШНЯЭъГЩЕФЁЃЮЊСЫбАевDoGКЏЪ§ЕФМЋжЕЕуЃЌУПвЛИіЯёЫиЕувЊКЭЫќЫљгаЕФЯрСкЕуБШНЯЃЌПДЦфЪЧЗёБШЫќЕФЭМЯёгђКЭГпЖШгђЕФЯрСкЕуДѓЛђепаЁЁЃШчЭМЯТЭМЫљЪОЃЌжаМфЕФМьВтЕуКЭЫќЭЌГпЖШЕФ8ИіЯрСкЕуКЭЩЯЯТЯрСкГпЖШЖдгІЕФ9ЁС2ИіЕуЙВ26ИіЕуБШНЯЃЌвдШЗБЃдкГпЖШПеМфКЭЖўЮЌЭМЯёПеМфЖММьВтЕНМЋжЕЕуЁЃ
2.1ЁЂМЋжЕЕуМьВтЙ§ГЬ
2.1.1ЁЂМЋжЕЕуМьВтЪОвт

2.1.2ЁЂМЋжЕЕуМьВтдДТыЗжЮі
if (val >
0)//МЋДѓжЕМьВт{
for (i = -1; i <= 1; i++)
for (j = -1; j <= 1; j++)
for (k = -1; k <= 1; k++)
if (val < pixval32f(dog_pyr[octv][intvl + i],
r + j, c + k))//pixval32fЮЊЬсШЁЭМЯёЯёЫиЮЛжУЩЯЕФЛвЖШжЕ
return 0;}
else /* check for minimum */
{
for (i = -1; i <= 1; i++)
for (j = -1; j <= 1; j++)
for (k = -1; k <= 1; k++)
if (val > pixval32f(dog_pyr[octv][intvl + i],
r + j, c + k))//r cЮЊЭМЯёЕФааЪ§КЭСаЪ§ЃЌdog_pyrЮЊИпЫЙВюЗжЭМ
return 0; |
2.2ЁЂЙиМќЕуЖЈЮЛ
вдЩЯЗНЗЈМьВтЕНЕФМЋжЕЕуЪЧРыЩЂПеМфЕФМЋжЕЕуЃЌвдЯТЭЈЙ§ФтКЯШ§ЮЌЖўДЮКЏЪ§РДОЋШЗШЗЖЈЙиМќЕуЕФЮЛжУКЭГпЖШЃЌЭЌЪБШЅГ§ЕЭЖдБШЖШЕФЙиМќЕуКЭВЛЮШЖЈЕФБпдЕЯьгІЕу(вђЮЊDoGЫузгЛсВњЩњНЯЧПЕФБпдЕЯьгІ)ЃЌвддіЧПЦЅХфЮШЖЈадЁЂЬсИпПЙдыЩљФмСІЁЃ
2.2.1ЁЂЙиМќЕуОЋШЗЖЈЮЛ
РыЩЂПеМфЕФМЋжЕЕуВЂВЛЪЧеце§ЕФМЋжЕЕуЃЌЯТЭМЯдЪОСЫЖўЮЌКЏЪ§РыЩЂПеМфЕУЕНЕФМЋжЕЕугыСЌајПеМфМЋжЕЕуЕФВюБ№ЁЃРћгУвбжЊЕФРыЩЂПеМфЕуВхжЕЕУЕНЕФСЌајПеМфМЋжЕЕуЕФЗНЗЈНазізгЯёЫиВхжЕЁЃ

ЮЊСЫЬсИпЙиМќЕуЕФЮШЖЈадЃЌашвЊЖдГпЖШПеМфDoGКЏЪ§НјааЧњЯпВхжЕЁЃРћгУDoGКЏЪ§дкГпЖШПеМфЕФTaylorеЙПЊЪН(ВхжЕКЏЪ§)ЮЊЃКЩЯУцЫуЪНЕФОиеѓБэЪОШчЯТЃК

ЩЯУцЫуЪНЕФОиеѓБэЪОШчЯТЃК

ЦфжаЃЌXЧѓЕМВЂШУЗНГЬЕШгкСуЃЌПЩвдЕУЕНМЋжЕЕуЕФЦЋвЦСПЮЊЃК

ЖдгІМЋжЕЕуЃЌЗНГЬЕФжЕЮЊЃК

Цфжа, X^ДњБэЯрЖдВхжЕжааФЕФЦЋвЦСПЃЌЕБЫќдкШЮвЛЮЌЖШЩЯЕФЦЋвЦСПДѓгк0.5ЪБЃЈМДxЛђyЛђ ІвЃЉЃЌвтЮЖзХВхжЕжааФвбОЦЋвЦЕНЫќЕФСкНќЕуЩЯЃЌЫљвдБиаыИФБфЕБЧАЙиМќЕуЕФЮЛжУЁЃЭЌЪБдкаТЕФЮЛжУЩЯЗДИДВхжЕжБЕНЪеСВЃЛвВгаПЩФмГЌГіЫљЩшЖЈЕФЕќДњДЮЪ§ЛђепГЌГіЭМЯёБпНчЕФЗЖЮЇЃЌДЫЪБетбљЕФЕугІИУЩОГ§ЃЌдкLoweжаНјааСЫ5ДЮЕќДњЁЃСэЭтЃЌЙ§аЁЕФЕувзЪмдыЩљЕФИЩШХЖјБфЕУВЛЮШЖЈЃЌЫљвдНЋ
аЁгкФГИіОбщжЕ(LoweТлЮФжаЪЙгУ0.03ЃЌRobHessЕШШЫЪЕЯжЪБЪЙгУ0.04/S)ЕФМЋжЕЕуЩОГ§ЁЃЭЌЪБЃЌдкДЫЙ§ГЬжаЛёШЁЬиеїЕуЕФОЋШЗЮЛжУ(дЮЛжУМгЩЯФтКЯЕФЦЋвЦСП)вдМАГпЖШ(Ів)ЁЃ
2.2.2ЁЂЯћГ§БпдЕЯьгІ
вЛИіЖЈвхВЛКУЕФИпЫЙВюЗжЫузгЕФМЋжЕдкКсПчБпдЕЕФЕиЗНгаНЯДѓЕФжїЧњТЪЃЌЖјдкДЙжББпдЕЕФЗНЯђгаНЯаЁЕФжїЧњТЪЁЃDOGЫузгЛсВњЩњНЯЧПЕФБпдЕЯьгІЃЌашвЊЬоГ§ВЛЮШЖЈЕФБпдЕЯьгІЕуЁЃЛёШЁЬиеїЕуДІЕФHessianОиеѓЃЌжїЧњТЪЭЈЙ§вЛИі2x2ЕФHessianОиеѓHЧѓГіЃЈDЕФжїЧњТЪКЭHЕФЬиеїжЕГЩе§БШЃЉЃК

МйЩшHЕФЬиеїжЕЮЊІСКЭІТЃЈІСЁЂІТДњБэxКЭyЗНЯђЕФЬнЖШЃЉЧвІС>ІТЁЃСюІС=rІТдђгаЃК

ЦфжаTr(H)ЧѓШЁHЕФЖдНЧдЊЫиКЭЃЛDet(H)ЮЊЧѓHЕФааСаЪНжЕЁЃ

дђЙЋЪН(r+1)^2/rЕФжЕдкСНИіЬиеїжЕЯрЕШЪБзюаЁЃЌЫцзХЕФдіДѓЖјдіДѓЁЃжЕдНДѓЃЌЫЕУїСНИіЬиеїжЕЕФБШжЕдНДѓЃЌМДдкФГвЛИіЗНЯђЕФЬнЖШжЕдНДѓЃЌЖјдкСэвЛИіЗНЯђЕФЬнЖШжЕдНаЁЃЌЖјБпдЕЧЁЧЁОЭЪЧетжжЧщПіЁЃЫљвдЮЊСЫЬоГ§БпдЕЯьгІЕуЃЌашвЊШУИУБШжЕаЁгквЛЖЈЕФуажЕЃЌвђДЫЃЌЮЊСЫМьВтжїЧњТЪЪЧЗёдкФГгђжЕrЯТЃЌжЛашМьВт:

ТлЮФНЈвщr=10,OpenCvвВВЩгУr=10
2.2.3ЁЂОЋШЗЖЈЮЛжаЕФЬЉРеВхжЕдДТыЗжЮі
while (i <
SIFT_MAX_INTERP_STEPS)//SIFT_MAX_INTERP_STEPS=5ЮЊзюДѓЕќДњДЮЪ§ЃЌБмУтГЄЪБЕќДњ
{
interp_step(dog_pyr, octv, intvl, r, c, &xi,
&xr, &xc);// ЬЉРееЙПЊФтКЯЃЌxi,xr,xcвРДЮЮЊxЁЂyЁЂІвЗНЯђЦЋвЦСП,
if (ABS(xi) < 0.5 && ABS(xr) < 0.5
&& ABS(xc) < 0.5)//ШчЙћЕБЧАЦЋвЦСПОјЖджЕжаЕФУПИіжЕОљаЁгк0.5ЃЌЭЫГіЕќДњ
break;
c += cvRound(xc);//МЦЫуаазјБъЃЌcvRound ЮЊЫФЩсЮхШыЁЃ
r += cvRound(xr);
intvl += cvRound(xi);
if (intvl < 1 ||//ВЛдкМЦЫуЕФЭМЯёВужа
intvl > intvls ||//ИпЫЙВюЗжУПзщЕФВуЪ§ЮЊintvls
c < SIFT_IMG_BORDER ||//ППНќЭМЯёБпдЕ5ИіЯёЫиЕФЧјгђВЛзіМьВтЃЌSIFT_IMG_BORDER=5,
r < SIFT_IMG_BORDER ||
c >= dog_pyr[octv][0]->width - SIFT_IMG_BORDER
||//ППНќЭМЯёБпдЕ5ИіЯёЫиЕФЧјгђВЛзіМьВт
r >= dog_pyr[octv][0]->height - SIFT_IMG_BORDER)
{
return NULL;
}
i++;//ЕќДњМЦЪ§
} |
static void interp_step(IplImage***
dog_pyr, int octv, int intvl, int r, int c,double*
xi, double* xr, double* xc)
{
CvMat* dD, *H, *H_inv, X;
double x[3] = { 0 };
dD = deriv_3D(dog_pyr, octv, intvl, r, c);//вЛНзЦЋЕМЪ§
H = hessian_3D(dog_pyr, octv, intvl, r, c);//Hessian
ОиеѓМДЖўНзЕМЪ§зщГЩЕФОиеѓ
H_inv = cvCreateMat(3, 3, CV_64FC1);
cvInvert(H, H_inv, CV_SVD);//ЧѓHessianОиеѓЕФФцОиеѓ
cvInitMatHeader(&X, 3, 1, CV_64FC1, x, CV_AUTOSTEP);
cvGEMM(H_inv, dD, -1, NULL, 0, &X, 0); //cvGEMMЮЊОиеѓГЫЗЈЃЌ//ЕквЛИіОиеѓЕФЯЕЪ§ЃЛ//H_invЁЂdDЕквЛЖўИіОиеѓ//-1ОиеѓЧАЕФГЃЪ§//XНсЙћОиеѓ
cvReleaseMat(&dD);
cvReleaseMat(&H);
cvReleaseMat(&H_inv);
*xi = x[2];
*xr = x[1];
*xc = x[0];
} |
3ЁЂЙиМќЕуЗНЯђЗжХф
ЮЊСЫЪЙУшЪіЗћОпгаа§зЊВЛБфадЃЌашвЊРћгУЭМЯёЕФОжВПЬиеїЮЊИјУПвЛИіЙиМќЕуЗжХфвЛИіЛљзМЗНЯђЁЃЪЙгУЭМЯёЬнЖШЕФЗНЗЈЧѓШЁОжВПНсЙЙЕФЮШЖЈЗНЯђЁЃ
3.1ЁЂЬиеїЕуЕФЬнЖШ
3.1.1ЁЂЬнЖШЕФМЦЫу
ЖдгкдкDOGН№зжЫўжаМьВтГіЕФЙиМќЕуЕуЃЌВЩМЏЦфЫљдкИпЫЙН№зжЫўЭМЯё3ІвСьгђДАПкФкЯёЫиЕФЬнЖШКЭЗНЯђЗжВМЬиеїЁЃЬнЖШЕФФЃжЕКЭЗНЯђШчЯТЃК

LЮЊЙиМќЕуЫљдкЕФГпЖШПеМфжЕЃЌАДLoweЕФНЈвщЃЌЬнЖШЕФФЃжЕm(x,y)АД Ів=1.5Ів_oct ЕФИпЫЙЗжВММгГЩЃЌАДГпЖШВЩбљЕФ3ІвддђЃЌСьгђДАПкАыОЖЮЊ
3x1.5Ів_octЁЃ
3.1.1ЁЂЬнЖШжБЗНЭМ
дкЭъГЩЙиМќЕуЕФЬнЖШМЦЫуКѓЃЌЪЙгУжБЗНЭМЭГМЦСьгђФкЯёЫиЕФЬнЖШКЭЗНЯђЁЃЬнЖШжБЗНЭМНЋ0~360ЖШЕФЗНЯђЗЖЮЇЗжЮЊ36Иіжљ(bins)ЃЌЦфжаУПжљ10ЖШЁЃШчЭМ5.1ЫљЪОЃЌжБЗНЭМЕФЗхжЕЗНЯђДњБэСЫЙиМќЕуЕФжїЗНЯђЃЌ(ЮЊМђЛЏЃЌЭМжажЛЛСЫАЫИіЗНЯђЕФжБЗНЭМ)ЁЃ

3.2ЁЂЬиеїЕужїЗНЯђЕФШЗЖЈ
ЗНЯђжБЗНЭМЕФЗхжЕдђДњБэСЫИУЬиеїЕуДІСкгђЬнЖШЕФЗНЯђЃЌвджБЗНЭМжазюДѓжЕзїЮЊИУЙиМќЕуЕФжїЗНЯђЁЃЮЊСЫдіЧПЦЅХфЕФТГАєадЃЌжЛБЃСєЗхжЕДѓгкжїЗНЯђЗхжЕ80ЃЅЕФЗНЯђзїЮЊИУЙиМќЕуЕФИЈЗНЯђЁЃвђДЫЃЌЖдгкЭЌвЛЬнЖШжЕЕФЖрИіЗхжЕЕФЙиМќЕуЮЛжУЃЌдкЯрЭЌЮЛжУКЭГпЖШНЋЛсгаЖрИіЙиМќЕуБЛДДНЈЕЋЗНЯђВЛЭЌЁЃНіга15ЃЅЕФЙиМќЕуБЛИГгшЖрИіЗНЯђЃЌЕЋПЩвдУїЯдЕФЬсИпЙиМќЕуЦЅХфЕФЮШЖЈадЁЃЪЕМЪБрГЬЪЕЯжжаЃЌОЭЪЧАбИУЙиМќЕуИДжЦГЩЖрЗнЙиМќЕуЃЌВЂНЋЗНЯђжЕЗжБ№ИГИјетаЉИДжЦКѓЕФЙиМќЕуЃЌВЂЧвЃЌРыЩЂЕФЬнЖШЗНЯђжБЗНЭМвЊНјааВхжЕФтКЯДІРэЃЌРДЧѓЕУИќОЋШЗЕФЗНЯђНЧЖШжЕЁЃ
3.2.1ЁЂЬнЖШЭМЯёЕФЦНЛЌДІРэ
ЮЊСЫЗРжЙФГИіЬнЖШЗНЯђНЧЖШвђЪмЕНдыЩљЕФИЩШХЖјЭЛБфЃЌЮвУЧЛЙашвЊЖдЬнЖШЗНЯђжБЗНЭМНјааЦНЛЌДІРэЁЃOpencv
ЫљЪЙгУЕФЦНЛЌЙЋЪНЮЊЃК

ЦфжаiЁЪ[0,35],h КЭH ЗжБ№БэЪОЦНЛЌЧАКЭЦНЛЌКѓЕФжБЗНЭМЁЃгЩгкНЧЖШЪЧбЛЗЕФЃЌМД00=3600ЃЌШчЙћГіЯжh(j)ЃЌjГЌГіСЫ(0,Ё,35)ЕФЗЖЮЇЃЌФЧУДПЩвдЭЈЙ§дВжмбЛЗЕФЗНЗЈевЕНЫќЫљЖдгІЕФЁЂдк00=3600жЎМфЕФжЕЃЌШчh(-1)
= h(35)ЁЃ
3.2.2ЁЂЬнЖШжБЗНЭМХзЮяЯпВхжЕ

МйЩшЮвУЧдкЕкiИіаЁжљзгвЊеввЛИіОЋШЗЕФЗНЯђЃЌФЧУДгЩЩЯУцЗжЮіжЊЕРЃК
ЩшВхжЕХзЮяЯпЗНГЬЮЊh(t)=at2+bt+c,ЦфжаaЁЂbЁЂcЮЊХзЮяЯпЕФЯЕЪ§ЃЌtЮЊздБфСПЃЌtЁЪ[-1,1],ДЫХзЮяЯпЧѓЕМВЂСюЫќЕШгк0ЁЃ
МДh(t)Ёф=0 ЕУtmax=-b/(2a)
ЯждкАбетШ§ИіВхжЕЕуДјШыЗНГЬПЩЕУЃК

3.2.3ЁЂХзЮяЯпВхжЕдДТыЗжЮі
#define interp_hist_peak(
l, c, r ) ( 0.5 * ((l)-(r)) / ((l) - 2.0*(c) +
(r)) )//ВхжЕМЦЫуЪНЃЌlЮЊзѓВржљзгжЕЃЌrЮЊзѓВржљзгжЕ
static void add_good_ori_features(CvSeq* features,
double* hist, int n,
double mag_thr, struct feature* feat)//ОЋШЗжїЗНЯђМАИЈЗНЯђ
{
struct feature* new_feat;
double bin, PI2 = CV_PI * 2.0;//CV_PI=pi
int l, r, i;
for (i = 0; i < n; i++)// жБЗНЭМгаn=36ИіаЁжљзг
{
l = (i == 0) ? n - 1 : i - 1;//АбаЁжљзгПДГЩЪЧбЛЗЕФЃЌНЧЖШЕФШЁжЕЮЊ0-360МДвЛИідВжм
r = (i + 1) % n;
//жЛЖдаЁжљзгЕФжЕДѓгкЕШгкжїЗх80%ЧвДЫаЁжљзгБШзѓгвСНБпаЁжљзгЖМИпЕФжљзгНјааХзЮяЯпВхжЕ
if (hist[i] > hist[l] && hist[i] >
hist[r] && hist[i] >= mag_thr)// mag_thrЮЊ>=80%ЕФзюИпЗхжЕ
{
bin = i + interp_hist_peak(hist[l], hist[i], hist[r]);//interp_hist_peak
ВхжЕКЏЪ§
bin = (bin < 0) ? n + bin : (bin >= n) ?
bin - n : bin;//НЧЖШШЁжЕдМЪјдк0-360жЎМфЃЌЧвЪЧСЌајбЛЗЕФ
new_feat = clone_feature(feat);//ЗљжЕЬиеїЕу
new_feat->ori = ((PI2 * bin) / n) - CV_PI;//ЃП
cvSeqPush(features, new_feat);
free(new_feat);
} |
жСДЫЃЌЭМЯёЕФЙиМќЕувбМьВтЭъБЯЃЌУПИіЙиМќЕугаШ§ИіаХЯЂЃКЮЛжУЁЂЫљДІГпЖШЁЂЗНЯђЁЃгЩДЫПЩвдШЗЖЈвЛИіSIFTЬиеїЧјгђЁЃ
4ЁЂЬиеїЕуУшЪіЗћ
ЭЈЙ§вдЩЯВНжшЃЌЖдгкУПвЛИіЙиМќЕуЃЌгЕгаШ§ИіаХЯЂЃКЮЛжУЁЂГпЖШвдМАЗНЯђЁЃНгЯТРДОЭЪЧЮЊУПИіЙиМќЕуНЈСЂвЛИіУшЪіЗћЃЌЪЙЦфВЛЫцИїжжБфЛЏЖјИФБфЃЌБШШчЙтееБфЛЏЁЂЪгНЧБфЛЏЕШЕШЁЃВЂЧвУшЪіЗћгІИУгаНЯИпЕФЖРЬиадЃЌвдБугкЬсИпЬиеїЕуе§ШЗЦЅХфЕФИХТЪЁЃ
4.1ЁЂЬиеїЕФЩњГЩЙ§ГЬ
4.1.1ЁЂШЗЖЈМЦЫуУшЪізгЫљашЕФЧјгђ
НЋЙиМќЕуИННќЕФЧјгђЛЎЗжЮЊd*d(LoweНЈвщd=4)ИізгЧјгђЃЌУПИізгЧјгђзїЮЊвЛИіжжзгЕуЃЌУПИіжжзгЕуга8ИіЗНЯђЁЃПМТЧЕНЪЕМЪМЦЫуЪБЃЌашвЊВЩгУШ§ЯпадВхжЕЃЌЫљашЭМЯёДАПкБпГЄЮЊ3x3xІв_oct
x(d+1)ЁЃдкПМТЧЕНа§зЊвђЫи(ЗНБуЯТвЛВННЋзјБъжса§зЊЕНЙиМќЕуЕФЗНЯђ)ЃЌШчЯТЭМ6.1ЫљЪОЃЌЪЕМЪМЦЫуЫљашЕФЭМЯёЧјгђАыОЖЮЊЃК


4.1.2ЁЂзјБъжса§зЊжСжїЗНЯђ
НЋзјБъжса§зЊЮЊЙиМќЕуЕФЗНЯђЃЌвдШЗБЃа§зЊВЛБфадЁЃ

4.1.3ЁЂЬнЖШжБЗНЭМЕФЩњГЩ
НЋСкгђФкЕФВЩбљЕуЗжХфЕНЖдгІЕФзгЧјгђФкЃЌНЋзгЧјгђФкЕФЬнЖШжЕЗжХфЕН8ИіЗНЯђЩЯЃЌМЦЫуЦфШЈжЕЁЃ
а§зЊКѓЕФВЩбљЕу ТфдкзгЧјгђЕФЯТБъЮЊ

4.1.4ЁЂШ§ЯпадВхжЕ
ВхжЕМЦЫуУПИіжжзгЕуАЫИіЗНЯђЕФЬнЖШЁЃ
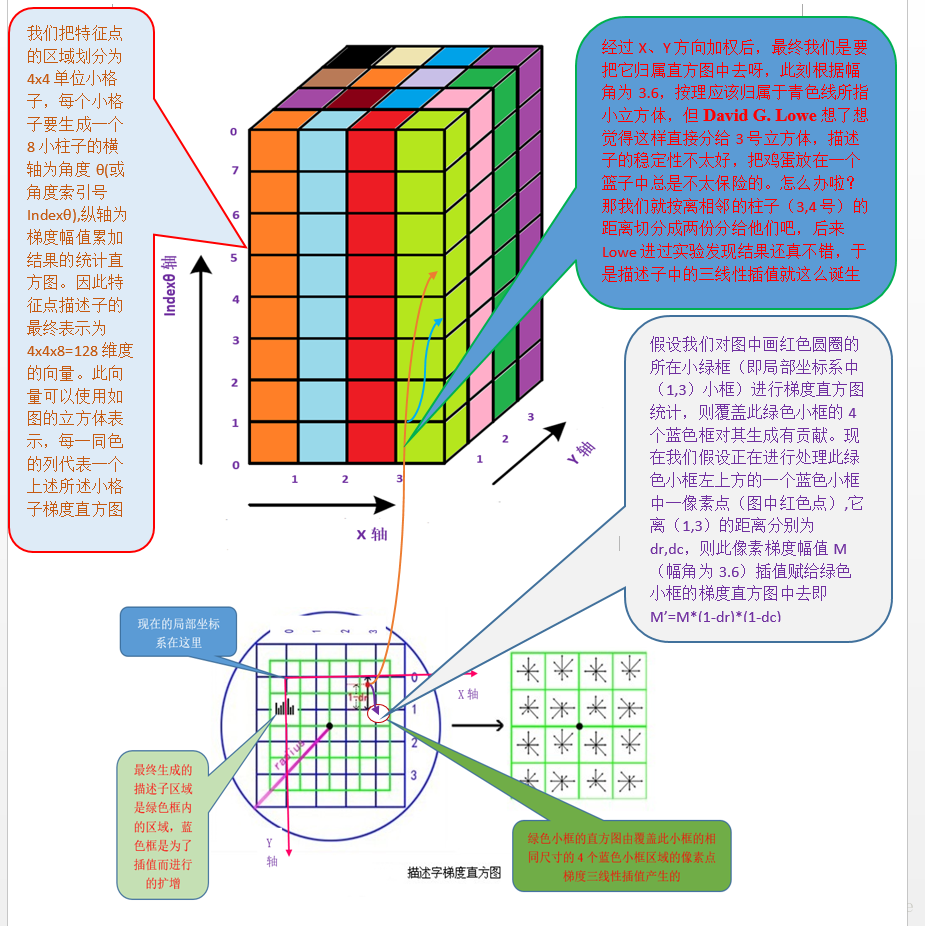
ВЩбљЕудкзгЧјгђжаЕФЯТБъ(x'',y'') (ЭМжаРЖЩЋДАПкФкКьЩЋЕу)ЯпадВхжЕЃЌМЦЫуЦфЖдУПИіжжзгЕуЕФЙБЯзЁЃШчЭМжаЕФКьЩЋЕуЃЌТфдкЕк0ааКЭЕк1аажЎМфЃЌЖдетСНааЖМгаЙБЯзЁЃЖдЕк0ааЕк3СажжзгЕуЕФЙБЯзвђзгЮЊdrЃЌЖдЕк1ааЕк3СаЕФЙБЯзвђзгЮЊ1-drЃЌЭЌРэЃЌЖдСкНќСНСаЕФЙБЯзвђзгЮЊdcКЭ1-dcЃЌЖдСкНќСНИіЗНЯђЕФЙБЯзвђзгЮЊdoКЭ1-doЁЃдђзюжеРлМгдкУПИіЗНЯђЩЯЕФЬнЖШДѓаЁЮЊЃК

ЦфжаkЃЌmЃЌnЮЊ0ЃЈЯёЫиЕуГЌГіСЫЖдвЊВхжЕЧјМфЕФЫФИіСкНќзгЧјМфЫљдкЗЖЮЇЃЉЛђЮЊ1ЃЈЯёЫиЕуДІдкЖдвЊВхжЕЧјМфЕФЫФИіСкНќзгЧјМфжЎвЛЫљдкЗЖЮЇЃЉЁЃ
4.1.5ЁЂЬиеїУшЪізг
ШчЩЯЭГМЦЕФ4*4*8=128ИіЬнЖШаХЯЂМДЮЊИУЙиМќЕуЕФЬиеїЯђСПЁЃ
ЬиеїЯђСПаЮГЩКѓЃЌЮЊСЫШЅГ§ЙтееБфЛЏЕФгАЯьЃЌашвЊЖдЫќУЧНјааЙщвЛЛЏДІРэЃЌЖдгкЭМЯёЛвЖШжЕећЬхЦЏвЦЃЌЭМЯёИїЕуЕФЬнЖШЪЧСкгђЯёЫиЯрМѕЕУЕНЃЌЫљвдвВФмШЅГ§ЁЃЕУЕНЕФУшЪізгЯђСПЮЊH=(h1,h2,.......,h128)ЃЌЙщвЛЛЏКѓЕФЬиеїЯђСПЮЊL=(L1,L2,......,L128)ЃЌдђ

4.1.6ЁЂУшЪізгЕФУХЯоЛЏ
ЗЧЯпадЙтееЃЌЯрЛњБЅКЭЖШБфЛЏЖддьГЩФГаЉЗНЯђЕФЬнЖШжЕЙ§ДѓЃЌЖјЖдЗНЯђЕФгАЯьЮЂШѕЁЃвђДЫЩшжУУХЯожЕ(ЯђСПЙщвЛЛЏКѓЃЌвЛАуШЁ0.2)НиЖЯНЯДѓЕФЬнЖШжЕ(Дѓгк0.2ЕФдђОЭСюЫќЕШгк0.2ЃЌаЁгк0.2ЕФдђБЃГжВЛБф)ЁЃШЛКѓдйНјаавЛДЮЙщвЛЛЏДІРэЃЌЬсИпЬиеїЕФМјБ№адЁЃ
4.2ЁЂУшЪізгЯрЙиЗжЮі
гУвЛзщЭМРДИХРЈУшЪізгЕФЩњГЩЙ§ГЬ
4.2.1ЁЂУшЪізгЩњГЩзмРЈ

4.2.3ЁЂУшЪізгШ§ЯпадВхжЕдДТыЗжЮі
static void interp_hist_entry(double***
hist, double rbin, double cbin,
double obin, double mag, int d, int n)
{
double d_r, d_c, d_o, v_r, v_c, v_o;
double** row, *h;
int r0, c0, o0, rb, cb, ob, r, c, o;
r0 = cvFloor(rbin);//ЯђЯТШЁећ
c0 = cvFloor(cbin);
o0 = cvFloor(obin);
d_r = rbin - r0;//аЁЪ§грЯю
d_c = cbin - c0;
d_o = obin - o0;
for (r = 0; r <= 1; r++)//бизХааЗНЯђВЛГЌЙ§1ИіЕЅЮЛГЄЖШ
{
rb = r0 + r;
if (rb >= 0 && rb < d)//ШчЙћДЫПЬЛЙдкеце§ЕФУшЪізгЧјМфФк
{
v_r = mag * ((r == 0) ? 1.0 - d_r : d_r);//d_r
= rbin - r0;
row = hist[rb];
for (c = 0; c <= 1; c++)//бизХааЗНЯђВЛГЌЙ§1ИіЕЅЮЛГЄЖШ
{
cb = c0 + c;
if (cb >= 0 && cb < d)
{
v_c = v_r * ((c == 0) ? 1.0 - d_c : d_c);
h = row[cb];
for (o = 0; o <= 1; o++)//бизХжБЗНЭМЗНЯђВЛГЌЙ§1ИіЕЅЮЛНЧЖШ
{
ob = (o0 + o) % nЃЛ//n=8ЃЌ8ИіаЁжљзг
v_o = v_c * ((o == 0) ? 1.0 - d_o : d_o);
h[ob] += v_o;
}
}
}
} |
ЭЈЙ§ЩЯУцЕФ1жС4ИіДѓВНжшОЭПЩвдЭъГЩSIFTЫуЗЈЖдЭМЯёЬиеїЕуЕФЬсШЁЁЃжСДЫSIFTЫуЗЈЭъНсЁЃЭМЯёЬиеїЬсШЁЪЧЭМЯёЦЅХфЕФЛљДЁЃЌОЙ§ДЫЫуЗЈЬсШЁГіРДЕФЬиеїЕугУгкКѓајЕФЭМЯёЬиеїЦЅХфКЭЬиеїЪЖБ№жаЃЌЙигкЭМЯёЬиеїЦЅХфЯрЙиФкШнНЋдкКѓајНВНтЁЃ
|